目录
一、引言
二、Apollo七周年大会主要内容回顾
2.1活动回顾链接
2.2Apollo项目介绍
2.2.1Apollo项目发展介绍
2.2.2实验用车传感器介绍
2.2.3硬件连接概述
2.2.4软件概述
2.3Apollo X 企业自动驾驶解决方案介绍
2.3.1Apollo X 企业自动驾驶解决方案优势
2.3.2 Application X企业预制套件
2.2.3Studio X企业协同工具链
2.4Apollo开放平台生态介绍
三、Apollo云实验体验
3.1 云实验链接
3.2 实验介绍
3.2.1 实验简介
3.2.2 实验目的
3.2.3 前置条件
3.2.4 实验任务
3.3实验流程
四、结语
一、引言
我本人是做无人机航迹规划相关研究的,最近有幸线上参与了”Apollo七周年大会“,通过这次大会了解到了百度Apollo团队在自动驾驶技术上最新的成果以及Apollo已经在哪些行业获得了落地。下面我就以一名通信人的角度分享一下这次大会的主要内容和自己的一些心得及收获。
二、Apollo七周年大会主要内容回顾
2.1活动回顾链接

Apollo开放平台企业生态计划_Apollo开发者社区
2.2Apollo项目介绍
2.2.1Apollo项目发展介绍

Apollo是百度公司自主研发的一种高性能、灵活的架构,可加速自动驾驶汽车的开发、测试和部署。看到Apollo大家肯定会联想到人类第一次登月的Apollo 11,这是美国国家航空航天局的阿波罗计划(Project Apollo)中的第五次载人任务,是人类第一次登月任务,这次任务的成功极大的激发了人类对探索宇宙的激情与创造力。