个人主页:东洛的克莱斯韦克-CSDN博客
祝福语:愿你拥抱自由的风
目录
二叉搜索树
AVL树概述
平衡因子
旋转情况分类
左单旋
右单旋
左右双旋
右左双旋
AVL树节点设计
AVL树设计
详解单旋
左单旋
右单旋
详解双旋
左右双旋
平衡因子情况如下
右左双旋
平衡因子情况如下
二叉搜索树
【C++】详解二叉搜索树-CSDN博客
AVL树概述
平衡树:左子树的高度等于右子树的高度
不平衡树:左子树的高度不等于等于右子树的高度
二叉搜索树很难是一颗平衡树。
对二叉树进行插入和删除的操作,或插入大量的数据不够随机,都会是使二叉搜索树不够平衡。
极端情况下,二叉树会退化成类似链表的结构,那么二叉搜索树查询数据的效率荡然无存。
在二叉树的基础上加入平衡的概念就是平衡二叉搜索树,也叫AVL树。
AVL树也不是一颗绝对的平衡树,AVL树的平衡是相对的,它允许左子树和右子树的高度为 1 ,但不能超过 1 。
平衡是相对的很好理解,因为一个父亲节点最多只能有两个孩子节点,而数据又是一个一个插入的,所以一定会出现左子树和右子树高度差为 1 的情况。
B树可达到绝对平衡,因为B树是多叉结构——一个父亲节点有多个孩子节点
如果左子树和右子树的高度差为 2 ,就视为打破平衡。
如果打破平衡,就需要通过旋转这一操作让左右子树的高度差小于等于 1 。
AVL树是保持一种相对平衡的状态,而不是绝对平衡。那么AVL树搜索数据的效率只能是接近。
AVL树只是保证了搜索效率的下限,而不是提高了上限
平衡因子
平衡因子这一概念并不是AVL树所必备的——从代码实现的角度来说,如果不加入平衡因子的概念理解起来会比较抽象。
平衡因子:让每个节点存一个整型,该整形值的大小等于右子树的高度减左子树的高度
平衡因子等于 0 :左右子树平衡
平衡因子等于 1 :左右子树相对平衡,右树偏高
平衡因子等于 -1 :左右子树相对平衡,左树树偏高
平衡因子等于 2 或 -2 :左右子树不平衡
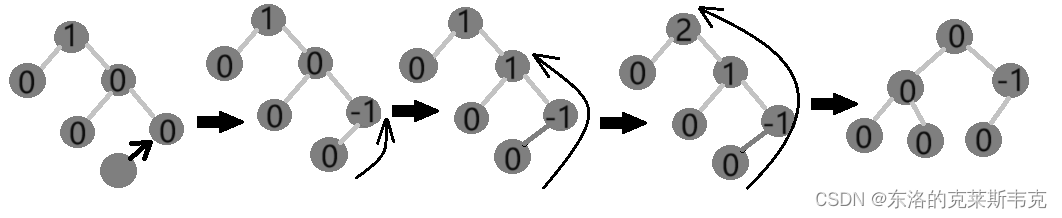
平衡因子的更新:
插入父亲节点的右边平衡因子加加,插入父亲节点的右边平衡因子减减,
父亲节点更新后的平衡因子等于 1 或 -1 ,需要不断往上(溯源)更新,直到父亲节点的平衡因子为 0 或 更新至整棵树的根节点就停止更新。
如果父亲节点的平衡因子为 2 或 -2 时,需要对这棵子树旋转,旋转后更新平衡因子
示例
旋转情况分类
旋转分为:
左单旋 右单旋 左右双旋 右左双旋
左单旋
:新节点插入较高右子树的右侧
具象图:

抽象图:

那么左单旋是怎么旋的呢?核心步骤为:
设父亲节点为:fathernode 孩子节点为:cur
让cur的左孩子成为fathernode的右孩子,
再让fathernode成为cur的左孩子。
如下示意图

右单旋
:新节点插入较高左子树的左侧
具象图:

抽象图:

那么右单旋是怎么旋的呢?核心步骤为:
设父亲节点为:fathernode 孩子节点为:cur
让cur的右孩子成为fathernode的左孩子,
再让fathernode成为cur的右孩子
如下示意图:

