写的乱糟糟,主要是这两周忘了记录了...吭哧吭哧往下搞,突然想起来要留档,先大致写一个,后面再往里添加和修改吧,再不写就全忘了
有一个一直没解决的问题:
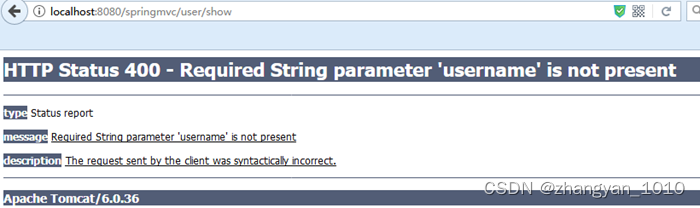
在保存文件时出现问题:isaac sim mismatched units found on drag and drop ,resolved in current authoring layer path:(表现为文件无法放置)
出现原因:单位不匹配
在NVIDIA论坛中的解决方式,但我试了没成功:
1.左上方导航栏,Edit—Preferences,红圈中的0.01改为1.0

一.键盘控制小车前进
以下步骤不限完成顺序,都做完就行
1.新建一个二驱示例小车
路径为Robot-Jetbot(如果找不到也可以直接搜索Jetbot,能查到)
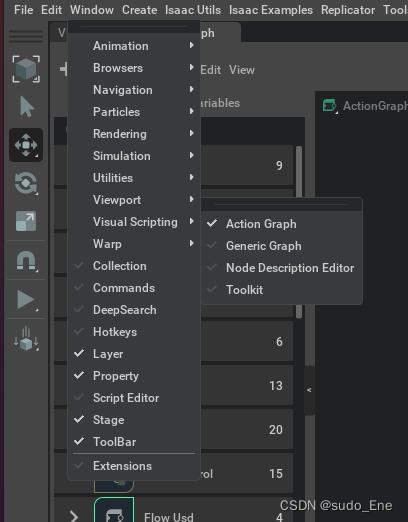
2.添加Action Graph
导航栏中:Window - Visual Scripting - Action Graph,建立一个工作区,这个工作区中主要是用来做键盘控制的。点击New Action Graph
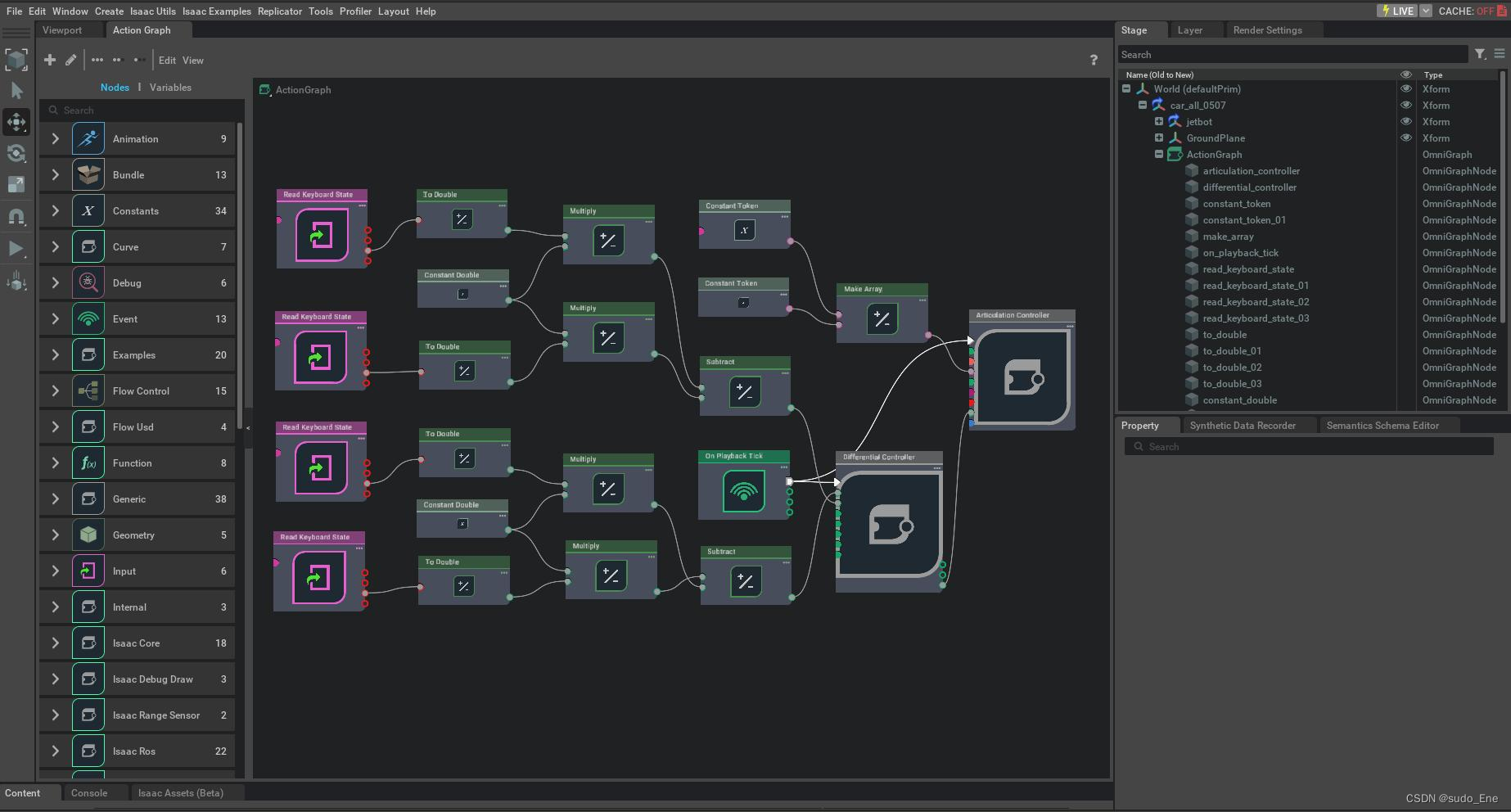
3.键盘控制
新建以下内容,左侧四个紫色的分别是四个键盘控制按键,上到下分别为控制前后,控制左右。从上到下我分别将键位修改为了WSDA。

