Autoware 是一个开源的自动驾驶软件堆栈,提供了丰富的功能和模块,用于实现自动驾驶车辆的感知、定位、规划和控制等功能。北京渡众机器人公司将多款自动驾驶小车在多场景运行Autoware ,它可以实现以下功能:
1. 感知:利用传感器数据如摄像头、雷达和激光雷达等,Autoware 可以帮助北京渡众机器人公司的自动驾驶车辆实现对周围环境的感知,包括检测障碍物、识别道路标志和车道线等。
2. 定位:通过全球定位系统(GPS)和惯性测量单元(IMU)等传感器,Autoware 能够帮助北京渡众机器人公司的自动驾驶车辆准确定位和导航,确保车辆在道路上准确行驶。
3. 规划:基于感知和定位的数据,Autoware 可以进行路径规划,帮助北京渡众机器人公司的自动驾驶车辆规划最佳行驶路径,避开障碍物和遵守交通规则。
4. 控制:Autoware 还包含控制算法,可以帮助北京渡众机器人公司的自动驾驶车辆进行精确的车辆控制,包括加速、刹车、转向等,确保车辆安全、稳定地行驶。

北京渡众机器人科技有限公司研发的自动驾驶小车运行Autoware时有如下多的场景实验:
车道驾驶场景
1. 启动 Autoware
source ~/autoware/install/setup.bash
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware_map/sample-map-planning vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit
警告
请注意,此处您不能用 ~ 代替 $HOME 。
如果使用 ~ ,则无法加载地图。
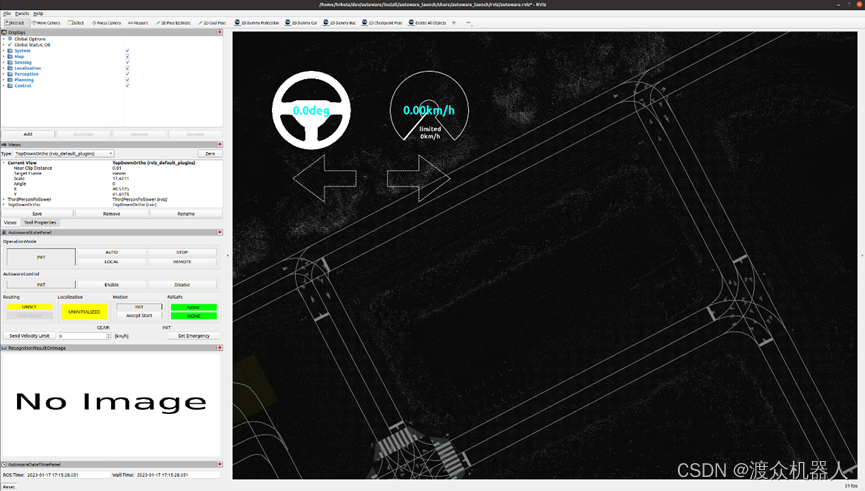
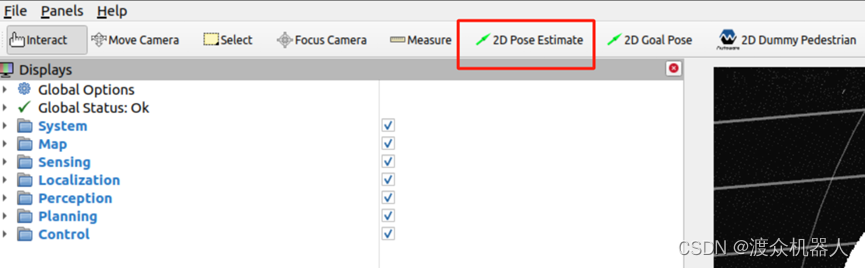
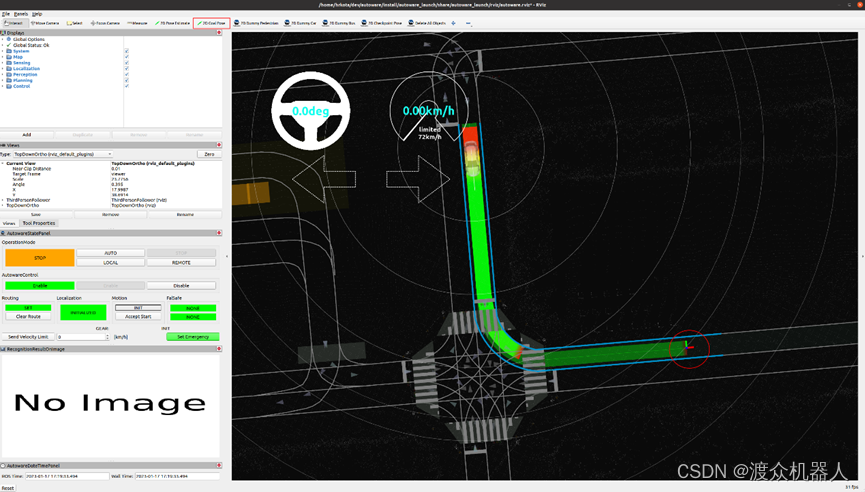
2. 为当前车辆设置初始位姿#
a) 单击工具栏中2D Pose estimate 的按钮,或按 P 键。
b) 在“3D 视图”窗格中,单击并按住鼠标左键,然后拖动以设置初始位姿的方向。现在代表车辆的图像应该能显示出来。
警告
请记住将汽车的初始姿势设置为与车道相同的方向。
要确认车道的方向,请检查地图上显示的箭头。
3.为当前车辆设定一个目标位置#
a) 单击工具栏中的2D Goal Pose 按钮,或按 G 键。