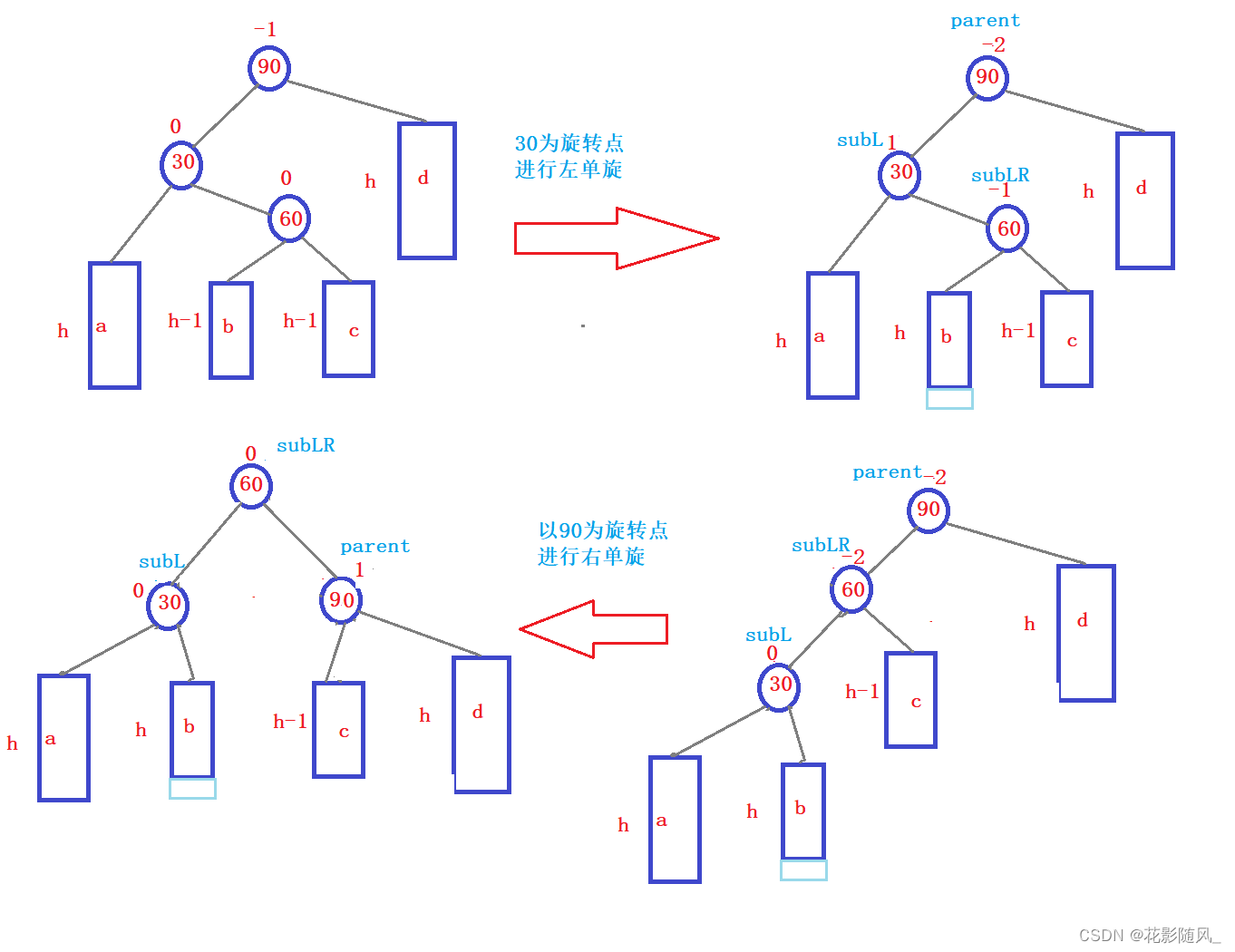
左右双旋
:新节点插入在较高左子树的右侧——先左单旋再右单旋
左右双旋的核心步骤为:
设父亲节点为:fathernode
父亲的左孩子节点为:fathernodeL
父亲的左孩子节点的右孩子节点的为fathernodeLR
先让fathernodeL左单旋,再让fathernodeLR进行右单旋
这里小编直接上抽象图:

