知不足而奋进 望远山而前行
文章目录
-
目录
文章目录
前言
目标
内容
PWM基础概念
STC8H芯片
PWMA应用
PWM配置详解
周期
占空比
模式
使能PWM
引脚配置
EAXSFR扩展寄存器
总结
前言
学习PWM(脉宽调制)是探索数字信号转模拟信号的重要一步,尤其在控制电路输出方面具有广泛的应用。本次学习将聚焦于了解PWM的基础概念、掌握在STC8H芯片上配置PWMA的方法以及应用实践。通过深入学习PWM技术,您将能够控制各种设备的亮度、速度等参数,从而在工程和电子领域中做出更多创新。
目标
- 了解PWM基础概念和工作原理
- 学习如何在STC8H上配置PWMA
- 掌握PWMA的各个配置
- 学习如何使用PWMA控制LED亮度
- 掌握调试PWM的方法
内容
PWM基础概念
PWM全称是脉宽调制(Pulse Width Modulation),是一种通过改变信号的脉冲宽度来控制电路输出的技术。PWM技术在工业自动化、电机控制、LED调光等领域广泛应用。
PWM是一种将数字信号转换为模拟信号的技术,它通过改变信号的占空比来控制输出的电平。在STC8H中,PWM输出的频率和占空比可以由程序控制,因此可以用来控制各种电机、灯光和其他设备的亮度、速度等参数。
STC8H芯片
STC8H 系列的单片机内部集成了8 通道 16 位高级PWM 定时器,分成两周期可不同的 PWM,分别命名为 PWMA 和PWMB ,可分别单独设置。
第一组 PWMA 可配置成4 组互补/对称/死区控制的PWM 或捕捉外部信号。
第二组 PWMB 可配置成4 路PWM 输出或捕捉外部信号。
两组 PWM 的时钟频率可分别独立设置。
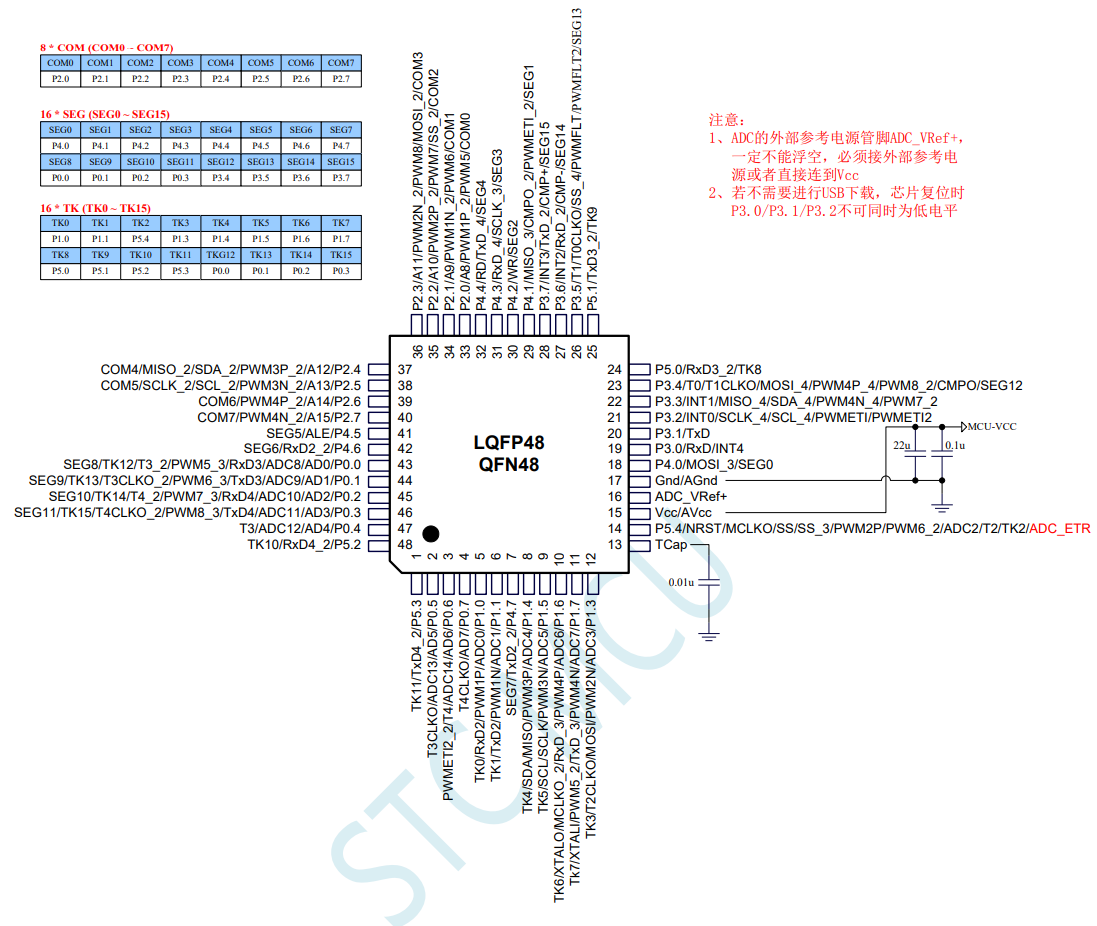
PWM与引脚对应关系如下图:
| PWM | PWM通道 | 对应引脚 | |
| PWMxP | PWMxN | ||
| PWMA | PWM1P & PWM1N | P1.0 | P1.1 |
| P2.0 | P2.1 | ||
| PWM2P & PWM2N | P5.4 | P1.3 | |
| P2.2 | P2.3 | ||
| PWM3P & PWM3N | P1.4 | P1.5 | |
| P2.4 | P2.5 | ||
| PWM4P & PWM4N | P1.6 | P1.7 | |
| P2.6 | P2.7 | ||
| P3.4 | P3.3 | ||
| PWMB | PWM5 | P0.0 | |
| P1.7 | |||
| P2.0 | |||
| PWM6 | P0.1 | ||
| P2.1 | |||
| P5.4 | |||
| PWM7 | P0.2 | ||
| P2.2 | |||
| P3.3 | |||
| PWM8 | P0.3 | ||
| P2.3 | |||
| P3.4 | |||
PWMA应用
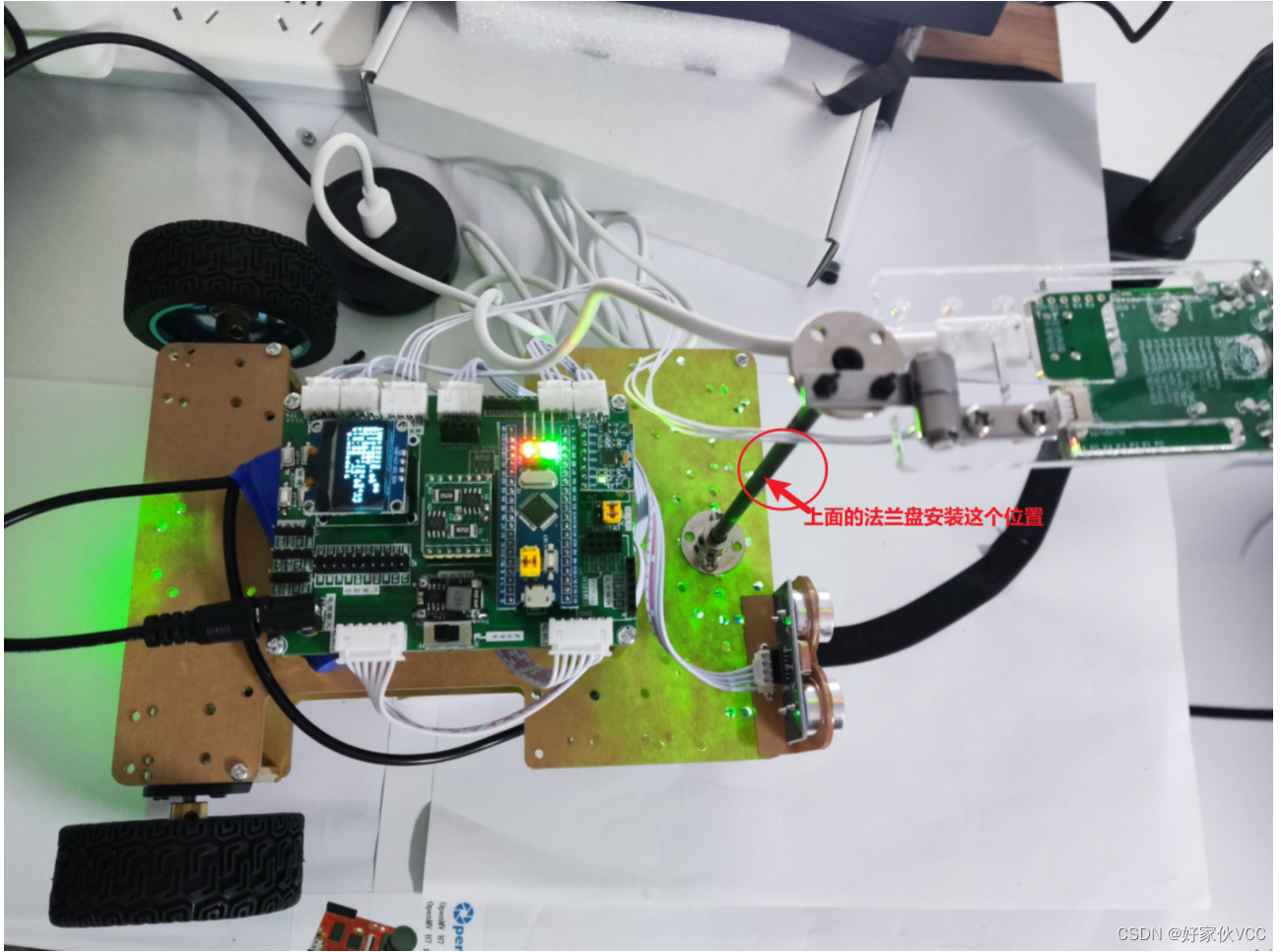
