目录
1、修改显示界面
2、 添加对SR501显示的处理和tcp消息的处理
3、 在服务器程序中添加对SR501的处理
4、 编写驱动句柄
5、 修改底层驱动
1、修改显示界面
有个奇怪的问题这里的注释如果用''' '''就会报错不知道为啥,只能用#来注释

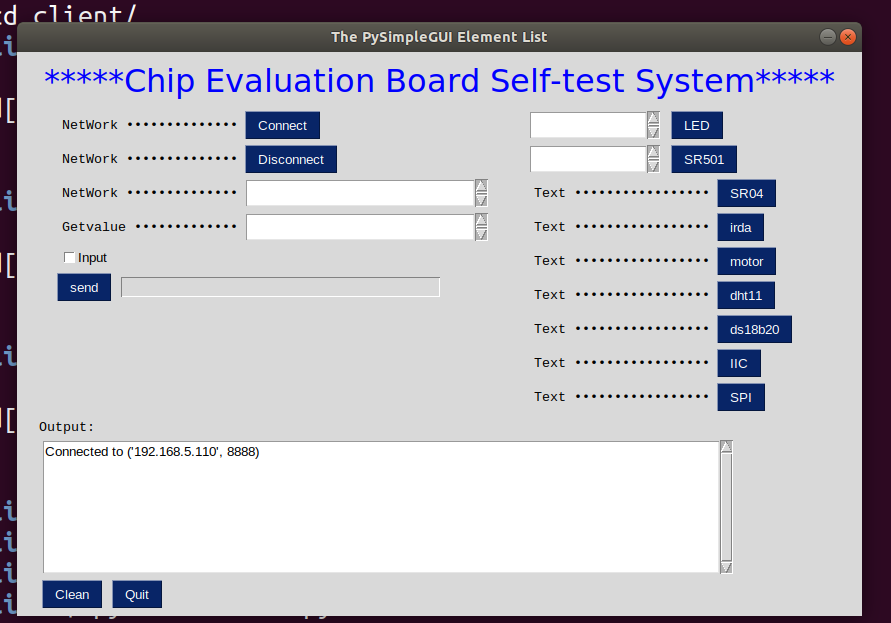
我把显示这里需要显示的器件的显示单独放到按键前了,都放下面大的output中显示太乱了。
2、 添加对SR501显示的处理和tcp消息的处理
'''
fuction : 客户端程序
author : 辛天宇
date : 2024-4-13
-------------------------------
author date modify
辛天宇 2024-4-15 结合GUI和网络通信'''
import show
import tcp
import tool
import socket
import global_vardef send_handle(window, client_socket, values):global_var.TX_BUF = values['txbuff'] print(f"txbuff={global_var.TX_BUF}")# 清理inputwindow['txbuff'].update(value='')data = global_var.TX_BUFclient_socket.sendall(data.encode())# 接收服务器的响应data = client_socket.recv(512)# 将字节字符串转化为字符串global_var.RX_BUF = data.decode('utf-8')print(f"rx......{global_var.RX_BUF}") def quit_handel(client_socket):cmd='Q'client_socket.sendall(cmd.encode())tcp.disconnect_to_server(client_socket)# 进行一次发送和接收
def send_cmd(client_socket):data = global_var.TX_BUFclient_socket.sendall(data.encode())# 接收服务器的响应data = client_socket.recv(512)# 将字节字符串转化为字符串global_var.RX_BUF = data.decode('utf-8')# 设置发送消息
def set_tx_buf(device, message): if device == 'sr04':global_var.TX_BUF = '@002'if device == 'led':global_var.TX_BUF = '@000'+messageelif device == 'sr501':global_var.TX_BUF = '@001'+messageelif device == 'irda':global_var.TX_BUF = '@003'elif device == 'motor':global_var.TX_BUF = '@004'+messageelif device == 'dht11':global_var.TX_BUF = '@005'+messageprint(f"dht11={global_var.TX_BUF}")elif device == 'ds18b20':global_var.TX_BUF = '@006'elif device == 'iic':global_var.TX_BUF = '@007'elif device == 'spi':global_var.TX_BUF = '@008'# 处理数据
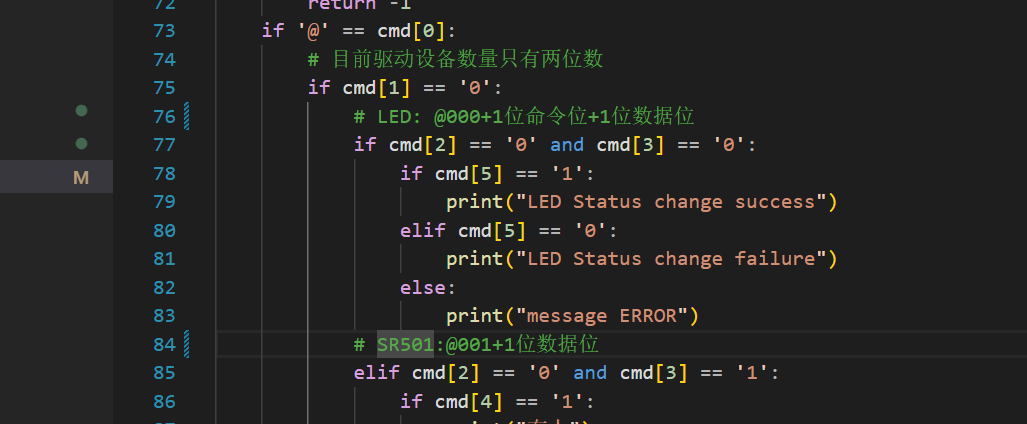