所以百度的 Apollo项目作为自动驾驶领域的先行者,我感觉可以说是国内最早的"自动驾驶领域"的载人登月计划。
上面是Apollo项目在GitHub的项目源码首页,源码网页链接如下:
GitHub - ApolloAuto/apollo: An open autonomous driving platform
目前这个项目已经获得了24.5K个star,可以说这个项目已经得到了广泛的使用,并且具有很大的影响力,下面简单介绍一下这个项目的发展历史。

这个项目到2023年12月止已经推出了14个版本:
Apollo 1.0,也称为自动 GPS 航点跟踪,在封闭的场地(例如测试跑道或停车场)工作。
Apollo 1.5 适用于固定车道巡航。通过添加激光雷达,该版本的车辆现在可以更好地感知周围环境,并可以更好地绘制当前位置并规划其轨迹,以便在车道上更安全地操纵。
Apollo 2.0支持车辆在简单的城市道路上自动驾驶。车辆能够在道路上安全行驶、避免与障碍物碰撞、在红绿灯处停车以及在需要时变换车道以到达目的地。
Apollo 2.5 允许车辆在地理围栏高速公路上自动行驶,并带有用于障碍物检测的摄像头。车辆能够保持车道控制、巡航并避免与前方车辆发生碰撞。
Apollo 3.0 的主要重点是为开发者提供一个在封闭场地低速环境中进行开发的平台。车辆能够保持车道控制、巡航并避免与前方车辆发生碰撞。
