一 多GPU训练
下面详细介绍如何从零开始并行地训练网络,这里需要运用小批量随机梯度下降算法。后面我还讲介绍如何使用高级API并行训练网络。
我们从一个简单的计算机视觉问题和一个稍稍过时的网络开始。这个网络有多个卷积层和汇聚层,最后可能 有几个全连接的层,看起来非常类似于LeNet (LeCun et al., 1998)或AlexNet (Krizhevsky et al., 2012)。假设我们有多个GPU(如果是桌面服务器则有2个,AWS g4dn.12xlarge上有4个,p3.16xlarge上有8个,p2.16xlarge上 有16个)。我们希望以一种方式对训练进行拆分,为实现良好的加速比,还能同时受益于简单且可重复的设计 选择。毕竟,多个GPU同时增加了内存和计算能力。简而言之,对于需要分类的小批量训练数据,我们有以下选择。
第一种方法,在多个GPU之间拆分网络。也就是说,每个GPU将流入特定层的数据作为输入,跨多个后续层 对数据进行处理,然后将数据发送到下一个GPU。与单个GPU所能处理的数据相比,我们可以用更大的网络 处理数据。此外,每个GPU占用的显存(memory footprint)可以得到很好的控制,虽然它只是整个网络显 存的一小部分。
第二种方法,拆分层内的工作。例如,将问题分散到4个GPU,每个GPU生成16个通道的数据,而不是在单 个GPU上计算64个通道。对于全连接的层,同样可以拆分输出单元的数量。其策略用于处理显存非常小(当时为2GB)的GPU。当通道或单元的数量不太小时,使计算性能有良好的提升。此外,由于可用的显存呈线性扩展,多个GPU能够处理不断变大的网络。
假设一台机器有k个GPU。给定需要训练的模型,虽然每个GPU上的参数值都是相同且同步的,但是每个GPU都 将独立地维护一组完整的模型参数。

一般来说,k个GPU并行训练过程如下:
- 在任何一次训练迭代中,给定的随机的小批量样本都将被分成k个部分,并均匀地分配到GPU上;
- 每个GPU根据分配给它的小批量子集,计算模型参数的损失和梯度;
- 将k个GPU中的局部梯度聚合,以获得当前小批量的随机梯度;
- 聚合梯度被重新分发到每个GPU中;
- 每个GPU使用这个小批量随机梯度,来更新它所维护的完整的模型参数集。
1.1 简单网络
在实践中请注意,当在k个GPU上训练时,需要扩大小批量的大小为k的倍数,这样每个GPU都有相同的工作量,就像只在单个GPU上训练一样。因此,在16‐GPU服务器上可以显著地增加小批量数据量的大小,同时可 能还需要相应地提高学习率。
%matplotlib inline
import torch
from torch import nn
from torch.nn import functional as F
from d2l import torch as d2l我们使用 LeNet,从零开始定义它,从而详细说明参数交换和同步。
# 初始化参数
scale = 0.01
W1 = torch.randn(size = (20, 1, 3, 3)) * scale
b1 = torch.zeros(20)
W2 = torch.randn(size = (50, 20, 5, 5)) * scale
b2 = torch.zeros(50)
W3 = torch.randn(size = (800, 128)) * scale
b3 = torch.zeros(128)
W4 = torch.randn(size = (128, 10)) * scale
b4 = torch.zeros(10)
params = [W1, b1, W2, b2, W3, b3, W4, b4]# 定义模型
def lenet(X, params):h1_conv = F.conv2d(input = X, weight = params[0], bias = params[1])h1_activation = F.relu(h1_conv)h1 = F.avg_pool2d(input = h1_activation, kernel_size = (2, 2), stride = (2, 2))h2_conv = F.conv2d(input = h1, weight = params[2], bias = params[3])h2_activation = F.relu(h2_conv)h2 = F.avg_pool2d(input = h2_activation, kernel_size = (2, 2), stride = (2, 2))h2 = h2.reshape(h2.shape[0], -1)h3_linear = torch.mm(h2, params[4] + params[5])h3 = F.relu(h3_linear)y_hat = torch.mm(h3, params[6] + params[7])return y_hat# 交叉熵损失