b) 在“3D 视图”窗格中,单击并按住鼠标左键,然后拖动以设置目标位姿的方向。如果操作正确,您将看到从初始位姿到目标位姿的计划路径。
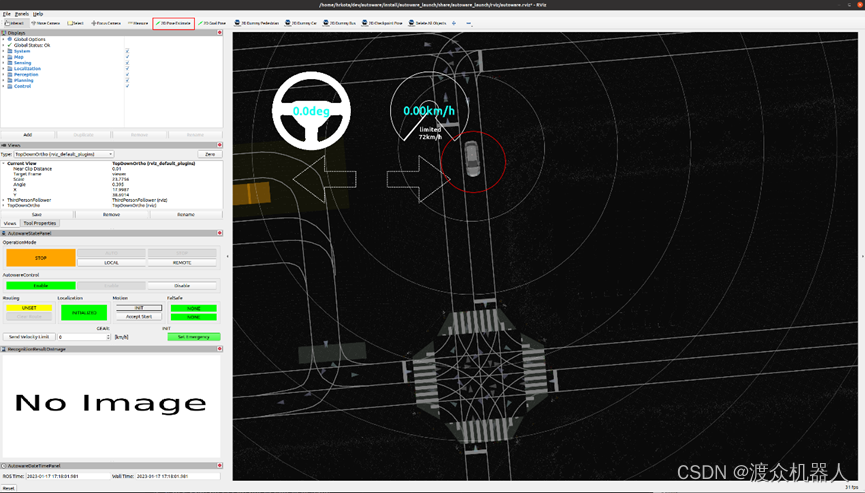
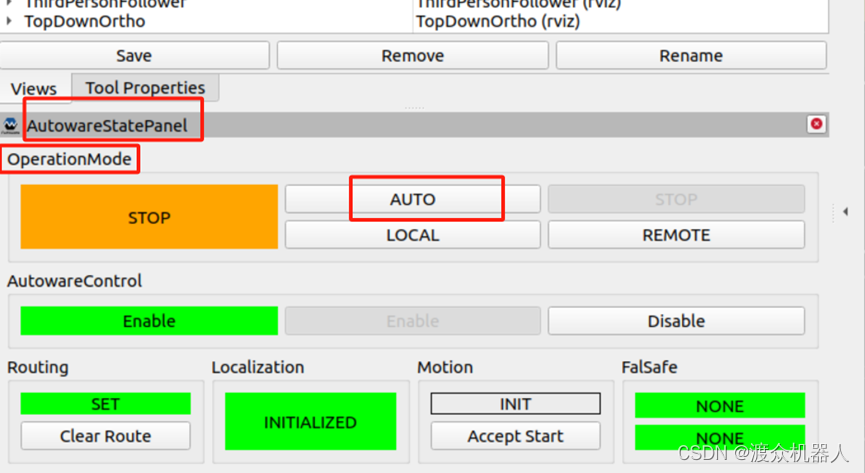
4.启动当前车辆#
现在,您可以通过单击屏幕左侧下面 AutowareStatePanel 中 OperationMode 菜单栏的 AUTO 按钮来启动自我车辆驾驶。
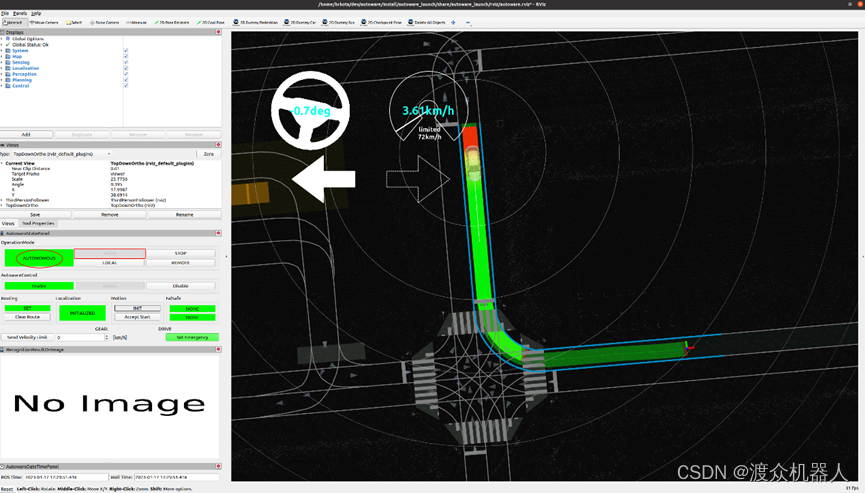
或者,您可以通过运行以下命令手动启动车辆:
source ~/autoware/install/setup.bash
ros2 service call /api/operation_mode/change_to_autonomous autoware_adapi_v1_msgs/srv/ChangeOperationMode {}
之后,您可以看到 OperationMode 菜单栏下显示了绿色的 AUTONOMOUS 并且 AUTO 按钮显示为灰色。
3.3.2.2停车场景#
1.设置初始位置和目标位置,并启动当前车辆。