Apollo 3.5能够在住宅区、市中心等复杂驾驶场景中进行导航。该汽车现在拥有 360 度可视性,以及升级的感知算法来应对城市道路不断变化的状况,使汽车更加安全和感知。基于场景的规划可以应对复杂的场景,包括住宅区常见的无保护转弯和狭窄街道以及带有停车标志的道路。
Apollo 5.0 是支持地理围栏自动驾驶量产的努力。该车现在拥有360度可视性,并升级感知深度学习模型,以应对复杂道路场景的变化情况,使汽车更加安全和感知。基于场景的规划得到了增强,以支持其他场景,例如靠边停车和穿越裸露的十字路口。
Apollo 5.5通过引入路边驾驶支持,增强了之前Apollo版本的复杂城市道路自动驾驶能力。有了这一新功能,阿波罗现在距离全自动城市道路驾驶又近了一步。汽车拥有完整的360度可视性,同时升级感知深度学习模型和全新的预测模型,以应对复杂道路和路口场景的变化情况,使汽车更加安全和感知。
Apollo 6.0 融入了新的深度学习模型,以增强某些 Apollo 模块的功能。该版本与新增的数据管道服务无缝协作,以更好地为 Apollo 开发人员服务。 Apollo 6.0也是第一个集成某些功能的版本,展示了百度阿波罗团队对无人驾驶技术不断探索和实验的努力。
Apollo 7.0融合了3个全新的深度学习模型,增强Apollo感知和预测模块的能力。该版本引入Apollo Studio,结合Data Pipeline,提供一站式在线开发平台,更好地服务Apollo开发者。 Apollo 7.0还在前期仿真服务的基础上发布了PnC强化学习模型训练和仿真评估服务。