def cmd_handle(window):cmd = global_var.RX_BUFif len(cmd) < 4:print("cmd ERROR")return -1if '@' == cmd[0]:# 目前驱动设备数量只有两位数if cmd[1] == '0':# LED: @000+1位命令位+1位数据位if cmd[2] == '0' and cmd[3] == '0':if cmd[5] == '1':print("LED Status change success")elif cmd[5] == '0':print("LED Status change failure")else:print("message ERROR")# SR501:@001+1位数据位elif cmd[2] == '0' and cmd[3] == '1':if cmd[4] == '1':print("有人")message='有人'window['SR501_O'].update(message)elif cmd[4] == '0':print("无人")message='无人'window['SR501_O'].update(message)else:print("message ERROR")#SR04elif cmd[2] == '0' and cmd[3] == '2':print(cmd[4:])#irdaelif cmd[2] == '0' and cmd[3] == '3':print(cmd[4:])#motorelif cmd[2] == '0' and cmd[3] == '4':print(cmd[4:])#dht11elif cmd[2] == '0' and cmd[3] == '5':print(cmd[4:])global_var.TEM=cmd[4]+cmd[5]global_var.HUM=cmd[6]+cmd[7]#ds18b20elif cmd[2] == '0' and cmd[3] == '6':print(cmd[4:])#iicelif cmd[2] == '0' and cmd[3] == '7':print(cmd[4:])#spielif cmd[2] == '0' and cmd[3] == '8':print(cmd[4:])# 处理事件
def event_handle(window, client_socket):led = 0# 事件循环 while True: try:cmd_handle(window)event, values = window.read()if event == 'input':window['txbuff'].update(disabled=not values['input'])elif event == 'send':send_handle(window, client_socket, values)elif event == 'Clean':window['Output'].update(value='')elif event == 'dht11':set_tx_buf('dht11', '2525')send_cmd(client_socket)message = f"{global_var.TEM}°C {global_var.HUM}%"window['Getvalue'].update(message)elif event == 'ds18b20':set_tx_buf('ds18b20')send_cmd(client_socket)message = f"{global_var.TEM}°C"window['Getvalue'].update(message)elif event == 'Quit': quit_handel(client_socket) print(f"See you.............")breakelif event is