2.当车辆接近目标时,它将从车道行驶模式切换到停车模式。
3.之后,车辆将倒车进入目的地停车位。

3.3.2.3从路边驶出和靠路边停车的场景#
1.在路边驶出的场景中,将当前车辆设置在某个路边。

2.设定一个目标,然后启动当前车辆。
3.在靠路边停车的场景中,和从路边驶出场景类似,将当前车辆设置在车道上,并在路边设置一个目的地。
3.3.2.3变道场景#
1.下载并解压地图。
gdown -O ~/autoware_map/ 'https://github.com/tier4/AWSIM/releases/download/v1.1.0/nishishinjuku_autoware_map.zip'
unzip -d ~/autoware_map ~/autoware_map/nishishinjuku_autoware_map.zip
2.使用西新宿地图同时使用以下命令启动autoware:
source ~/autoware/install/setup.bash
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware_map/nishishinjuku_autoware_map vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit

3.在相邻车道上设置一个初始位置和一个目标位置。

4.启动当前车辆。它将沿着规划的路径进行变道。

3.3.2.5避障场景#
1.在同一条车道上设置初始位置和目标位置,将会生成一条路径。

2.在当前规划的路上设置“2D Dummy Bus (2D虚拟巴士)”当做障碍物,系统将规划一条新的道路。

3.启动当前车辆。它将沿着新规划的路径前行以避开障碍物。
智能网联自动驾驶小车运行Autoware 实现港口物流是一个非常具有潜力的应用场景。Autoware 是一款开源的自动驾驶软件,可以帮助实现自动驾驶车辆的导航、避障、感知等功能。

在港口物流方面,北京渡众机器人公司的智能网联自动驾驶小车可以被用来实现货物的自动运输和分拣,提高物流效率并降低成本。具体来说,通过在港口内部部署北京渡众公司的自动驾驶小车,可以实现以下功能:
1. 自动化搬运:利用北京渡众机器人公司的自动驾驶小车从货物堆场将货物运送到指定位置,减少人力成本和提高运输效率。
2. 智能调度:基于Autoware 的路径规划和调度算法,可以实现多辆自动驾驶小车之间的协同工作,实现货物的快速、高效运输。
3. 船舶配载:通过与港口信息系统集成,北京渡众机器人公司的自动驾驶小车可以实现船舶货物的自动配载和卸载,提高作业效率和安全性。
4. 实时监控:通过搭载传感器和摄像头,北京渡众机器人公司的自动驾驶小车可以实时监控货物状态和周围环境,确保货物安全运输。
综合来看,北京渡众机器人公司将Autoware 自动驾驶软件与自动驾驶小车结合在港口物流中应用,可以为物流业带来更高效、更安全、更智能的运营模式,提高港口作业效率,降低成本,提升整体竞争力。