loss = nn.CrossEntropyLoss(reduction = 'none')1.2 数据同步
对于高效的多GPU训练,我们需要两个基本操作。首先,我们需要向多个设备分发参数并附加梯度 (get_params)。如果没有参数,就不可能在GPU上评估网络。第二,需要跨多个设备对参数求和,也就是说,需要一个allreduce函数。
def get_params(params, device):new_params = [p.to(device) for p in params]for p in params:p.requires_grad_()return new_paramsnew_params = get_params(params, d2l.try_gpu(0))
print(f'b1 权重:{new_params[1]}')
print(f'b1 梯度:{new_params[1].grad}')
由于还没有进行任何计算,因此权重参数的梯度仍然为零。假设现在有一个向量分布在多个GPU上,下面 的allreduce函数将所有向量相加,并将结果广播给所有GPU。请注意,我们需要将数据复制到累积结果的设 备,才能使函数正常工作。
def allreduce(data):for i in range(1, len(data)):data[0][:] += data[i].to(data[0].device)for i in range(1, len(data)):data[i][:] = data[0].to(data[i].device)通过在不同设备上创建具有不同值的向量并聚合它们。
data = [torch.ones((1, 2), device = d2l.try_gpu(i)) * (i + 1) for i in range(2)]
print(f'allreduce 之前:\n', data[0], '\n', data[1])
allreduce(data)
print('allreduce 之后:\n', data[0], '\n', data[1])
1.3 数据分发
我们需要一个简单的工具函数,将一个小批量数据均匀地分布在多个GPU上。例如,有两个GPU时,我们希望每个GPU可以复制一半的数据。因为深度学习框架的内置函数编写代码更方便、更简洁,所以在4 × 5矩阵 上使用它进行尝试。
data = torch.arange(20).reshape(4, 5)
devices = [torch.device('cuda:0'), torch.device('cuda:0')]
split = nn.parallel.scatter(data, devices)
print('input:', data)
print('load into:', device)
print('output:', split)为了方便以后复用,我们定义了可以同时拆分数据和标签的split_batch函数。
#@save
def split_batch(X, y, devices):assert X.shape[0] == y.shape[0]return (nn.parallel.scatter(x, devices),nn.parallel.scatter(y, devices))1.4 执行训练
现在我们可以在一个小批量上实现多GPU训练。在多个GPU之间同步数据将使用刚才讨论的辅助函 数allreduce和split_and_load。我们不需要编写任何特定的代码来实现并行性。因为计算图在小批量内的 设备之间没有任何依赖关系,因此它是“自动地”并行执行。
def train_batch(X, y, device_params, devices, lr):X_shards, y_shards = split_batch(X, y, devices)# 在每个GPU上分别计算损失ls = [loss(lenet(X_shard, device_W), y_shard).sum()for X_shard, y_shard, device_W in zip(X_shards, y_shards, device_params)]for l in ls: # 反向传播在每个GPU上分别执行l.backward()# 将每个GPU的所有梯度相加,并将其广播到所有GPUwith torch.no_grad():for i in range(len(device_params[0])):allreduce([device_params[c][i].grad for c in range(len(devices))])# 在每个GPU上分别更新模型参数for param in device_params:d2l.sgd(param, lr, X.shape[0]) # 在这里,我们使用全尺寸的小批量现在,我们可以定义训练函数。与前几章中略有不同:训练函数需要分配GPU并将所有模型参数复制到所有 设备。显然,每个小批量都是使用train_batch函数来处理多个GPU。我们只在一个GPU上计算模型的精确度, 而让其他GPU保持空闲,尽管这是相对低效的,但是使用方便且代码简洁。