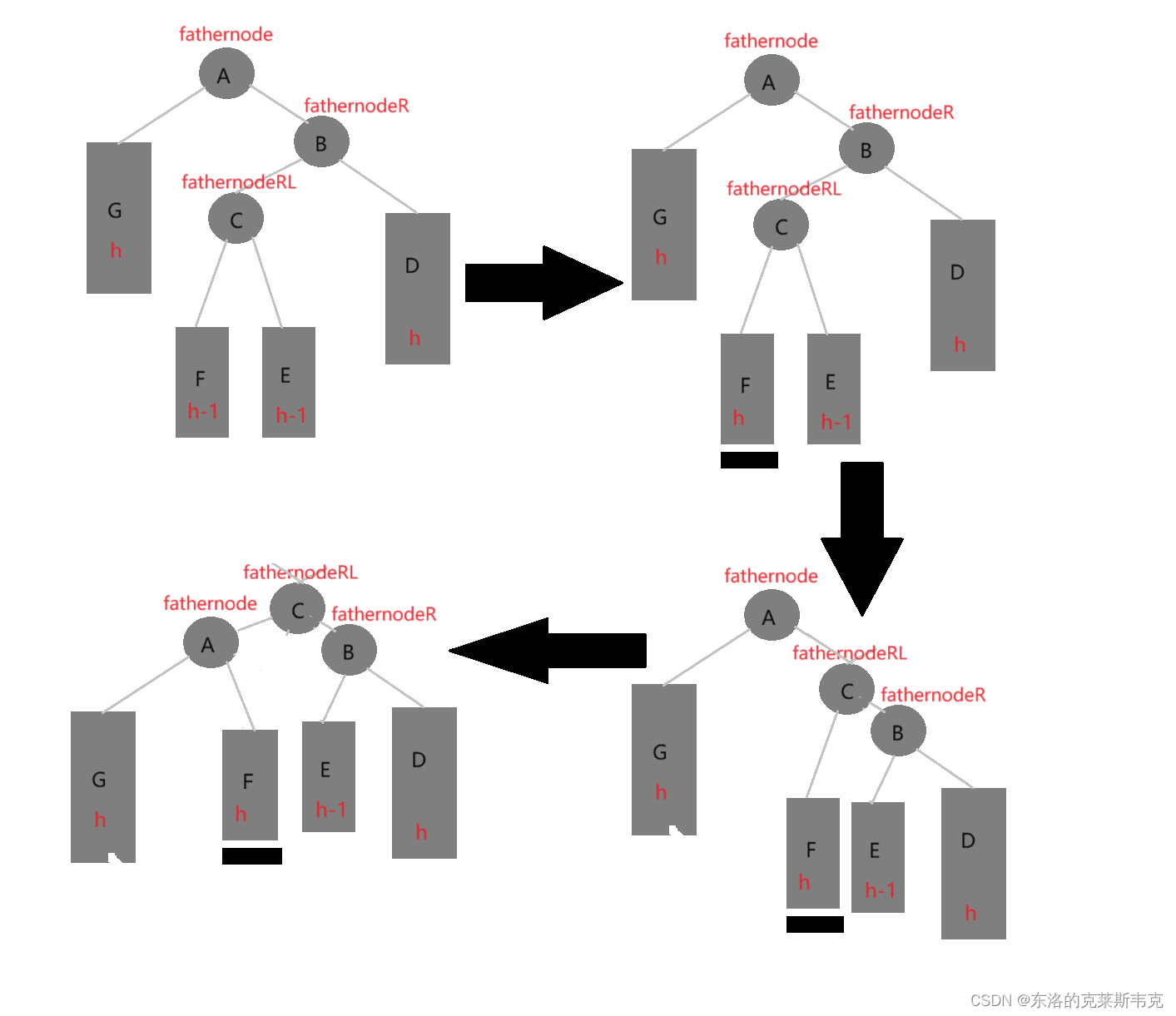
右左双旋
:新节点插入再较高右子树的左侧——先右单旋再左单旋
设父亲节点为:fathernode
父亲的 右孩子节点为:fathernodeR
父亲的右孩子节点的左孩子节点的为fathernodeRL
先对fathernodeR进行右单旋,再对fathernode进行左单旋。
示意图:
AVL树节点设计
【C++】详解C++的模板-CSDN博客
AVL树的节点需要三个指针,分别指向左孩子节点,右孩子节点,父亲节点。指向父亲节点的指针是为了能溯源更新平衡因子。
需要一个整型存储平衡因子,平衡因子在构造函数的初始化列表中初始化为 0,因为新节点左右孩子都为空。
template <class K>
class AVLTreeNode
{
public:AVLTreeNode(const K& key) //构造函数:_key(key), _left(nullptr), _right(nullptr), _FatherNode(nullptr), _bf(0){}K _key; //键值 AVLTreeNode<K>* _left;//左孩子AVLTreeNode<K>* _right;//右孩子AVLTreeNode<K>* _FatherNode;//父亲 int _bf;//平衡因子};AVL树设计
template <class K>
class AVLTree
{typedef AVLTreeNode<K> node; node* _root;public:AVLTree() //构造函数,初始化为空树:_root(nullptr){}bool Insert(const K& key)//插入元素{
//if (nullptr == _root) //是否是空树{_root = new node(key); return true;}
//node* cur = _root;node* fathernode = nullptr;while (cur) //查找插入的位置,如果树中已经有要插入的值,则插入失败,{if (cur->_key < key){fathernode = cur;cur = cur->_right;}else if (cur->_key > key){fathernode = cur;cur = cur->_left;}else{return false;}}cur = new node(key); //新插入节点 if (fathernode->_key < cur->_key) //判断新节点应该是左孩子还是右孩子{fathernode->_right = cur;cur->_FatherNode = fathernode;}else{fathernode->_left = cur;cur->_FatherNode = fathernode;}//while (fathernode)//更新平衡因子{if (cur == fathernode->_left){fathernode->_bf--;}else if (cur == fathernode->_right){fathernode->_bf++;}//if (fathernode->_bf == 0){// 更新结束break;}else if (fathernode->_bf == 1 || fathernode->_bf == -1){// 继续往上更新cur = fathernode;fathernode = fathernode->_FatherNode;}else if (fathernode->_bf == 2 || fathernode->_bf == -2){// 子树不平衡了,需要旋转if (fathernode->_bf == 2 && cur->_bf == 1){RevolveLeft(fathernode);//左单旋}else if (fathernode->_bf == -2 && cur->_bf == -1){RevolveRight(fathernode);//右单旋}else if (fathernode->_bf == 2 && cur->_bf == -1){RevolveRightLeft(fathernode); //右左双旋 }else if (fathernode->_bf == -2 && cur->_bf == 1){RevolveLeftRight(fathernode);//左右双旋}else{assert(false); //平衡因子出问题了}break;}}return true;}}下面通过代码的细节来深入理解旋转
详解单旋
左单旋
完整代码如下
void RevolveLeft(node *& fathernode)//左单旋
{node* cur = fathernode->_right; //父亲节点的右孩子fathernode->_right = cur->_left; //更改指向关系if (cur->_left != nullptr) //特殊情况cur->_left->_FatherNode = fathernode;//更改指向关系cur->_FatherNode = fathernode->_FatherNode;//更改指向关系if (fathernode->_FatherNode != nullptr) //为空是特殊情况,{if (fathernode->_FatherNode->_right == fathernode){fathernode->_FatherNode->_right = cur;//更改指向关系}else{fathernode->_FatherNode->_left = cur;//更改指向关系}}cur->_left = fathernode;//更改指向关系fathernode->_FatherNode = cur;//更改指向关系fathernode->_bf = 0; //更新平衡因子cur->_bf = 0;}处理指向关系时,一定不要忘了更改父亲的指向关系
经过左单旋之后,父亲节点和右孩子节点的平衡因子都为 0 ,可参考上文图示。
特殊情况如下,如果不处理特殊情况,程序很容易崩溃