None:print(f"xxxxxxxxxxxxxxxxxxxx")breakelif event == 'LED':if led % 2 == 0:set_tx_buf('led','p1')else:set_tx_buf('led','p0')led+=1if led > 100:led = 0send_cmd(client_socket)elif event == 'SR501':set_tx_buf('sr501','g')send_cmd(client_socket)# 处理其他事件...except Exception as e:window.close()print(f"An error occurred: {e}")return 0window.close()return 0 def main():# 创建GUI对象window = show.show_window('DefaultNoMoreNagging')# 尝试连接到服务器 client_socket = tcp.connect_to_server()if client_socket is not None: event_handle(window, client_socket)if __name__ == '__main__':main()
3、 在服务器程序中添加对SR501的处理
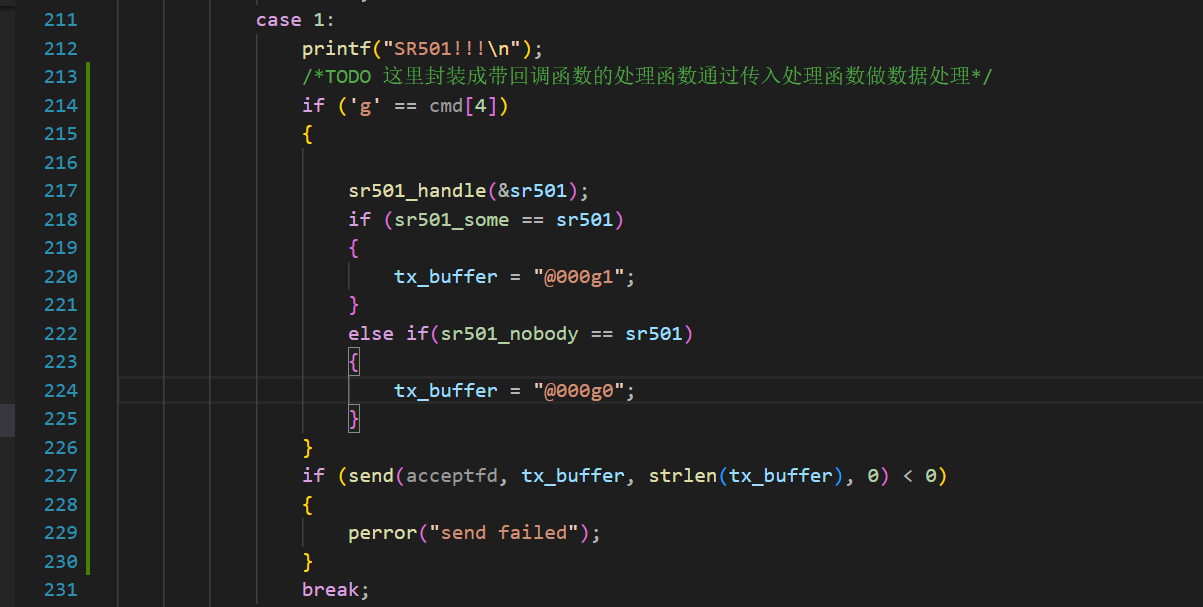
4、 编写驱动句柄
/*
*author : xintianyu
*function : Handle sr501 Settings
*date : 2024-4-17
-----------------------
author date modify*/
int sr501_handle(int* data)
{char *device = "/dev/CEBSS_sr501";int ret;char buf[2];static int fd;int val;int timeout_ms = 5000;int flags;/* 打开文件 */fd = open(device, O_RDWR);if (fd == -1){printf("can not open file %s\n", device);return ERROR;}if (read(fd, &val, 1) > 0){if (val == 0x100){data = 1;printf("get button: %#x ,有人\n", val);}else{data = 0;printf("get button: %#x ,无人\n", val);}}else{printf("get button: -1\n");close(fd);return ERROR;}close(fd);return NOERROR;
}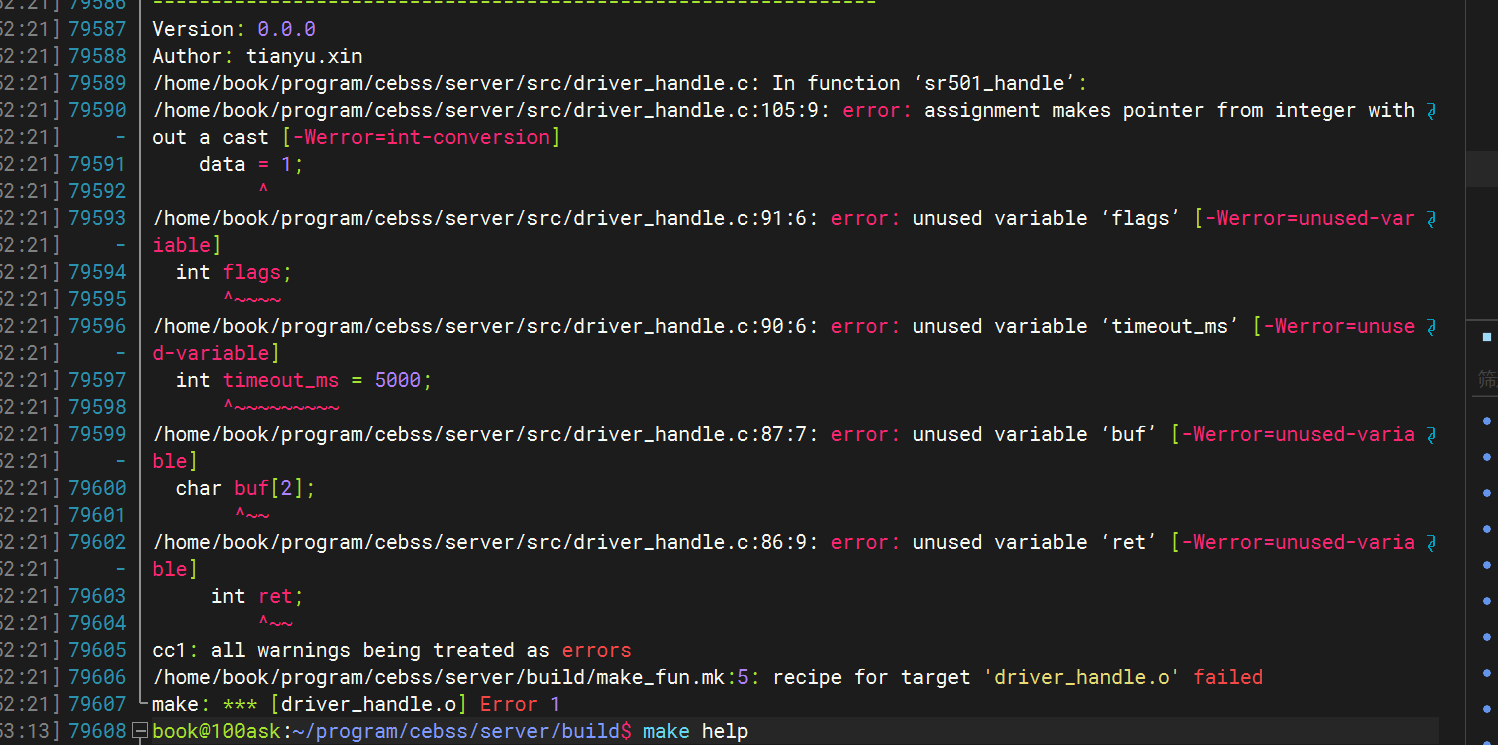 编译一下报错
编译一下报错
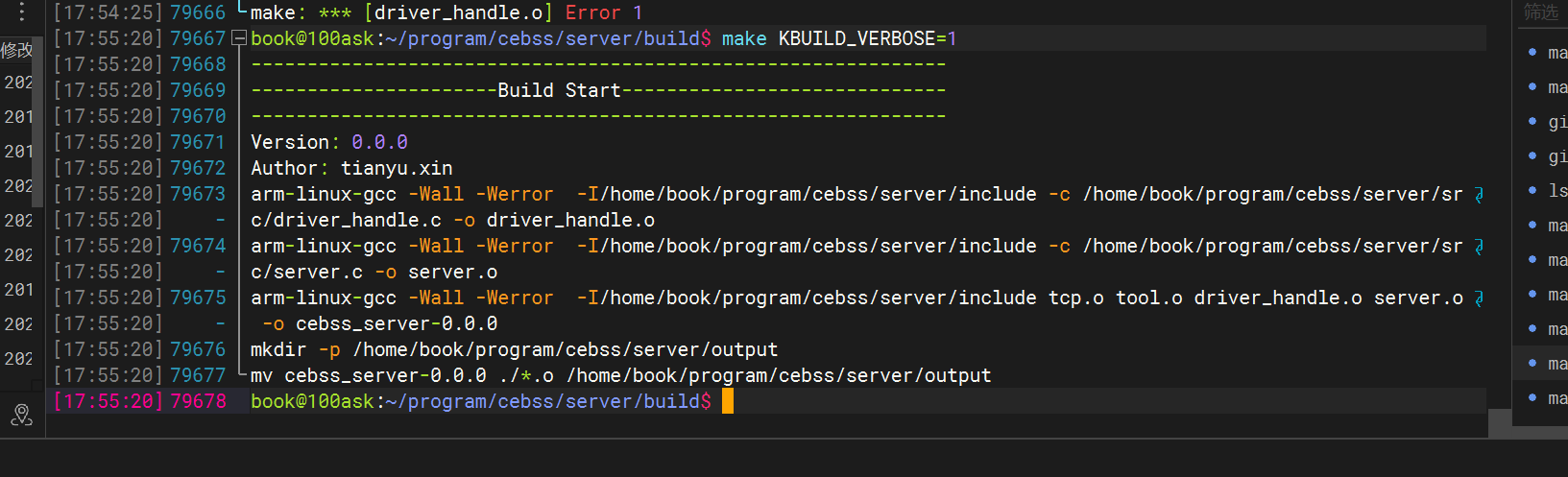
修改一下
/*
*author : xintianyu
*function : Handle sr501 Settings
*date : 2024-4-17
-----------------------
author date modify*/
int sr501_handle(int* data)
{char *device = "/dev/CEBSS_sr501";int ret = NOERROR;static int fd;int val;/* 打开文件 */fd = open(device, O_RDWR);if (fd == -1){printf("can not open file %s\n", device);return ERROR;}if (read(fd, &val, 1) > 0){if (val == 0x100){*data = 1;printf("get button: %#x ,有人\n", val);}else{*data = 0;printf("get button: %#x ,无人\n", val);}}else{printf("get button: -1\n");ret = ERROR;}close(fd);return ret;