def train(num_gpus, batch_size, lr):train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)devices = [d2l.try_gpu(i) for i in range(num_gpus)]# 将模型参数复制到num_gpus个GPUdevice_params = [get_params(params, d) for d in devices]num_epochs = 10animator = d2l.Animator('epoch', 'test acc', xlim=[1, num_epochs])timer = d2l.Timer()for epoch in range(num_epochs):timer.start()for X, y in train_iter:# 为单个小批量执行多GPU训练train_batch(X, y, device_params, devices, lr)torch.cuda.synchronize()timer.stop()# 在GPU0上评估模型animator.add(epoch + 1, (d2l.evaluate_accuracy_gpu(lambda x: lenet(x, device_params[0]), test_iter, devices[0]),))print(f'测试精度:{animator.Y[0][-1]:.2f},{timer.avg():.1f}秒/轮,'f'在{str(devices)}')train(num_gpus=1, batch_size=256, lr=0.2)
保持批量大小和学习率不变,并增加为2个GPU,我们可以看到测试精度与之前的实验基本相同。不同的GPU个 数在算法寻优方面是相同的。不幸的是,这里没有任何有意义的加速:模型实在太小了;而且数据集也太小 了。在这个数据集中,我们实现的多GPU训练的简单方法受到了巨大的Python开销的影响。在未来,我们将 遇到更复杂的模型和更复杂的并行化方法。尽管如此,让我们看看Fashion‐MNIST数据集上会发生什么。
train(num_gpus=2, batch_size=256, lr=0.2)
小结:
- 有多种方法可以在多个GPU上拆分深度网络的训练。拆分可以在层之间、跨层或跨数据上实现。前两者需要对数据传输过程进行严格编排,而最后一种则是最简单的策略。
- 数据并行训练本身是不复杂的,它 通过增加有效的小批量数据量的大小提高了训练效率。
- 在数据并行中,数据需要跨多个GPU拆分,其中每个GPU执行自己的前向传播和反向传播,随后所有的 梯度被聚合为一,之后聚合结果向所有的GPU广播。
- 小批量数据量更大时,学习率也需要稍微提高一些。
二 多GPU的简洁实现
每个新模型的并行计算都从零开始实现是无趣的。此外,优化同步工具以获得高性能也是有好处的。下面我 们将展示如何使用深度学习框架的高级API来实现这一点。
import torch
from torch import nn
from d2l import torch as d2l它依然能够容易地和快速地训练。我们选择的是 (He et al., 2016)中的ResNet‐18。因为输入的图像很小,所以稍微修改了一下。我们在开始时使用了更小的卷积核、步长和填充,而且删除了最大汇聚层。
#@save
def resnet18(num_classes, in_channels=1):"""稍加修改的ResNet-18模型"""def resnet_block(in_channels, out_channels, num_residuals,first_block=False):blk = []for i in range(num_residuals):if i == 0 and not first_block:blk.append(d2l.Residual(in_channels, out_channels,use_1x1conv=True, strides=2))else:blk.append(d2l.Residual(out_channels, out_channels))return nn.Sequential(*blk)# 该模型使用了更小的卷积核、步长和填充,而且删除了最大汇聚层net = nn.Sequential(nn.Conv2d(in_channels, 64, kernel_size=3, stride=1, padding=1),nn.BatchNorm2d(64), nn.ReLU())net.add_module("resnet_block1", resnet_block(64, 64, 2, first_block=True))net.add_module("resnet_block2", resnet_block(64, 128, 2))net.add_module("resnet_block3", resnet_block(128, 256, 2))net.add_module("resnet_block4", resnet_block(256, 512, 2))net.add_module("global_avg_pool", nn.AdaptiveAvgPool2d((1,1)))net.add_module("fc", nn.Sequential(nn.Flatten(),nn.Linear(512, num_classes)))return net