右单旋
void RevolveRight(node *& fathernode) //右单旋
{node* cur = fathernode->_left; //父亲节点的左节点fathernode->_left = cur->_right;//更新指向关系if (cur->_right != nullptr) //特殊情况cur->_right->_FatherNode = fathernode;//更新指向关系cur->_FatherNode = fathernode->_FatherNode;//更新指向关系if (fathernode->_FatherNode != nullptr)//特殊情况{if (fathernode->_FatherNode->_right == fathernode){fathernode->_FatherNode->_right = cur;//更新指向关系}else{fathernode->_FatherNode->_left = cur;//更新指向关系}}cur->_right = fathernode;//更新指向关系fathernode->_FatherNode = cur;//更新指向关系fathernode->_bf = 0;//更新平衡因子cur->_bf = 0;
}详解双旋
左右双旋
左右双旋只需复用左单旋和右单旋即可,但平衡因子的更新却比较麻烦。
完整代码如下
void RevolveLeftRight(node *& fathernode)//左右双旋 {node* fathernodeL = fathernode->_left; //父亲节点的左孩子节点node* fathernodeLR = fathernodeL->_right;//父亲节点的左孩子节点的右孩子节点int bf = fathernodeLR->_bf; //保存平衡因子,实际是为了判断是插入了fathernodeLR左边还是右边还是fathernodeLR本身插入RevolveLeft(fathernodeL);RevolveRight(fathernode);//更新平衡因子if (bf == 0){fathernode->_bf = 0;fathernodeL->_bf = 0;fathernodeLR->_bf = 0;}else if (bf == -1){fathernode->_bf = 1;fathernodeL->_bf = 0;fathernodeLR->_bf = 0;}else if (bf == 1){fathernodeL->_bf = -1;fathernode = 0;fathernodeLR = 0;}else{assert(false);}}平衡因子情况如下

右左双旋
完整代码如下
void RevolveRightLeft(node *& fathernode) //右左双旋 {node* fathernodeR = fathernode->_right; node* fathernodeRL = fathernodeR->_left;int bf = fathernodeRL->_bf;RevolveRight(fathernodeR);RevolveLeft(fathernode);if (bf == 0){fathernode->_bf = 0;fathernodeR->_bf = 0;fathernodeRL->_bf = 0;}else if (bf == 1){fathernode->_bf = -1;fathernodeR->_bf = 0;fathernodeRL->_bf = 0;}else if (bf == -1){fathernodeR->_bf = 1;fathernode->_bf = 0;fathernodeRL->_bf = 0;}else{assert(false); }}平衡因子情况如下