} 
5、 修改底层驱动
韦东山老师的用中断实现的太浪费资源了,这个小东西完全没必要啊
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/init.h>
#include <linux/gpio.h>
#include <linux/device.h>
#include <linux/uaccess.h>
#include <linux/slab.h> #define DEVICE_NAME "CEBSS_sr501"
#define CLASS_NAME "sr501_gpio_pin"
#define YOUR_GPIO_NUMBER 115struct gpio_pin_dev { struct cdev cdev; unsigned int gpio;
}; static dev_t first_dev;
static struct class *gpio_pin_class;
static struct gpio_pin_dev *dev;static int gpio_pin_open(struct inode *inode, struct file *file)
{ struct gpio_pin_dev *dev = container_of(inode->i_cdev, struct gpio_pin_dev, cdev); int ret; ret = gpio_request(dev->gpio, DEVICE_NAME); if (ret) { printk(KERN_ERR "%s: gpio_request failed\n", DEVICE_NAME); return ret; } ret = gpio_direction_input(dev->gpio); if (ret) { printk(KERN_ERR "%s: gpio_direction_input failed\n", DEVICE_NAME); gpio_free(dev->gpio); return ret; } file->private_data = dev; return 0;
} static int gpio_pin_read(struct file *file, char __user *buf, size_t count, loff_t *ppos)
{ dev = file->private_data; int value; value = gpio_get_value(dev->gpio); if (copy_to_user(buf, &value, sizeof(value))) { printk(KERN_ERR "%s: copy_to_user failed\n", DEVICE_NAME); return -EFAULT; } return sizeof(value);
} static int gpio_pin_release(struct inode *inode, struct file *file)
{ struct gpio_pin_dev *dev = file->private_data; gpio_free(dev->gpio); return 0;
} static const struct file_operations gpio_pin_fops = { .owner = THIS_MODULE, .open = gpio_pin_open, .read = gpio_pin_read, .release = gpio_pin_release, // ... 可以添加其他操作 ...
