本文是FreeRTOS复习笔记的第六节,队列操作。
上一篇文章: 【复习笔记】reeRTOS(四) 列表项的插入和删除
文章目录
- 1.队列操作
- 1.1.队列操作过程
- 1.2.队列操作常用的API函数
- 二、实验设计
- 三、测试例程
- 四、实验效果
1.队列操作
队列是为了任务与任务、任务与中断之间的通信而准备的,可以在任务与任务、任务与中断之间传递消息,队列中可以存储有限的、大小固定的数据项目。任务与任务、任务与中断之间要交流的数据保存在队列中,叫做队列项目。队列所能保存的最大数据项目数量叫做队列的长度,创建队列的时候会指定数据项目的大小和队列的长度。由于队列用来传递消息的,所以也称为消息队列。
1.1.队列操作过程
创建队列

上图中任务 A 要向任务 B 发送消息,这个消息是x 变量的值。首先创建一个队列,并且指定队列的长度和每条消息的长度。这里我们创建了一个长度为 4 的队列,因为要传递的是x值,而x是个 int类型的变量,所以每条消息的长度就是 int 类型的长度,在 STM32 中就是4字节,即每条消息是 4 个字节的。
向队列发送第一个消息

上图中任务A的变量x值为10,将这个值发送到消息队列中。此时队列剩余长度就是3了。队列中发送消息是采用拷贝的方式,所以一旦消息发送完成变量x就可以再次被使用,赋其他的值。
向队列发送第二个消息

上图中任务 A 又向队列发送了一个消息,即新的x 的值,这里是 20。此时队列剩余长度为 2。
从队列中读取消息

上图中任务 B 从队列中读取消息,并将读取到的消息值赋值给 y,这样 y 就等于 10了。任务 B 从队列中读取消息完成以后可以选择清除掉这个消息或者不清除。当选择清除这个消息的话其他任务或中断就不能获取这个消息了,而且队列剩余大小就会加一,变成 3。如果不清除的话其他任务或中断也可以获取这个消息,而队列剩余大小依旧是 2。
队列的内容除了队列的创建、队列的出队、入队函数、队列的环形缓冲区的实现,还有数据的拷贝、先进先出、以及后进先出的实现、队列锁、以及队列任务级函数与中断级函数的区别等知识。
由于队列的知识也比较多,这里只是进行一个简单的使用,学会队列的基本操作。
1.2.队列操作常用的API函数
| 函数名称 | 作用 |
|---|---|
| xQueueCreate() | 动态创建队列 |
| xQueueCreateStatic() | 静态创建队列 |
| xQueueSend() | 队列数据发送 |
| xQueueReceive() | 队列数据接收 |
二、实验设计
实验目的:学会对FreeRTOS 简单队列操作
实验设计:设计两个任务: task1 task 和 task2 task ,其中 task1 task 和 task2 task的任务优先级相同,这三个任务的任务功能如下:
- task1 task :发送一串字符
- task2 task :接收任务1的字符
三、测试例程
主函数 main.c代码如下:
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"/*使用结构体储存数据*/
struct QueuePrint
{uint8_t Tick;char Data[20];
};QueueHandle_t myPrintfQueue;void task1_task(void *p); //任务函数
void task2_task(void *p); //任务函数int main(void)
{ NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组4delay_init(168); //初始化延时函数uart_init(115200); //初始化串口LED_Init(); //初始化LED端口/*动态创建队列,2个队列项目,一个发送一个接收,以及消息长度(结构体大小)*/myPrintfQueue=xQueueCreate(2,sizeof(struct QueuePrint));if(myPrintfQueue==NULL){printf("队列创建失败!\r\n");}xTaskCreate(task1_task,"task1_task",128,NULL,2,NULL); //任务1 xTaskCreate(task2_task,"task2_task",128,NULL,2,NULL); //任务2 vTaskStartScheduler(); //开启任务调度
}//任务1函数 发送数据
void task1_task(void *p)
{struct QueuePrint SendData={.Data="adafsf" //随便发个字符串};while(1){SendData.Tick++;xQueueSend(myPrintfQueue,&SendData,0); //队列句柄,发送内容的地址,阻塞时间printf("task1发送数据:%s 次数%d\r\n",SendData.Data,SendData.Tick);vTaskDelay(500);}
} //任务2函数接收数据
void task2_task(void *p)
{struct QueuePrint ReceData;BaseType_t xStatus;while(1){xStatus=xQueueReceive(myPrintfQueue,&ReceData,portMAX_DELAY);//portMAX_DELAY:读不到数据就会一直停留在此if(xStatus==pdPASS) //判断接收到数据{taskENTER_CRITICAL(); //进入临界区printf("task2收到数据:%s 次数%d\r\n",ReceData.Data,ReceData.Tick);taskEXIT_CRITICAL(); //退出临界区}}
}四、实验效果
实验效果如下:
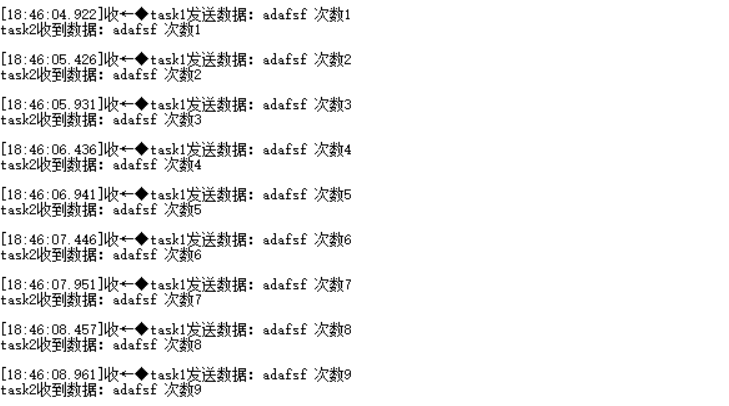
接上串口,可以看到每500ms,串口打印任务1发送的内容和任务运行次数,以及任务2接收到的内容和任务执行次数,而且收发的数据保持一致。
本节主要是学习和掌握队列操作,以及相关API函数的基本使用。其实在FreeRTOS中队列的重要性也不言而喻,与FreeRTOS任务调度同等重要,因为后面的各种信号量基本都是基于队列的。
完整程序放在gitee仓库上:程序下载。







![[尚硅谷flink] 检查点笔记](https://img-blog.csdnimg.cn/img_convert/88b730e4882d6a9c23fe17eeaa312791.png)