我们将在训练回路中初始化网络。
net = resnet18(10)
# 获取GPU列表
devices = d2l.try_all_gpus()
# 我们将在训练代码实现中初始化网络如前所述,用于训练的代码需要执行几个基本功能才能实现高效并行:
- 需要在所有设备上初始化网络参数;
- 在数据集上迭代时,要将小批量数据分配到所有设备上;
- 跨设备并行计算损失及其梯度;
- 聚合梯度,并相应地更新参数。 最后,并行地计算精确度和发布网络的最终性能。除了需要拆分和聚合数据外,训练代码与前几章的实现非 常相似。
def train(net, num_gpus, batch_size, lr):train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size)devices = [d2l.try_gpu(i) for i in range(num_gpus)]def init_weights(m):if type(m) in [nn.Linear, nn.Conv2d]:nn.init.normal_(m.weight, std=0.01)net.apply(init_weights)# 在多个GPU上设置模型net = nn.DataParallel(net, device_ids=devices)trainer = torch.optim.SGD(net.parameters(), lr)loss = nn.CrossEntropyLoss()timer, num_epochs = d2l.Timer(), 10animator = d2l.Animator('epoch', 'test acc', xlim=[1, num_epochs])for epoch in range(num_epochs):net.train()timer.start()for X, y in train_iter:trainer.zero_grad()X, y = X.to(devices[0]), y.to(devices[0])l = loss(net(X), y)l.backward()trainer.step()timer.stop()animator.add(epoch + 1, (d2l.evaluate_accuracy_gpu(net, test_iter),))print(f'测试精度:{animator.Y[0][-1]:.2f},{timer.avg():.1f}秒/轮,'f'在{str(devices)}')接下来看看这在实践中是如何运作的。我们先在单个GPU上训练网络进行预热。
train(net, num_gpus=1, batch_size=256, lr=0.1)

接下来我们使用2个GPU进行训练。
train(net, num_gpus=2, batch_size=512, lr=0.2)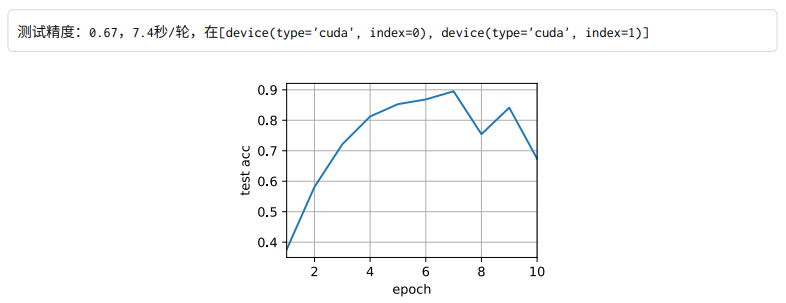
小结:
- 神经网络可以在(可找到数据的)单GPU上进行自动评估。
- 每台设备上的网络 需要先初始化,然后再尝试访问该设备上的参数,否则会遇到错误。
- 优化算法在多个GPU上自动聚合。
三 多机训练
新的挑战出现在多台机器上进行分布式训练:我们 需要服务器之间相互通信,而这些服务器又只通过相对较低的带宽结构连接,在某些情况下这种连接的速度可能会慢一个数量级,因此跨设备同步是个棘手的问题。 毕竟,在不同机器上运行训练代码的速度会有细微的差别,因此如果想使用分布式优化的同步算法就需要同 步(synchronize)这些机器。
- 在每台机器上读取一组(不同的)批量数据,在多个GPU之间分割数据并传输到GPU的显存中。基于每个GPU上的批量数据分别计算预测和梯度。
- 来自一台机器上的所有的本地GPU的梯度聚合在一个GPU上(或者在不同的GPU上聚合梯度的某些部 分)。
- 每台机器的梯度被发送到其本地CPU中。
- 所有的CPU将梯度发送到中央参数服务器中,由该服务器聚合所有梯度。
- 然后使用聚合后的梯度来更新参数,并将更新后的参数广播回各个CPU中。
- 更新后的参数信息发送到本地一个(或多个)GPU中。
- 所有GPU上的参数更新完成。