}; static int __init gpio_pin_init(void)
{ int ret;// 分配设备号 ret = alloc_chrdev_region(&first_dev, 0, 1, DEVICE_NAME); if (ret < 0) { printk(KERN_ERR "%s: alloc_chrdev_region failed\n", DEVICE_NAME); return ret; } // 初始化设备结构体 dev = kzalloc(sizeof(struct gpio_pin_dev), GFP_KERNEL); if (!dev) { printk(KERN_ERR "%s: kzalloc failed\n", DEVICE_NAME); unregister_chrdev_region(first_dev, 1); return -ENOMEM; } // 设置GPIO引脚编号 dev->gpio = YOUR_GPIO_NUMBER; dev->cdev.owner = THIS_MODULE; dev->cdev.ops = &gpio_pin_fops; // 注册字符设备 cdev_init(&dev->cdev, &gpio_pin_fops);ret = cdev_add(&dev->cdev, first_dev, 1); if (ret) { printk(KERN_ERR "%s: cdev_add failed\n", DEVICE_NAME); kfree(dev); unregister_chrdev_region(first_dev, 1); return ret; } // 创建设备类 gpio_pin_class = class_create(THIS_MODULE, CLASS_NAME); if (IS_ERR(gpio_pin_class)) { printk(KERN_ERR "%s: class_create failed\n", DEVICE_NAME); cdev_del(&dev->cdev); kfree(dev); unregister_chrdev_region(first_dev, 1); return PTR_ERR(gpio_pin_class); } // 创建设备节点 device_create(gpio_pin_class, NULL, first_dev, NULL, DEVICE_NAME); printk(KERN_INFO "%s: Device created with major %d and minor %d\n", DEVICE_NAME, MAJOR(first_dev), MINOR(first_dev)); return 0;
}static void __exit gpio_pin_exit(void)
{ dev_t devno = MKDEV(MAJOR(first_dev), 0);// 删除设备节点 device_destroy(gpio_pin_class, devno); // 注销字符设备 cdev_del(&dev->cdev); // 销毁设备类 class_destroy(gpio_pin_class); // 释放设备号 unregister_chrdev_region(devno, 1); // 释放设备结构体内存 kfree(dev); printk(KERN_INFO "gpio_pin_exit: Module unloaded\n");
} module_init(gpio_pin_init);
module_exit(gpio_pin_exit); MODULE_LICENSE("GPL");
出现了意外貌似把板子烧了用这个器件现在一直拿不到消息了。
#include <linux/module.h>
