硬件原理
步进电动机
步进电动机(Step Motor 或 Stepper Motor)是一种将电脉冲信号转换成对应的角位移或线位移的电动机。与普通电动机不同,步进电动机每接收到一个脉冲信号,就会按设定的角度(步距角)转动一个步距。
工作原理
步进电动机的运转原理基于电磁感应和磁场相互作用。以下是其基本工作原理:
- 定子和转子:步进电动机由定子和转子组成。定子上有多个电磁线圈(通常称为相),当这些线圈通电时,会产生磁场。
- 脉冲驱动:控制器向步进电动机的线圈依次发送脉冲信号,每个脉冲信号会使定子的某一组线圈通电,形成磁场吸引转子的齿,使其转动一定的角度(步距角)。
- 步距角:步进电动机的步距角是由其机械结构决定的,通常为1.8°、0.9°等,这决定了每个脉冲信号转动的角度。
特点
- 精确控制:由于每个脉冲信号对应一个固定的角度转动,步进电动机适用于需要精确位置控制的场合。
- 开环控制:通常情况下,步进电动机不需要反馈系统就可以实现精确定位(开环控制),简化了控制系统的设计。
- 持久力矩:步进电动机在低速时具有较大的转矩,并能在停止时保持位置不变(保持转矩)。
- 启动和停止迅速:步进电动机可以在很短的时间内达到全速,并能迅速停止。
应用
步进电动机广泛应用于需要精确控制的领域,例如:
- 3D打印机:用于控制打印头的精确移动。
- 数控机床:用于控制刀具的位置。
- 自动化设备:如机器人、输送带等。
- 办公设备:如打印机、复印机的纸张进出机构。
控制方式
步进电动机的控制方式有多种,常见的包括:
- 单极性驱动:每个线圈只使用一个电流方向。
- 双极性驱动:每个线圈可以使用两个电流方向,提供更大的转矩。
- 全步驱动:每个脉冲信号使电动机转动一个完整的步距角。
- 半步驱动:每个脉冲信号使电动机转动半个步距角,提高分辨率。
- 微步驱动:通过细分步距角,提高控制精度和运行平稳性。
优点和缺点
优点:
- 精确定位和重复性好。
- 控制简单,易于实现开环控制。
- 持续转矩和保持转矩较大。
缺点:
- 效率较低,容易发热。
- 高速性能较差,转矩随速度增加而下降。
- 容易产生共振现象,导致运行不平稳。
通过合理设计和选择控制方式,步进电动机在现代自动化和精密控制领域得到了广泛应用。
自整角机
自整角机(Synchro)是一种用于角位移测量和信号传输的电机装置。它能够将一个旋转的机械角度转换为电信号,或者将电信号转换为旋转的机械角度。自整角机广泛应用于航空航天、导航、雷达、自动化控制等领域。
工作原理
自整角机通常由定子和转子两部分组成,其工作原理类似于变压器,通过电磁感应将机械角度转换为电信号,或将电信号转换为机械角度。
- 定子:定子上有多个线圈,通常为三个(称为S1、S2、S3),这些线圈按120度均匀分布。
- 转子:转子上有一个线圈,称为R线圈。
自整角机可以工作在以下两种模式之一:
- 发射模式(TX):自整角机作为传感器使用,机械角度输入,通过转子的转动在定子线圈中感应出对应的电信号输出。
- 接收模式(TR):自整角机作为执行器使用,电信号输入,通过定子线圈的激励使转子转动到对应的机械角度。
特点
- 精确角度测量:自整角机能够精确地测量和传输机械角度。
- 同步性好:多个自整角机可以通过电信号实现同步转动,适用于需要多个部件同步操作的场合。
- 抗干扰能力强:由于自整角机工作在交流电环境下,抗电磁干扰能力较强。
应用
自整角机在多个领域有广泛应用,包括但不限于:
- 航空航天:用于飞机、导弹等的姿态控制和导航系统中,精确测量和传输角度信息。
- 雷达:用于雷达天线的方位角和俯仰角测量与控制。
- 自动化控制:用于精确控制旋转机械的角度位置,如数控机床、机器人等。
- 导航设备:在船舶和潜艇的导航系统中,用于罗盘角度测量和传输。
控制方式
自整角机的控制主要依赖于相位检测和解码器:
- 相位检测:通过检测定子线圈中的电压相位,确定转子的位置。
- 解码器:将自整角机输出的交流电信号转换为数字信号,供控制系统使用。
优点和缺点
优点:
- 高精度:能够提供精确的角度测量和传输。
- 高可靠性:结构简单,使用寿命长,适合恶劣环境下工作。
- 实时性好:角度变化能够即时反映到电信号上,实现实时控制。
缺点:
- 复杂的电路设计:需要复杂的电子电路进行信号处理。
- 成本较高:精密的机械和电子元件使得自整角机的制造成本较高。
