使用加锁操作和解锁操作可以解决并发线程/进程的互斥问题。任何想进入临界区的线程,必须先执行加锁操作。若加锁操作顺利通过,则线程可进入临界区;在完成对临界资源的访问后再执行解锁操作,以释放该临界资源。
一、互斥锁与自旋锁
最底层的两种锁是互斥锁和自旋锁,很多高级的锁都是基于它们实现的。当已经有一个线程加锁后,其他线程加锁则就会失败,互斥锁和自旋锁对于加锁失败后的处理方式是不一样的:
- 互斥锁加锁失败后,线程会释放 CPU ,给其他线程;
- 自旋锁加锁失败后,线程会忙等待,直到它拿到锁;
互斥锁
互斥锁是一种「独占锁」,在抢锁失败的情况下主动放弃CPU进⼊睡眠状态,直到锁的状态改变时再唤醒。为了实现锁的状态发生改变时唤醒阻塞的线程或者进程,需要把锁交给操作系统管理,所以互斥锁在加锁操作时涉及两次上下⽂的切换:
- 当线程加锁失败时,内核会把线程的状态从「运行」状态设置为「睡眠」状态,然后把 CPU 切换给其他线程运行;
- 接着,当锁被释放时,之前「睡眠」状态的线程会变为「就绪」状态,然后内核会在合适的时间,把 CPU 切换给该线程运行。
线程的上下文切换的是什么?
当两个线程是属于同一个进程,因为虚拟内存是共享的,所以在切换时,虚拟内存这些资源就保持不动,只需要切换线程的私有数据、寄存器等不共享的数据。

自旋锁
自旋锁是通过 CPU 提供的CAS函数(Compare And Swap),在用户态完成加锁和解锁操作,不会主动产生线程上下文切换,所以相比互斥锁来说,速度更快,开销更小。
一般加锁的过程,包含两个步骤:
- 第一步,查看锁的状态,如果锁是空闲的,则执行第二步;
- 第二步,将锁设置为当前线程持有;
CAS 函数就把这两个步骤合并成一条硬件级指令,形成原子指令,这样就保证了这两个步骤是不可分割的,要么一次性执行完两个步骤,要么两个步骤都不执行。
使用自旋锁的时候,当发生多线程竞争锁的情况,加锁失败的线程会忙等待,直到它拿到锁。这里的忙等待可以用 while 循环等待实现,不过最好是使用 CPU 提供的PAUSE 指令来实现忙等待,可以减少循环等待时的耗电量。
自旋锁是最比较简单的一种锁,一直自旋,利用 CPU 周期,直到锁可用。需要注意,在单核 CPU 上,需要抢占式的调度器(即不断通过时钟中断一个线程,运行其他线程)。否则,自旋锁在单 CPU 上无法使用,因为一个自旋的线程永远不会放弃 CPU。