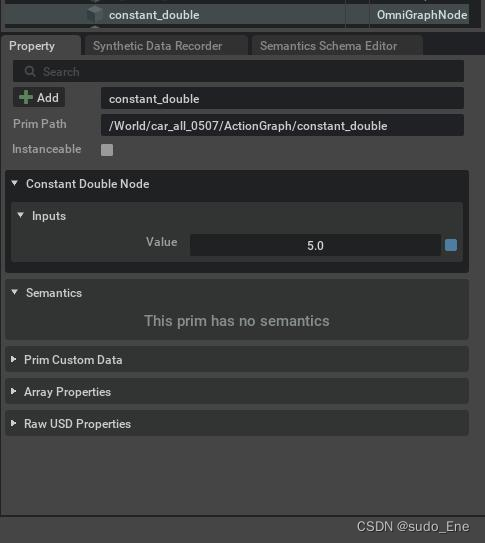
4.修改速度
在constant_double中可以修改速度(前进速度,转角速度等,这里我从5.0修改为了20.0,嫌弃它开的慢)
5.修改其它行驶参数
differential_controller中修改为:

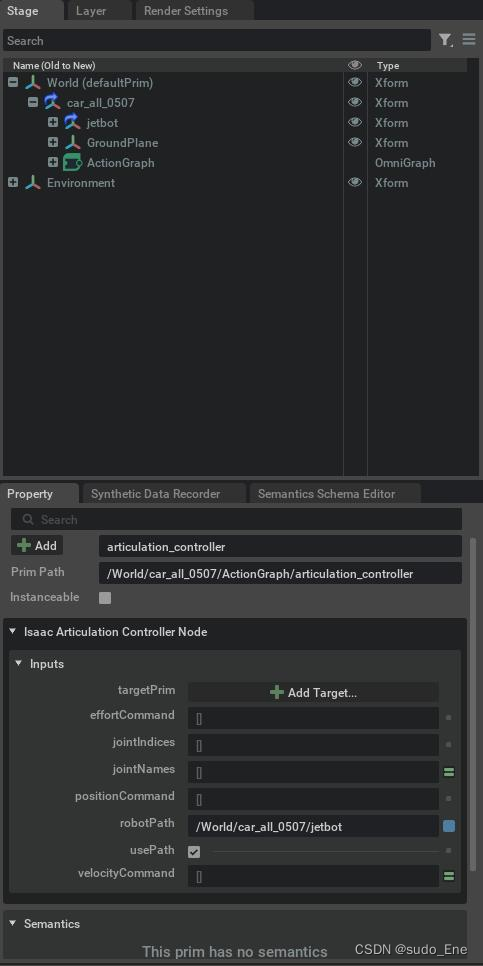
6.设置目标小车路径
修改articulation_controller中robotPath为jetbot的路径
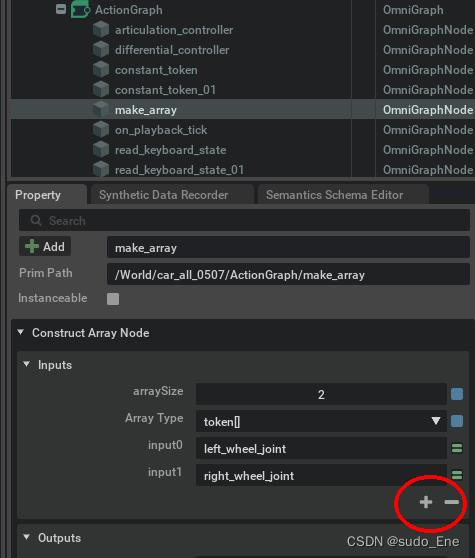
7.设置两个小轮
Make Array中,点击这个加号就能增加输入端。这里input不能输入,
在连接的两个Constant Token中,分别添加left_wheel_joint和right_wheel_joint,make array中就能显示了
8.控制小车前进方向
回到Viewport界面中,点击运行,可以通过键盘来控制小车前进方向。