视觉基础模型的三维意识:前沿探索与局限
- 一、引言
- 二、视觉基础模型的三维意识
- 三、当前模型的局限性
- 四、实验与结果
- 五、总结与展望
大规模预训练的进展已经产生了具有强大能力的视觉基础模型。最近的模型不仅可以推广到任意图像的训练任务,而且它们的中间表示对于其他视觉任务(如检测和分割)也很有用。 考虑到这些模型可以在2D中对物体进行分类、描绘和定位,论文尝试它们是否也代表3D结构,分析了视觉基础模型的三维意识。
一、引言
随着人工智能技术的飞速发展,大规模预训练模型已成为当今科技领域的热点话题。特别是视觉基础模型,它们不仅能够在2D图像中出色地完成各种任务,而且其内部表示也在其他视觉任务中展现出巨大的潜力。*然而,当我们将这些模型应用于3D世界时,它们是否同样具备深度感知的能力呢?*本文旨在探讨视觉基础模型的三维意识,并通过实例代码展示其在这一领域的应用和局限性。
二、视觉基础模型的三维意识
在探讨视觉基础模型的三维意识之前,我们先明确一点:3D感知意味着模型能够对场景的3D结构进行编码,并跨视图一致地表示真实世界的物体。
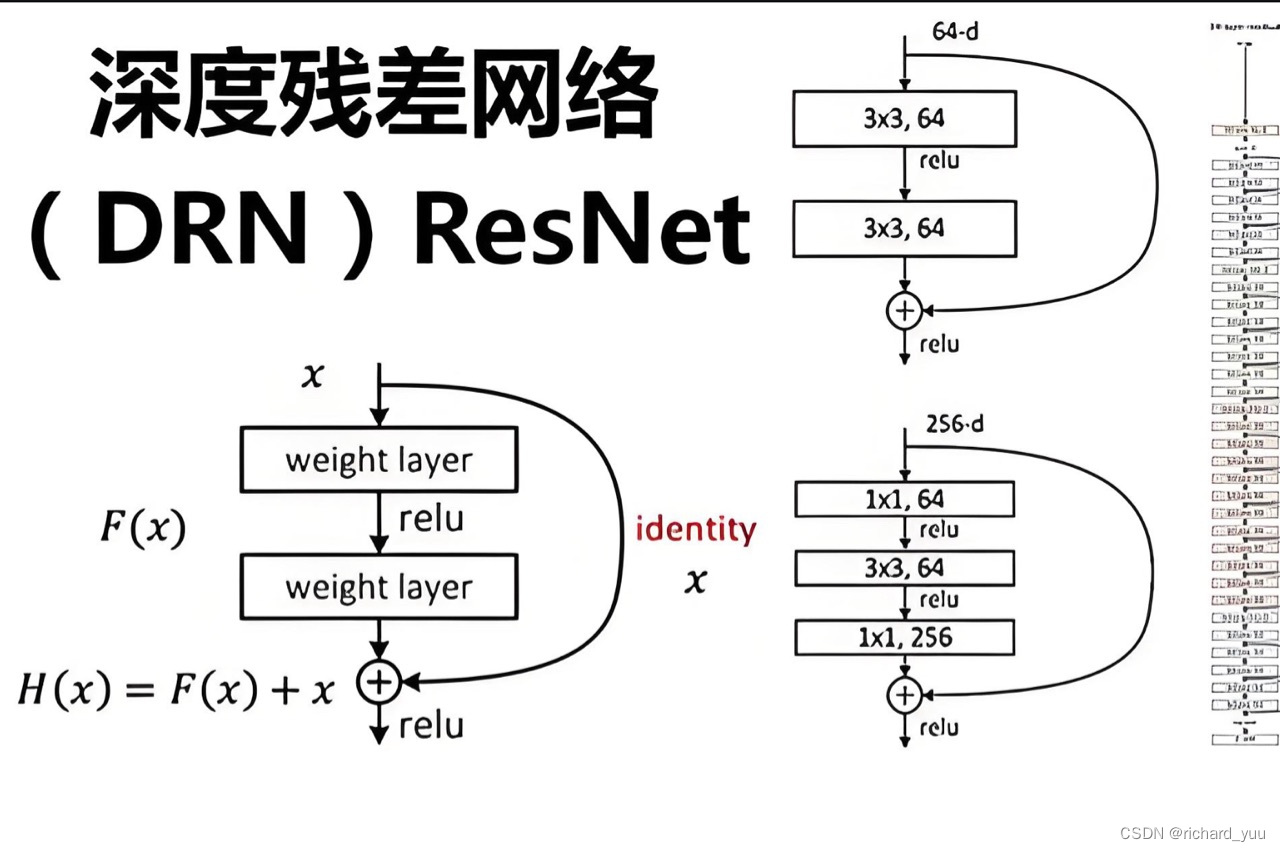
为了实现这一目标,研究者们设计了一系列实验,其中一个关键步骤是通过特定的3D感知层来增强视觉基础模型的能力。以下是一个简化的代码实例,展示了如何为ResNet模型添加这样的层。
pythonimport torch
import torch.nn as nn
from torchvision.models import resnet50# 加载预训练的ResNet模型
base_model = resnet50(pretrained=True)# 移除ResNet的最后一层全连接层(分类层)
base_model.fc = nn.Identity()# 定义一个简单的3D感知层
class Simple3DPerceptionLayer(nn.Module):def __init__(self, input_dim, output_dim):super(Simple3DPerceptionLayer, self).__init__()self.fc = nn.Linear(input_dim, output_dim)def forward(self, x):return self.fc(x)# 假设我们有一个特定于任务的输出维度
task_output_dim = 1024 # 例如,这可能对应于某个3D重建任务的维度# 初始化3D感知层
three_d_perception_layer = Simple3DPerceptionLayer(base_model.fc.in_features, task_output_dim)# 将新的3D感知层添加到模型中
model = nn.Sequential(base_model, three_d_perception_layer)# 假设我们有一个输入图像
# input_tensor 是一个形状为 [batch_size, 3, height, width] 的张量
# 在这里,我们仅为了示例而创建一个随机的输入张量
input_tensor = torch.randn(1, 3, 224, 224)# 通过模型进行前向传播
output = model(input_tensor)
print(output.shape) # 输出应该是 [batch_size, task_output_dim]
上述代码提供了一个简化的示例,展示了如何为预训练的ResNet模型添加一个3D感知层。然而,请注意,这只是一个起点,实际的3D感知层可能会更加复杂,并可能涉及到多视图几何、深度估计或其他高级技术。
三、当前模型的局限性
尽管上述代码展示了如何为模型添加3D感知能力,但当前的视觉基础模型在3D感知方面仍然面临许多挑战和限制。例如,模型可能无法很好地处理遮挡和复杂场景,或者在理解场景语义方面存在不足。
四、实验与结果
为了更深入地了解这些局限性,研究者们通常会在大型数据集上进行实验。这些实验可能涉及多个视图下的图像,以及与之相关的3D标签(如深度图、点云或3D模型)。通过在这些数据集上训练和评估模型,研究者们可以量化地评估模型的3D感知能力,并发现其中的问题和改进空间。
五、总结与展望
本文探讨了视觉基础模型的三维意识及其在3D感知方面的应用和局限性。通过实例代码和实验结果的展示,我们可以看到当前模型在这一领域已经取得了一定的进展,但仍然存在许多挑战和限制。未来的研究可以从多个方面入手,如改进模型的架构、引入更复杂的3D感知层、利用多视图几何信息以及增强场景语义理解等,以进一步推动视觉基础模型在3D感知领域的发展和应用。