自旋锁开销少,在多核系统下一般不会主动产生线程切换,适合异步、协程等在用户态切换请求的编程方式,但如果被锁住的代码执行时间过长,自旋的线程会长时间占用 CPU 资源。
小结
互斥锁和自旋锁是锁的最基本处理方式,更高级的锁都会选择其中一个来实现。互斥锁实际的效率还是可以让人接受的,加锁的时间⼤概100ns左右,实际上互斥锁的⼀种可能的实现是先⾃旋⼀段时间,当⾃旋的时间超过阈值后再将线程投⼊睡眠中,因此在并发运算中使⽤互斥锁(每次占⽤锁的时间很短)的效果可能不亚于使用自旋锁。
二、读写锁
读写锁从字面意思我们也可以知道,它由读锁和写锁两部分构成,如果只读取共享资源用读锁加锁,如果要修改共享资源则用写锁加锁。所以,读写锁适用于能明确区分读操作和写操作的场景。
读写锁的工作原理是:
- 当「写锁」没有被线程持有时,多个线程能够并发地持有读锁,这大大提高了共享资源的访问效率,因为「读锁」是用于读取共享资源的场景,所以多个线程同时持有读锁也不会破坏共享资源的数据。
- 但是,一旦「写锁」被线程持有后,读线程的获取读锁的操作会被阻塞,而且其他写线程的获取写锁的操作也会被阻塞。
写锁是独占锁,因为任何时刻只能有一个线程持有写锁,类似互斥锁和自旋锁,而读锁是共享锁,因为读锁可以被多个线程同时持有。读写锁在读多写少的场景,能发挥出优势。
另外,根据实现的不同,读写锁可以分为「读优先锁」和「写优先锁」。
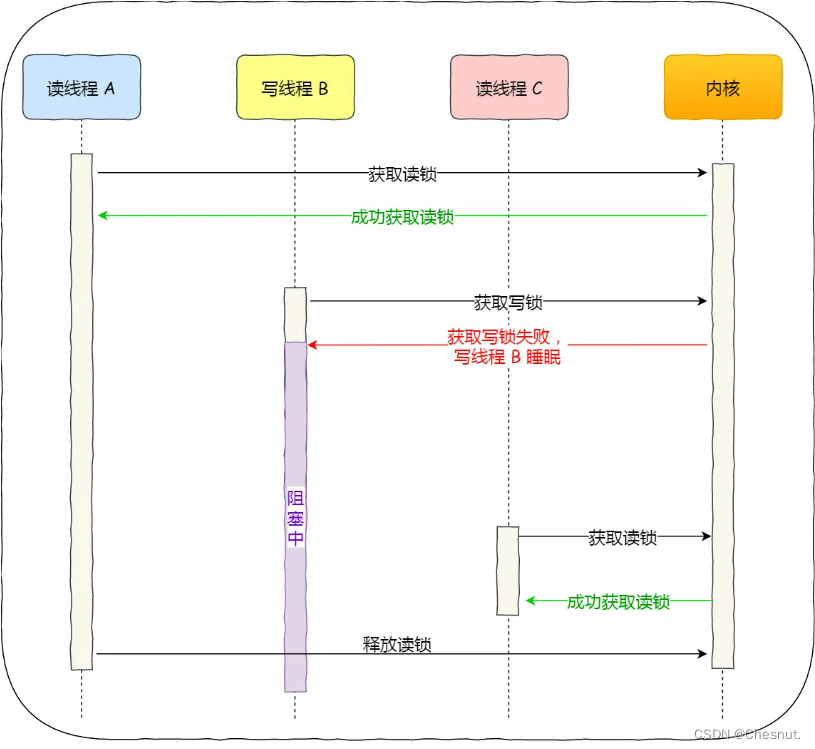
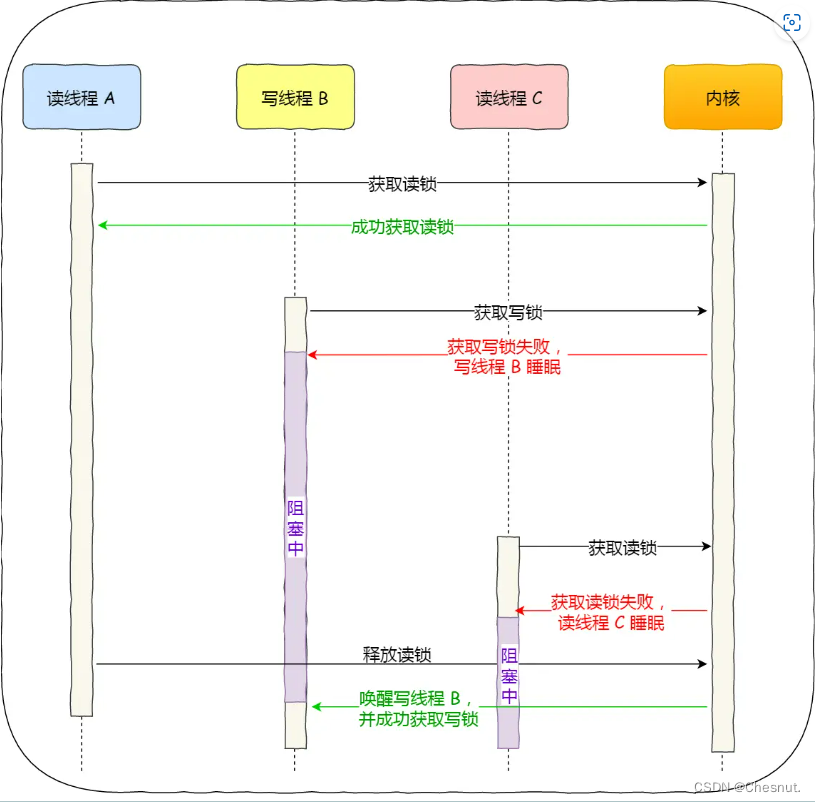
读优先锁期望的是,读锁能被更多的线程持有,以便提高读线程的并发性,它的工作方式是:当读线程 A 先持有了读锁,写线程 B 在获取写锁的时候,会被阻塞,并且在阻塞过程中,后续来的读线程 C 仍然可以成功获取读锁,最后直到读线程 A 和 C 释放读锁后,写线程 B 才可以成功获取写锁。
写优先锁是优先服务写线程,其工作方式是:当读线程 A 先持有了读锁,写线程 B 在获取写锁的时候,会被阻塞,并且在阻塞过程中,后续来的读线程 C 获取读锁时会失败,于是读线程 C 将被阻塞在获取读锁的操作,这样只要读线程 A 释放读锁后,写线程 B 就可以成功获取写锁。