控制引脚P2.7实现LED灯1的呼吸效果。
- 拷贝所需库文件(其他必备库请自行准备)
-
STC8H_PWM.cSTC8H_PWM.hNVIC.cNVIC.hSwitch.h
- 导入头文件,初始化宏及全局变量
#include "Config.h"
#include "GPIO.h"
#include "Delay.h"
#include "NVIC.h"
#include "Switch.h"
#include "STC8H_PWM.h"#define LED_SW P45#define LED1 P27
#define LED2 P26
#define LED3 P15#define FREQ 1000#define PERIOD ((MAIN_Fosc / FREQ) - 1) // 周期PWMx_Duty dutyA;- 配置GPIO
void GPIO_config(void) {GPIO_InitTypeDef GPIO_InitStructure; //结构定义// LED_SWGPIO_InitStructure.Pin = GPIO_Pin_5; //指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_OUT_PP; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P4, &GPIO_InitStructure);//初始化// P2GPIO_InitStructure.Pin = GPIO_Pin_6 | GPIO_Pin_7; //指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_PullUp; //指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P2, &GPIO_InitStructure);//初始化
}- 配置PWM
void PWM_config(void)
{PWMx_InitDefine PWMx_InitStructure;// 配置PWM4PWMx_InitStructure.PWM_Mode = CCMRn_PWM_MODE2; //模式, CCMRn_FREEZE,CCMRn_MATCH_VALID,CCMRn_MATCH_INVALID,CCMRn_ROLLOVER,CCMRn_FORCE_INVALID,CCMRn_FORCE_VALID,CCMRn_PWM_MODE1,CCMRn_PWM_MODE2PWMx_InitStructure.PWM_Duty = 0; //PWM占空比时间, 0~PeriodPWMx_InitStructure.PWM_EnoSelect = ENO4P | ENO4N; //输出通道选择, ENO1P,ENO1N,ENO2P,ENO2N,ENO3P,ENO3N,ENO4P,ENO4N / ENO5P,ENO6P,ENO7P,ENO8PPWM_Configuration(PWM4, &PWMx_InitStructure);// 配置PWMAPWMx_InitStructure.PWM_Period = PERIOD; //周期时间, 0~65535PWMx_InitStructure.PWM_DeadTime = 0; //死区发生器设置, 0~255PWMx_InitStructure.PWM_MainOutEnable= ENABLE; //主输出使能, ENABLE,DISABLEPWMx_InitStructure.PWM_CEN_Enable = ENABLE; //使能计数器, ENABLE,DISABLEPWM_Configuration(PWMA, &PWMx_InitStructure); //初始化PWM通用寄存器, PWMA,PWMB// 切换PWM4选择PWM4_SW_P26_P27PWM4_SW(PWM4_SW_P26_P27); //PWM4_SW_P16_P17,PWM4_SW_P26_P27,PWM4_SW_P66_P67,PWM4_SW_P34_P33// 初始化PWMA的中断NVIC_PWM_Init(PWMA,DISABLE,Priority_0);
}- 编写Main函数
void main() {char direction = 1;u8 duty_percent = 0;// 0 -> 100EAXSFR(); /* 扩展寄存器访问使能, 必写! */GPIO_config();PWM_config();EA = 1;// 总开关LED_SW = 0;LED1 = 0; // P2.7 PWM4LED2 = 0;LED3 = 0;// 循环之前,设置一次pwm(可选)dutyA.PWM4_Duty = PERIOD * duty_percent / 100;UpdatePwm(PWM4, &dutyA);// 0 -> 100while(1) {duty_percent += direction;// 让duty_percent一直在0-100来回往返if(duty_percent >= 100) {duty_percent = 100;direction = -1;} else if(duty_percent <= 0) {duty_percent = 0;direction = 1;}// 修改PWM4的dutydutyA.PWM4_Duty = PERIOD * duty_percent / 100;UpdatePwm(PWM4, &dutyA);delay_ms(10);}
}PWM配置详解
周期
系统主频:1秒钟计数多少次。
代码中的PWM周期(PWM Period),指的是按N等份切分1秒钟,每个等份的计数值。

例如上图,我们按照8等份切分1秒钟的总计数值MAIN_Fosc(主频),每个PWM周期的计数值为:
