今日继续学习树莓派4B 4G:(Raspberry Pi,简称RPi或RasPi)
本人所用树莓派4B 装载的系统与版本如下:
版本可用命令 (lsb_release -a) 查询:
Opencv 版本是4.5.1:
今日尝试使用树莓派的TTL串口进行收发数据:
文章提供测试代码讲解,整体代码贴出、测试效果图
目录
串口预设置:
关闭串口shell,打开串口调试:
查看默认串口分配:
安装serial库:
(Python)TTL串口收发数据:
TTL串口收发测试效果图:
安装minicom(串口调试助手):
启动使用minicom:
测试minicom:
设置/退出minicom:
网上学习资料贴出:
串口预设置:
关闭串口shell,打开串口调试:
sudo raspi-config

查看默认串口分配:
树莓派有两个串口可以使用,一个是硬件串口(/dev/ttyAMA0),另一个是mini串口(/dev/ttyS0)。硬件串口有单独的波特率时钟源,性能好,稳定性强;mini串口功能简单,稳定性较差,波特率由CPU内核时钟提供,受内核时钟影响。
ls /dev/ser* -al
这个默认串口分配可以更改,我们使用用到的就是serial0,serial1则是蓝牙端口的串口

安装serial库:
sudo apt-get install python-serial
(Python)TTL串口收发数据:
代码写法1如下:
# coding: utf-8 # 明确指定编码 import serial ser = serial.Serial("/dev/ttyS0", 115200) print('serial test start...\r\n') ser.write(b"Hello World!\r\n") # 注意这里使用了字节字符串,因为 write 方法需要字节 try: while True: ser.write(ser.read()) # 发送读取到的数据 except KeyboardInterrupt: ser.close()代码写法2如下:
# coding: utf-8 import serial import time # 打开串口 ser = serial.Serial("/dev/ttyS0", 115200) def main():while True:# 获得接收缓冲区字符count = ser.inWaiting()if count != 0:# 读取内容并回显recv = ser.read(count)ser.write(recv)# 清空接收缓冲区ser.flushInput()# 必要的软件延时time.sleep(0.1)if __name__ == '__main__':try:main()except KeyboardInterrupt:if ser != None:ser.close()
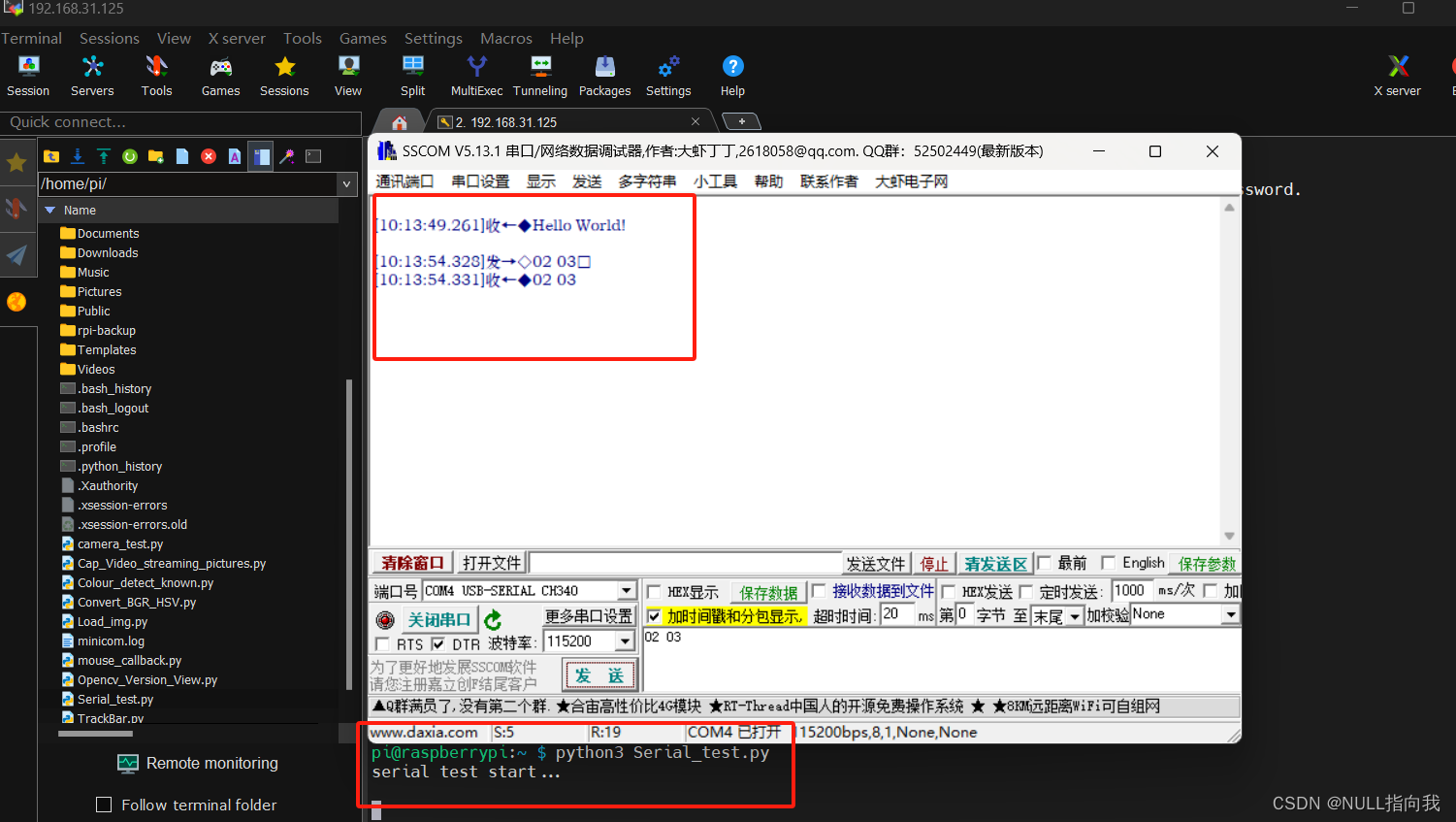
TTL串口收发测试效果图:
写法1测试效果如下:
写法2测试效果如下:

安装minicom(串口调试助手):
sudo apt-get install minicom
启动使用minicom:
minicom -D /dev/ttyS0 -b 115200
#-b代表波特率,-D代表端口,/dev/ttyAMA0(ttyS0) 类似于windows中的COM
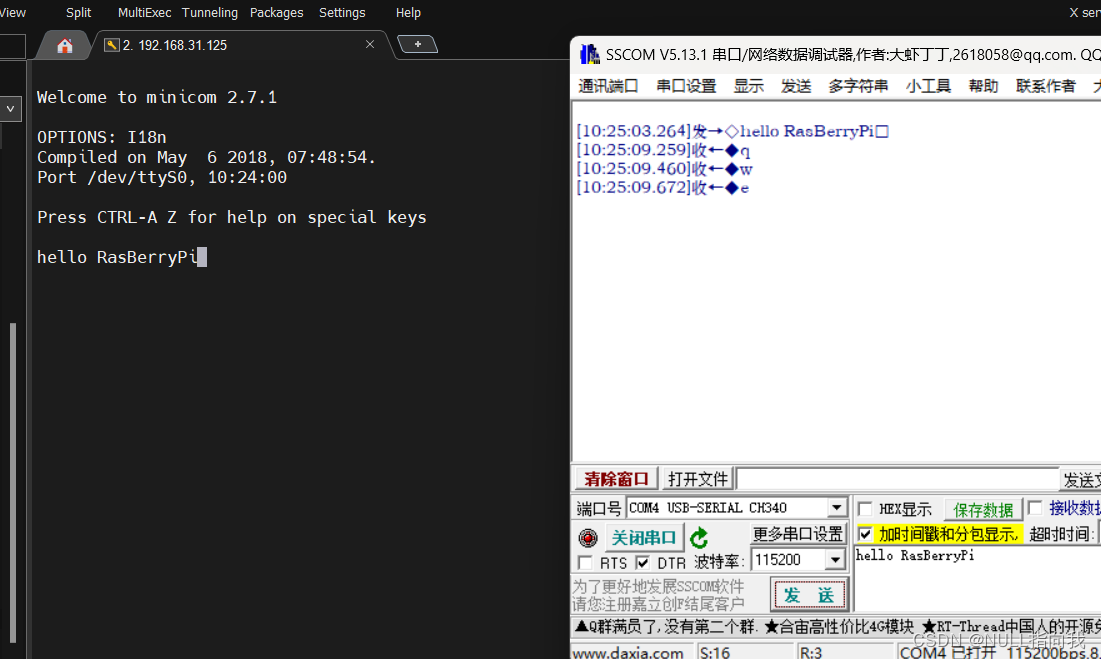
测试minicom:
下方会显示接受到的数据,而我们发送的不会显示:
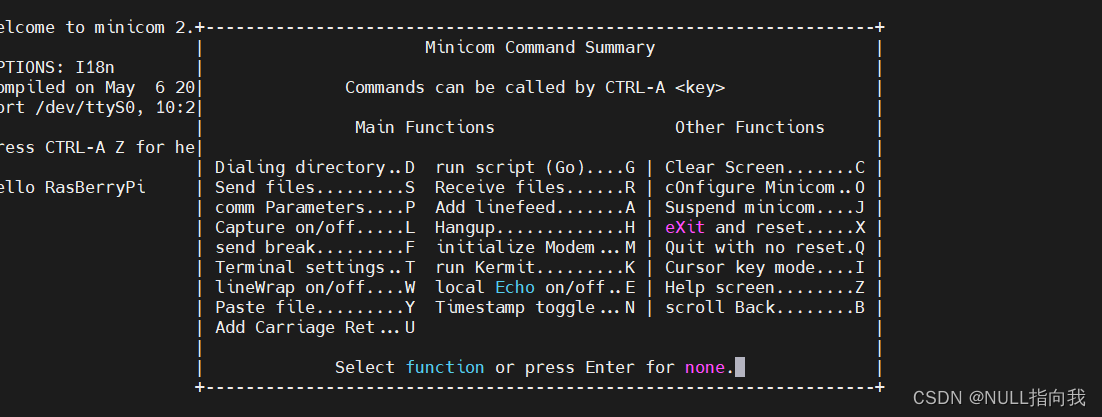
设置/退出minicom:
按下Ctrl+A:首先,你需要按下Ctrl键和A键同时,这会将你带入minicom的设置状态。
按下Z:接着,在按下Ctrl+A之后,再按下Z键。这将会显示minicom的帮助菜单或者设置菜单。
按下Q:在帮助菜单或设置菜单中,你可以通过按Q键来退出minicom。这将不会复位modem,而是直接退出minicom。

网上学习资料贴出:
【树莓派】树莓派配置串口通讯-CSDN博客