公平读写锁比较简单的一种方式是:用队列把获取锁的线程排队,不管是写线程还是读线程都按照先进先出的原则加锁即可,这样读线程仍然可以并发,也不会出现「饥饿」的现象。
三、乐观锁与悲观锁
乐观锁和悲观锁用于解决并发场景下的数据竞争问题。
乐观锁操作数据时比较乐观,它假定冲突的概率很低,乐观锁不会上锁,知识在执行更新的时候判断一下在此期间是否发生冲突(他人修改数据),如果没有其他线程在修改资源,那么操作完成,如果发现有其他线程已经修改过这个资源,就放弃本次操作。
悲观锁做事比较悲观,它认为多线程同时修改共享资源的概率比较高,于是很容易出现冲突,所以访问共享资源前,先要上锁。互斥锁、自旋锁、读写锁,都是属于悲观锁。
乐观锁实现机制
1. CAS(Compare And Swap)机制
(1)CAS操作包括3个操作数:
需要读写的内存位置(V)
进行比较的预期值(A)
拟写入的新值(B)
(2)操作逻辑:如果内存位置V的值等于预期值A,则将该位置更新为B,否则不进行任何操作。许多CAS是自旋,如果操作不成功,会一直重试,直到操作成功为止。
ABA问题
假设有两个线程:线程1和线程2,两个线程按照顺序进行以下操作:
- 线程1读取内存中数据A
- 线程2修改该数据为B
- 线程2修改该数据为A
- 线程1对数据进行CAS操作
在第四步操作中,由于内存中数据仍然为A,因此CAS操作成功,但实际上该数据已经被线程2修改过。这种现象称为ABA问题,乐观锁并不知道数据已经改变,仅仅基于值是否变化作为判断依据。
2. 版本号机制
在数据中增加一个字段Version,表示该数据的版本号,每当数据被修改,版本号+1。当某个线程查询数据时,将该数据的版本号一起取出,当线程更新数据时,判断当前版本号与之前读取的版本是否一致,如果一致再进行以下操作。







![[next.js]pwa缓存](https://img-blog.csdnimg.cn/direct/ed5bbe509c254d37be7e153217f6212e.png)

![微软云计算[3]之Windows Azure AppFabric](https://img-blog.csdnimg.cn/direct/d8d23bf8ed2a4fe2875def9da0d418b5.png)