Apollo 8.0致力于为自动驾驶开发者提供可扩展的软件框架和完整的开发周期。 Apollo 8.0引入了易于重用的“包”来组织软件模块。 Apollo 8.0通过结合模型训练服务、模型部署工具和端到端视觉验证工具,整合了感知开发的全流程。 Apollo 8.0 的感知模块中还引入了另外 3 个新的深度学习模型。模拟服务升级,在Dreamview中集成本地模拟器,为PnC开发者提供强大的调试工具。
Apollo开源平台9.0进一步专注于增强开发和调试体验,致力于为自动驾驶开发者提供统一的开发工具平台和易于扩展的PnC和感知软件框架接口。新版本重塑了基于包管理的PnC和感知扩展开发方式。根据业务逻辑优化组件拆分和配置管理,简化调用流程。除了组件扩展方式之外,还增加了更加轻量级的插件扩展方式,简化了扩展的过程。新版本引入了全新的开发者工具Dreamview Plus,引入了便捷的多场景使用模式、定制可视化的面板布局以及提供更丰富开发资源的资源中心。此外,新版本对LiDAR和Camera检测模型进行了升级,提升了效果,并开放了增量训练方法,方便扩展。同时增加了对4D毫米波雷达的支持。最后,新版本适配了ARM架构,并支持在Orin上编译和运行,为开发者提供了额外的设备选择。
2.2.2实验用车传感器介绍
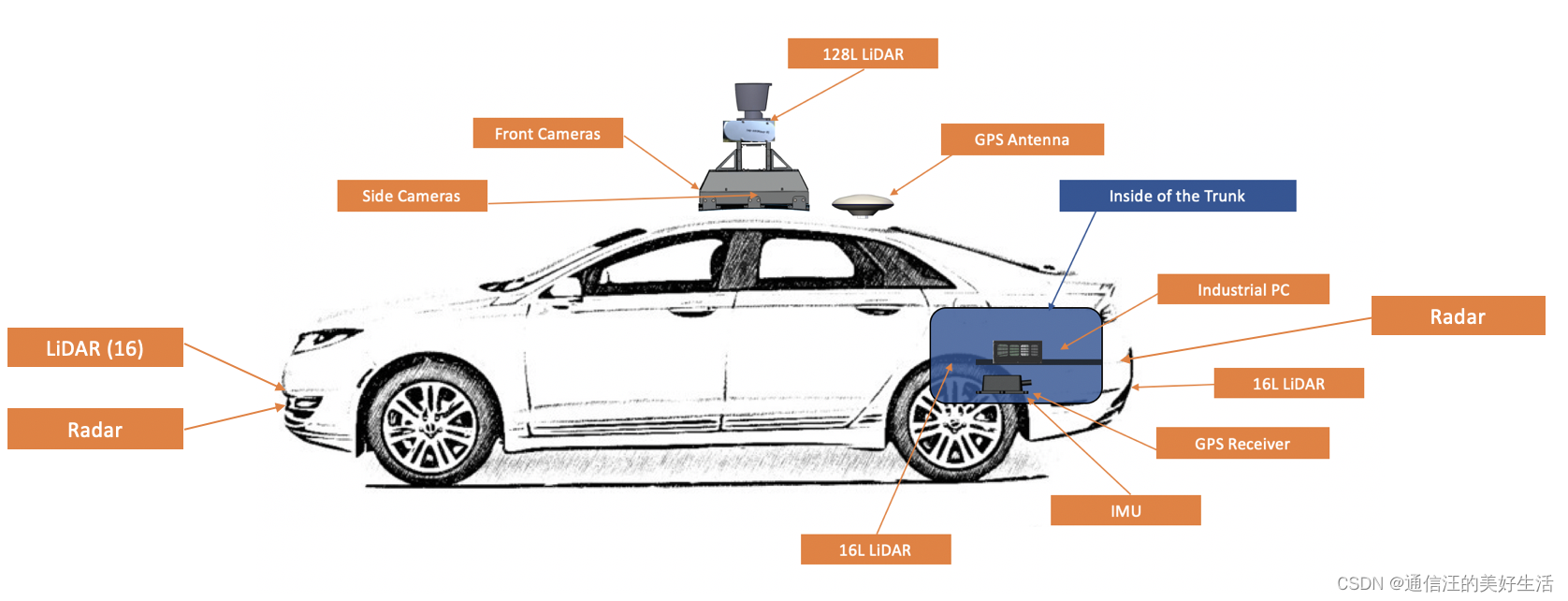
上面这个车便是Apollo 实验用车所具有的传感器,可以看出基本包含了市面上所有比较先进传感器。