PWM_Period = MAIN_Fosc / 8 = 24M / 8 = 3M = 3 000 000 单位为次。
即如果将这个3M作为Period参数,可以得到PWM方波每个周期的时长为:
1 / 8 = 0.125s
代码中的配置:
#define PERIOD (MAIN_Fosc / FREQ) // 周期
PWMx_InitStructure.PWM_Period = PERIOD - 1;配置的是周期中的计数值。
我们的理解策略:通常我们不关心计数值,关心的是1秒钟执行多少次(即频率Hz),也就是一秒钟多少个周期。
因此在代码MAIN_Fosc / 1000中的1000表示的是1秒钟多少个周期(即频率Hz)。
MAIN_Fosc / 1000表示的是每个周期的计数值。那为什么要-1呢?因为计数器是从0开始计数的。
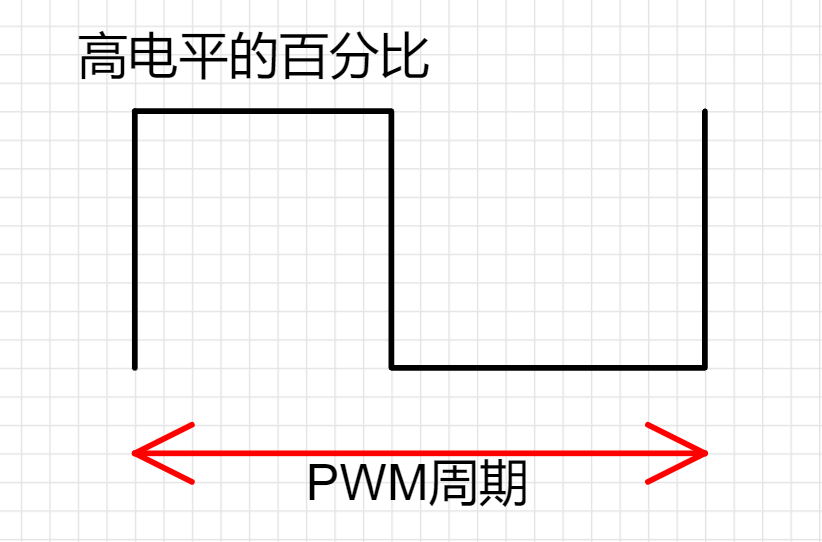
占空比
在一个PWM的周期计数中,高电平的计数时长百分比。
模式
- 冻结: CCMRn_FREEZE
- 匹配时设置通道 n 的输出为有效电平: CCMRn_MATCH_VALID
- 匹配时设置通道 n 的输出为无效电平: CCMRn_MATCH_INVALID
- 翻转: CCMRn_ROLLOVER
- 强制为无效电平: CCMRn_FORCE_INVALID
- 强制为有效电平: CCMRn_FORCE_VALID
- PWM 模式 1: CCMRn_PWM_MODE1
- PWM 模式 2: CCMRn_PWM_MODE2
常用的为PWM 模式 1PWM 模式 2
PWM 模式 1和PWM 模式 2是反向的,一个占空比越大越亮,一个是越小越亮。
使能PWM
PWMx_InitStructure.PWM_MainOutEnable= ENABLE; //主输出使能, ENABLE,DISABLE
PWMx_InitStructure.PWM_CEN_Enable = ENABLE; //使能计数器, ENABLE,DISABLE
PWM_Configuration(PWMA, &PWMx_InitStructure); //初始化PWM通用寄存器, PWMA,PWMB引脚配置
PWM4_SW(PWM4_SW_P26_P27);使能配置成功后,pwm才能工作。
如果运行中pwm想停止掉,也可以通过配置使能来停止。
EAXSFR扩展寄存器
由于PWM的配置相关特殊功能寄存器位于扩展RAM区域,访问这些寄存器,需先将P_SW2的BIT7设置为1,才可正常读写。
EAXSFR(); /* 扩展寄存器访问使能 */详细可参见STC8手册:
- 3.1.2 《外设端口切换控制寄存器 2(P_SW2)》
- 9.2.8 《扩展 SFR 使能寄存器 EAXFR 的使用说明》
总结
通过本次学习,您已经了解了PWM的基本概念和工作原理,掌握了在STC8H上配置PWMA的步骤以及PWM的各种配置参数。此外,您还学会了如何利用PWM控制LED的亮度,并掌握了调试PWM的方法