#include <linux/poll.h>#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>struct gpio_desc{int gpio;int irq;char *name;int key;struct timer_list key_timer;
} ;static struct gpio_desc gpios[2] = {{115, 0, "sr501", },
};/* 主设备号 */
static int major = 0;
static struct class *gpio_class;/* 环形缓冲区 */
#define BUF_LEN 128
static int g_keys[BUF_LEN];
static int r, w;struct fasync_struct *button_fasync;#define NEXT_POS(x) ((x+1) % BUF_LEN)static int is_key_buf_empty(void)
{return (r == w);
}static int is_key_buf_full(void)
{return (r == NEXT_POS(w));
}static void put_key(int key)
{if (!is_key_buf_full()){g_keys[w] = key;w = NEXT_POS(w);}
}static int get_key(void)
{int key = 0;if (!is_key_buf_empty()){key = g_keys[r];r = NEXT_POS(r);}return key;
}static DECLARE_WAIT_QUEUE_HEAD(gpio_wait);/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t gpio_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);int err;int key;if (is_key_buf_empty() && (file->f_flags & O_NONBLOCK))return -EAGAIN;wait_event_interruptible(gpio_wait, !is_key_buf_empty());key = get_key();err = copy_to_user(buf, &key, 4);return 4;
}static unsigned int gpio_drv_poll(struct file *fp, poll_table * wait)
{//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);poll_wait(fp, &gpio_wait, wait);return is_key_buf_empty() ? 0 : POLLIN | POLLRDNORM;
}static int gpio_drv_fasync(int fd, struct file *file, int on)
{if (fasync_helper(fd, file, on, &button_fasync) >= 0)return 0;elsereturn -EIO;
}/* 定义自己的file_operations结构体 */
static struct file_operations gpio_key_drv = {.owner = THIS_MODULE,.read = gpio_drv_read,.poll = gpio_drv_poll,.fasync = gpio_drv_fasync,