2.2.3硬件连接概述
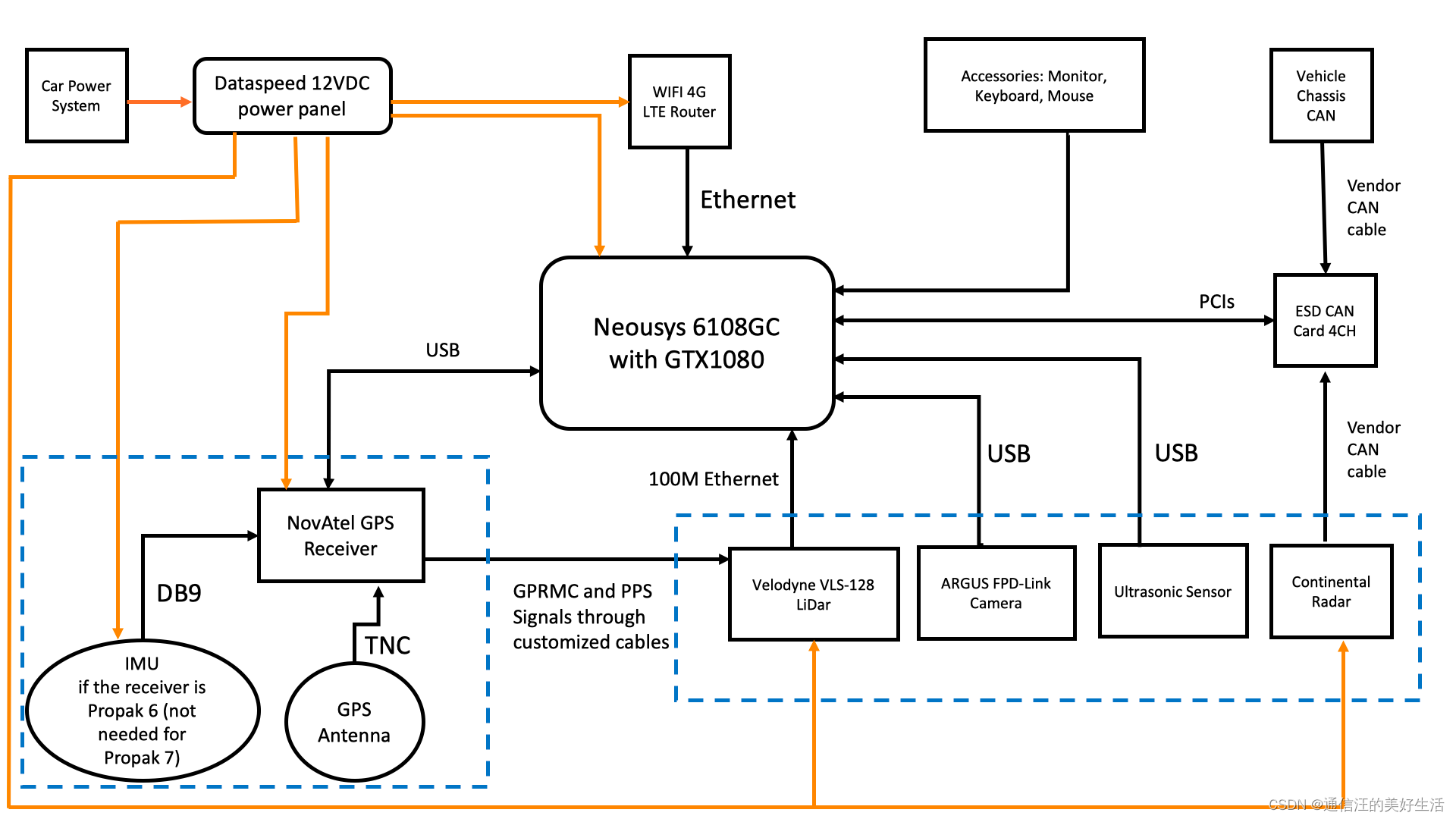
通过上图可以看出,阿波罗的车载传感器是极其丰富的,并且通过上一部分的平台发展历史可以看出,通过这个平台已经初步具备了复杂环境的自动驾驶能力。
2.2.4软件概述

通过上图可以看出,阿波罗软件设计可分为:预测、规划、决策与执行这么几个模块,在执行预测、决策和规划的时候要利用到车载硬件获取到的周围环境地图以及车辆的实时位置信息,以方便进行更加精确和安全的驾驶。
2.3Apollo X 企业自动驾驶解决方案介绍
从2017年4月的Apollo 1.0到2023年12月的Apollo 9.0,历经七年的不懈追求与创新,Apollo开放平台已陆续推出了13个版本,汇聚了来自全球170多个国家与地区的16万名开发者及220多家合作伙伴。七年间,我们与众多合作伙伴及开发者携手并进,共同见证了Apollo开放平台跨越式成长。
2.3.1Apollo X 企业自动驾驶解决方案优势
Apollo X企业解决方案是一套专为企业客户量身定制的方案,它包括了Application X企业预制套件和Studio X企业协同工具链,旨在帮助企业快速实现自动驾驶产品的自研与落地。


2.3.2 Application X企业预制套件
场景集定义:覆盖多ODD(Operational Design Domains)与多样化的作业流程需求,从快递配送到矿区运载,从园区接驳到道路清扫,我们提供丰富的场景用例。
