目录
- 1、前言
- 2、仿真环境的搭建
- 3、仿真环境资源链接
- 4、总结
1、前言
在现代社会中,机器人技术正变得越来越普遍和重要。机器人的自动化能力使其能够在许多不同的领域发挥作用,例如生产线、医疗保健和家庭助理等。本系列将着重介绍如何搭建一个自动色块抓取机器人。
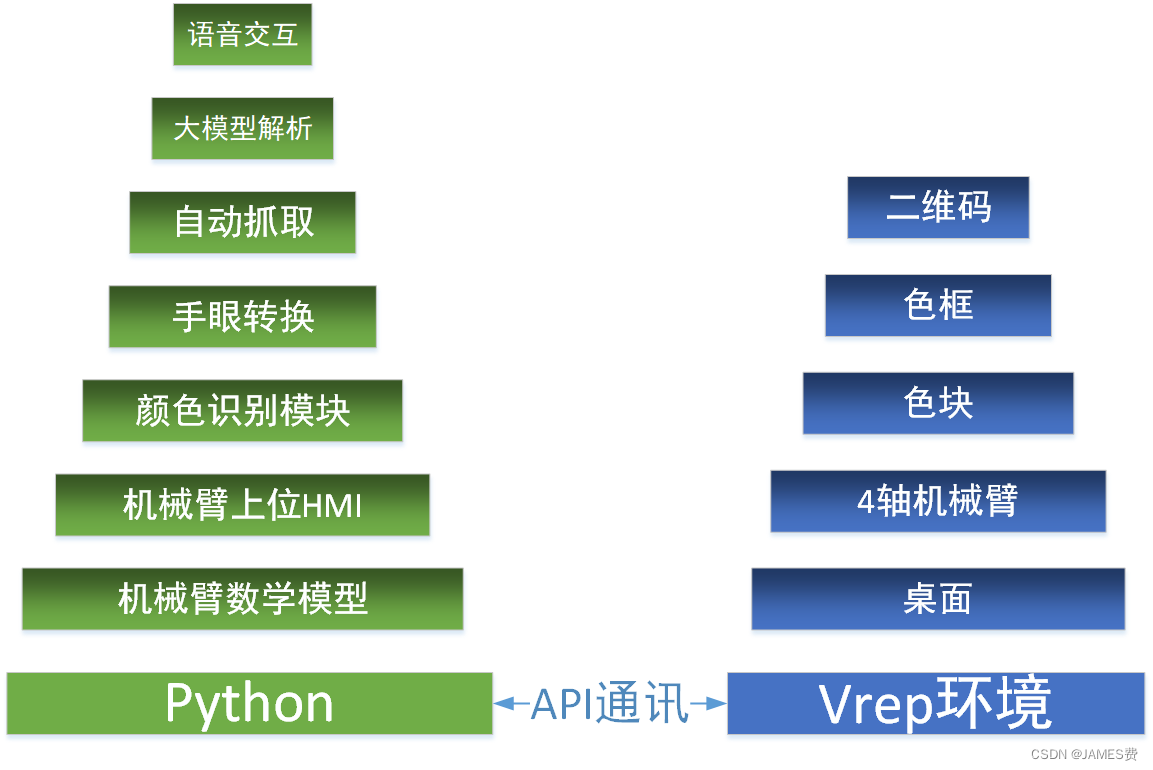
首先,我们将通过搭建一个VREP仿真环境来进行实验和测试。这个环境可以模拟真实的机器人工作场景,并且提供了一种安全和可控的方式进行研究。
接下来,我们将实现仿真环境与python环境的远程连接,以便通过编程方式控制机器人的动作和行为。
然后,我们将根据机械臂的物理结构构建一个逆解程序,用于计算机器人的关节角度,以实现抓取动作。
为了方便操控机器人,我们将构建一个机器人**远操上位机HMI(**人机界面),通过这个界面可以直观地控制机器人的运动。
为了实现色块的自动识别,我们将构建一个视觉模块,用于检测和识别目标色块的位置。
接下来,我们需要实现桌面坐标与机械臂坐标的映射,这样机器人才能准确地抓取目标。
为了实现更加智能的交互,我们将实现手眼的联动,通过机器人与视觉系统的配合,提高机器人的感知能力和操作精度。
为了增加机器人的交互性,我们将接入ollama的qwen或llama3大模型,使机器人能够解析人类的语音指令。