};static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{struct gpio_desc *gpio_desc = dev_id;int val;int key;printk("gpio_key_isr key %d irq happened\n", gpio_desc->gpio);val = gpio_get_value(gpio_desc->gpio);//printk("key_timer_expire key %d %d\n", gpio_desc->gpio, val);key = (gpio_desc->key) | (val<<8);put_key(key);wake_up_interruptible(&gpio_wait);kill_fasync(&button_fasync, SIGIO, POLL_IN);return IRQ_HANDLED;
}/* 在入口函数 */
static int __init gpio_drv_init(void)
{int err;int i;int count = sizeof(gpios)/sizeof(gpios[0]);printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);for (i = 0; i < count; i++){ gpios[i].irq = gpio_to_irq(gpios[i].gpio);err = request_irq(gpios[i].irq, gpio_key_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, gpios[i].name, &gpios[i]);}/* 注册file_operations */major = register_chrdev(0, "100ask_gpio_key", &gpio_key_drv); /* /dev/gpio_desc */gpio_class = class_create(THIS_MODULE, "100ask_gpio_key_class");if (IS_ERR(gpio_class)) {printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);unregister_chrdev(major, "100ask_gpio_key");return PTR_ERR(gpio_class);}device_create(gpio_class, NULL, MKDEV(major, 0), NULL, "sr501"); /* /dev/sr501 */return err;
}/* 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数*/
static void __exit gpio_drv_exit(void)
{int i;int count = sizeof(gpios)/sizeof(gpios[0]);printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);device_destroy(gpio_class, MKDEV(major, 0));class_destroy(gpio_class);unregister_chrdev(major, "100ask_gpio_key");for (i = 0; i < count; i++){free_irq(gpios[i].irq, &gpios[i]);}
}/* 7. 其他完善:提供设备信息,自动创建设备节点 */module_init(gpio_drv_init);
module_exit(gpio_drv_exit);MODULE_LICENSE("GPL");
啊破东西到底怎么配置才能精准啊,不是永远测不到人就是哪里都是人。
彻底疯狂了

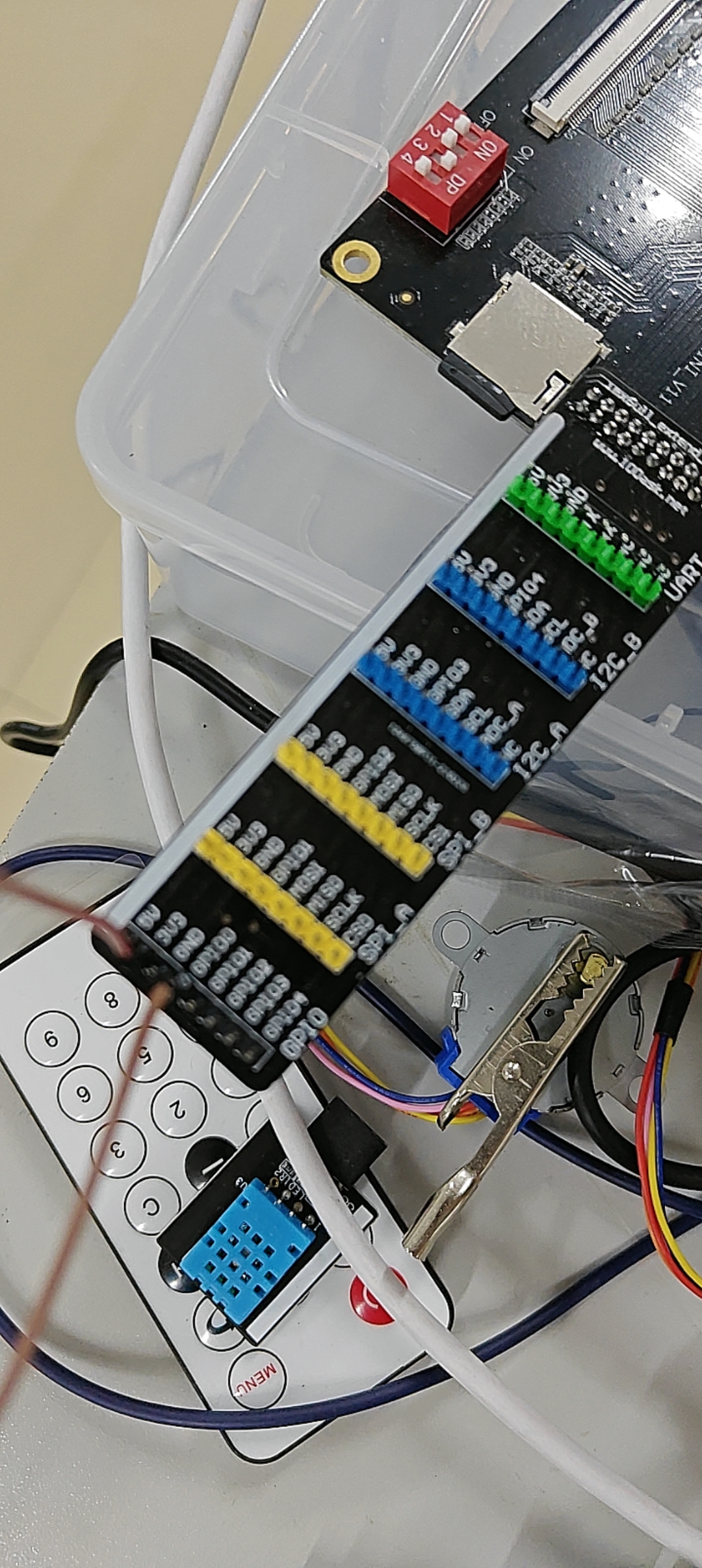
还是导线好使