软件包:结合Cyber RT自动驾驶框架和多源融合定位技术,提升定位的稳定性和适用性,确保企业产品的高性能与可靠性。


2.2.3Studio X企业协同工具链
功能研发工具:提供从算法开发到车辆动力学模拟的全套工具,支持快速迭代和仿真测试。
实车闭环工具:通过实车模式、状态监测和版本管理,实现从研发到实车测试的无缝对接
数据管理工具:智能采集、数据挖掘和标注管理,为模型算法迭代提供强有力的数据支持。
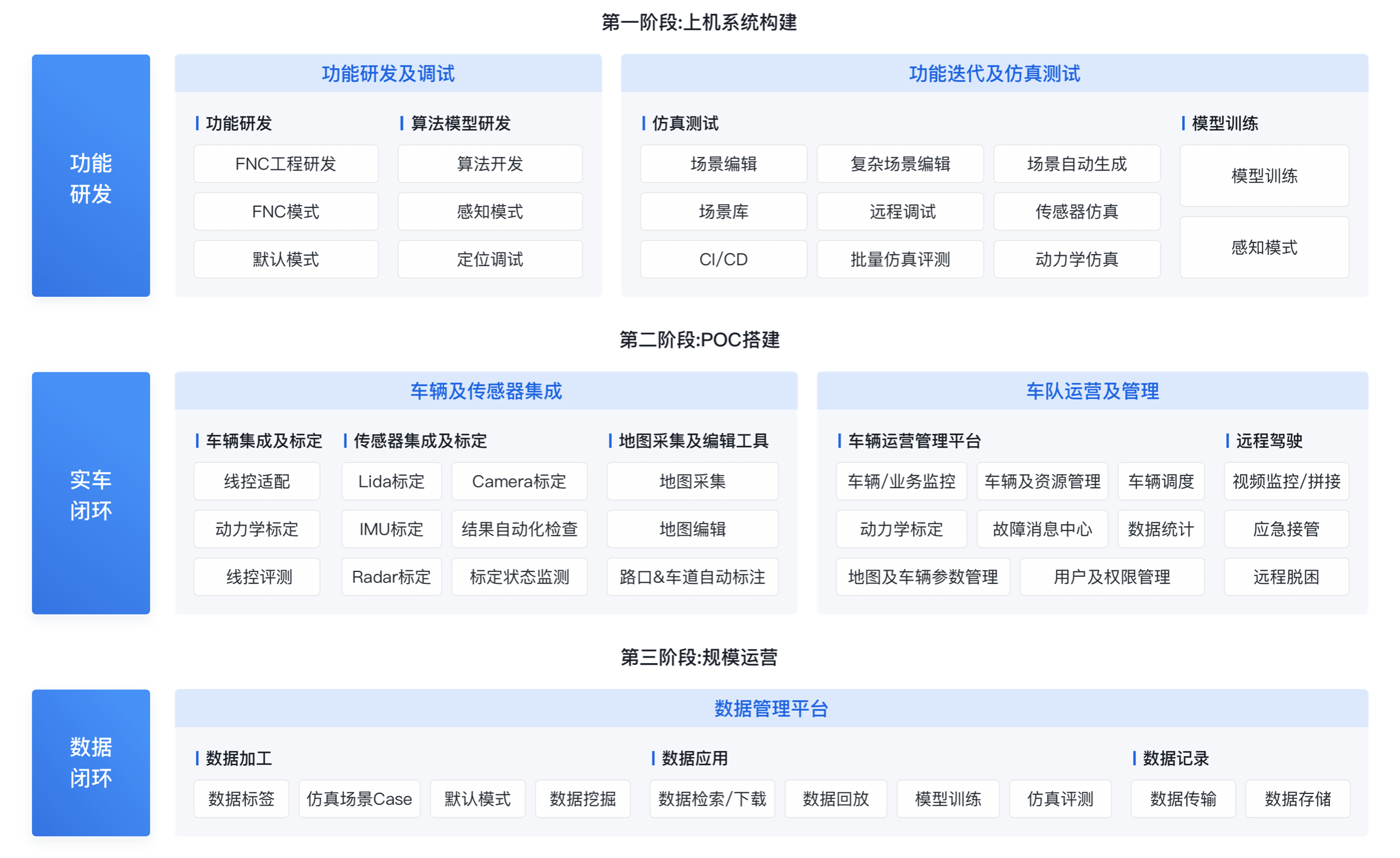
Apollo X 企业自动驾驶解决方案,专为企业自动驾驶产品开发而设计。集成了多场景的Application X套件和全周期的Studio X工具链,从算法开发到实车测试,提供一站式支持。这一方案以高性能和可靠性为核心,助力企业快速实现自动驾驶技术的商业化落地,推动智能化未来。Apollo X 企业自动驾驶解决方案,加速企业场景应用落地
2.4Apollo开放平台生态介绍
Apollo开放平台秉承其核心理念——开放能力、共享资源、加速创新、持续共赢,致力于推动自动驾驶技术的革新与发展。通过开源协作,我们降低了技术门槛,促进了广泛的技术共识,并针对企业需求和人才培养提供了全面的商业解决方案,通过共享资源和能力,激励开发者参与共建,有效连接市场需求。这一切成就都源自我们与生态伙伴的紧密合作。为了深化并持续推进生态共创合作,我们在现有伙伴关系基础上,推出了全新的共创会员伙伴计划。加入共创会员合作伙伴将有机会一起分享到广阔的商业市场机遇,同时也需要反哺社区,与我们一起共建生态根基。我们相信,通过这样的共创合作,Apollo开放平台将能够与社区成员一起,实现技术的突破,推动整个自动驾驶生态系统的发展。


共创会员计划旨在与合作伙伴共享市场机遇,实现共赢发展。作为会员,您将获得包括优先技术访问、决策参与和定制支持在内的专属权益。同时,会员需履行缴纳会费和为社区贡献的义务,如代码编写、硬件测试或提供服务。我们期待您的积极参与,共同推动共创会员计划的成功。在这里你能获得:
能力赋能:获得企业培训和行业交流活动的机会。
社区共建:参与定期的圆桌会议,拥有项目提案权。
商机共享:有机会加入Apollo商业解决方案货架,参与商业项目。
营销共享:参与Apollo主办的行业会议,官网logo展示,媒体发布,人才招聘等。
三、Apollo云实验体验
3.1 云实验链接
在大会结束后,动手体验了Apollo学习平台上面的Apollo规划之路径规划仿真实验,链接如下:
Apollo规划之路径规划仿真调试(9.0)_Apollo课程 (baidu.com)
3.2 实验介绍
3.2.1 实验简介
路径规划是Apollo规划中重要的一个模块,它根据参考线规划车辆行驶的路径。本实验根据自车道行驶、车道内绕行,借道绕行等场景为例,观察车辆行驶过程中规划路径边界及规划的路径曲线,并通过调整路径规划的参数,加深了解路径规划的原理和参数的作用,进而对Apollo的路径规划有一个更深入的了解。
3.2.2 实验目的
通过运行Planning模块,观察路径规划的效果,调整路径规划的参数,加深对路径规划的了解。
3.2.3 前置条件
本实验需要请您对Planning模块有一定的概念和了解,能够在Dreamview_plus中运行场景仿真工具。
3.2.4 实验任务
运行不同仿真场景,观察规划的路径及路径边界;修改路径规划参数,观察自动驾驶车辆规划的路径变化。
3.3实验流程
在终端中,执行DreamView启动指令,执行成功后,点击菜单栏dreamview按钮,进入dreamview
aem bootstrap start --plus

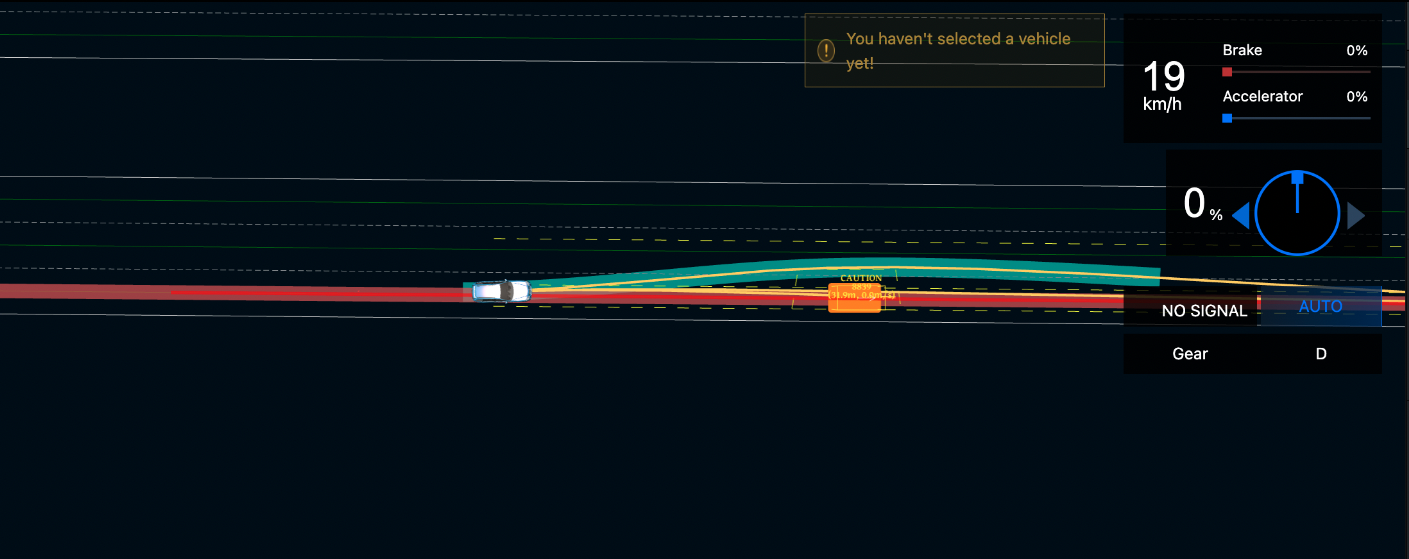
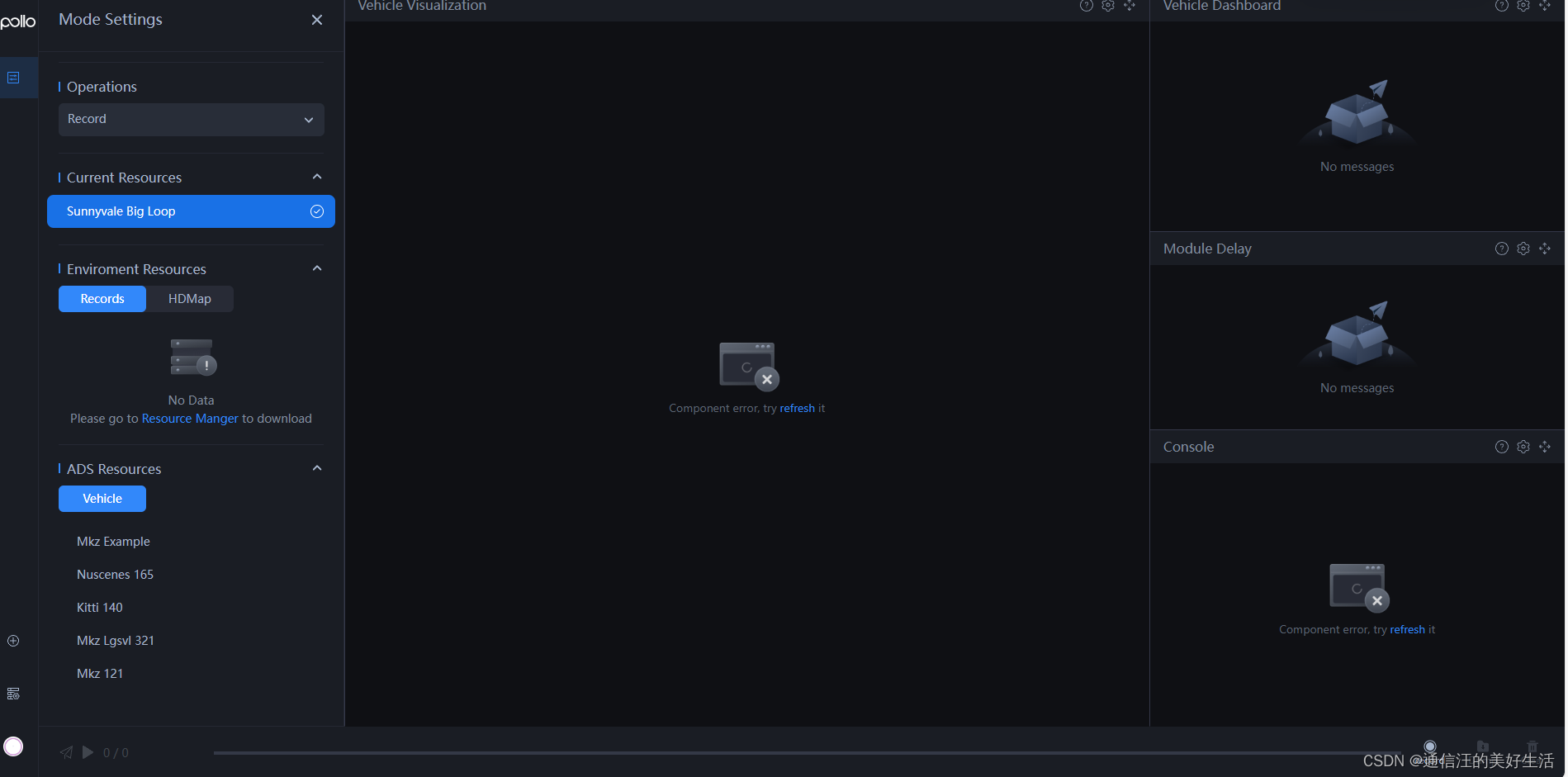
成功打开后的界面如下:
按照我下图左侧进行仿真参数设置,然后点击左下角的三角标志,即开始仿真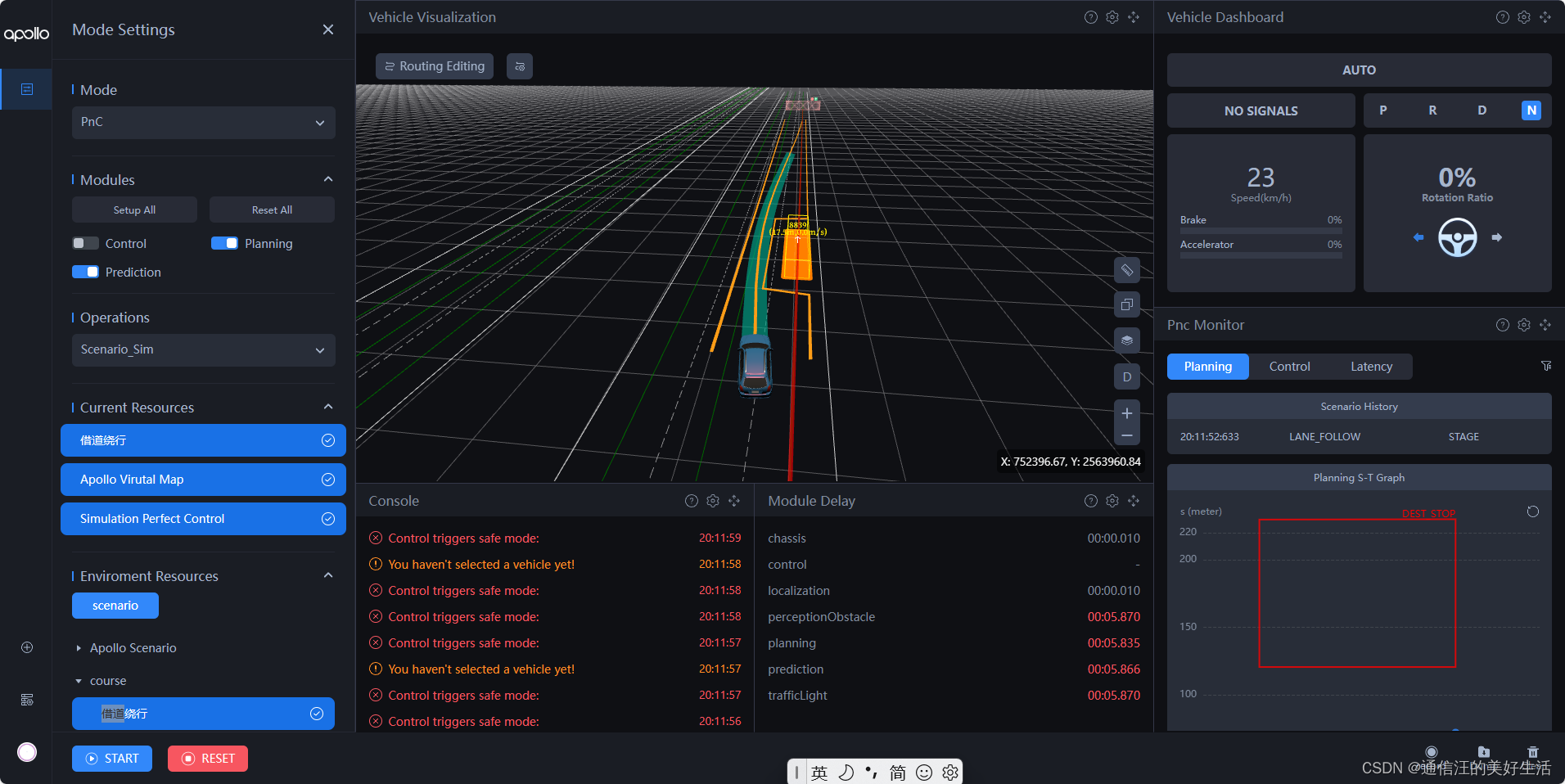
仿真的结果见下面视频:
20240506_202235
四、结语
Apollo 7周年大会不仅是对过去历程的总结和展示,更是对未来愿景的规划和期待。Apollo通过持续的技术升级、生态建设和人才培养,已经成为了链接全球自动驾驶开发者和企业的桥梁。通过这次学习我深刻意识到了技术是在如此迅猛的发展,相信在不就的将来我们一定可以像阿波罗计划实现载人登月那样,实现L5级别的自动驾驶。未来,我们有理由相信Apollo将继续在自动驾驶的大道上行稳致远,引领行业走向更加智能、高效和安全的明天。