- 体积较大:与某些现代电子传感器相比,自整角机的体积较大。
实例应用
一个具体的应用实例是飞机的姿态指示器。自整角机安装在飞机的各个运动部件上,测量这些部件的角度,并将角度信号传输到驾驶舱内的仪表上,实时显示飞机的姿态信息。
综上所述,自整角机是精密角度测量和信号传输的重要设备,虽然有一定的缺点,但在需要高精度和高可靠性的场合,它仍然是不可替代的选择。
环形变压器
环形变压器(Toroidal Transformer)是一种特殊类型的变压器,其核心由环形铁芯(通常是铁粉、硅钢片或铁氧体材料)构成。环形变压器广泛应用于音频设备、电源设备、医疗设备、工业控制和仪器仪表等领域,因其高效率、低噪音和优良的电磁兼容性受到青睐。
工作原理
环形变压器的基本工作原理与其他类型的变压器相同,基于电磁感应原理。主要部分包括:
- 环形铁芯:用于引导磁通量,减少磁漏。其环形结构可以更好地均匀分布磁场,减少磁损耗。
- 初级线圈和次级线圈:绕制在环形铁芯上,通过电磁感应将初级线圈上的交流电压转换为次级线圈上的交流电压。线圈的匝数比决定了电压变换比。
特点
- 高效率:由于环形铁芯具有较低的磁阻和较少的磁漏,环形变压器的效率通常较高。
- 低噪音:环形变压器的环形铁芯结构能够有效减少电磁噪音和振动噪音。
- 低电磁干扰(EMI):环形铁芯能够更好地约束磁场,减少对周围设备的电磁干扰。
- 紧凑结构:环形变压器体积较小,重量较轻,适合空间有限的应用场合。
优点和缺点
优点:
- 高效率和低损耗:磁路短且闭合性好,铁芯材料利用率高,铁损和铜损较小。
- 低噪音:由于结构紧凑,机械噪音和电磁噪音都较低。
- 低漏磁:磁场集中在铁芯内部,外部漏磁较少,对周围电路和设备的干扰较小。
- 体积小:环形变压器结构紧凑,适合安装在空间有限的设备中。
缺点:
- 制造工艺复杂:环形变压器的铁芯和绕组工艺较为复杂,制造成本较高。
- 安装固定不便:由于其特殊的形状,安装和固定较为麻烦,需要专用的固定夹具。
- 难以维修:环形变压器的绕组和铁芯紧密缠绕,一旦出现故障,维修较为困难。
应用
- 音频设备:环形变压器在音频设备中广泛应用,因其低噪音和低电磁干扰特性,可以提供清晰的音质。
- 电源设备:在各种电源设备中,环形变压器因其高效率和稳定性,被用于电源变压器和隔离变压器。
- 医疗设备:环形变压器在医疗设备中广泛应用,因其低漏磁和低噪音特性,确保了医疗设备的安全和精确性。
- 工业控制:在工业自动化和控制系统中,环形变压器提供稳定的电源转换和隔离,保证系统的可靠运行。
- 仪器仪表:在精密仪器和测量设备中,环形变压器因其高稳定性和低干扰特性,被用于提供精确的电源转换和信号隔离。
设计和选择
设计和选择环形变压器时,需要考虑以下因素:
- 电压和电流要求:根据应用需求确定初级和次级线圈的电压和电流规格。
- 功率要求:根据负载需求确定变压器的额定功率。
- 频率特性:根据应用环境确定工作频率,选择适当的铁芯材料和绕组结构。
- 温升和散热:考虑变压器在工作时的温升和散热要求,确保变压器在额定功率下稳定工作。
综上所述,环形变压器以其高效率、低噪音和低电磁干扰等优点,广泛应用于各种需要精密电源转换和信号隔离的领域。虽然其制造成本较高,但在高要求应用中,其优势是非常显著的。
舵机
舵机(Servo Motor)是一种专门用于精确控制角度、速度和位置的执行机构。它们在机器人、遥控飞机、工业自动化、汽车、以及各种消费电子设备中广泛应用。舵机由一个电动机、减速齿轮组、控制电路和位置反馈装置(通常是一个电位计)组成。
工作原理
舵机的工作原理基于负反馈控制系统。其基本工作流程如下:
- 输入信号:控制器发送一个脉宽调制(PWM)信号到舵机。这个信号决定了舵机应该达到的目标位置。
- 信号处理:舵机内部的控制电路接收并解码这个信号,将其转换为目标位置。
- 电动机驱动:控制电路驱动电动机,带动齿轮组转动,使舵机轴转动到目标位置。
- 位置反馈:舵机内的电位计或其他位置传感器实时监测舵机轴的位置,并将当前位置反馈给控制电路。
- 误差修正:控制电路将当前位置与目标位置进行比较,如果存在误差,则继续驱动电动机修正位置,直到误差在允许范围内。
特点
- 高精度:舵机能够精确控制转动角度,通常可以达到±0.5度甚至更高的精度。
- 快速响应:舵机能够快速响应控制信号,实现迅速转动和定位。
- 持久力矩:在保持位置时,舵机可以提供持续的扭矩。
- 简单控制:通过简单的PWM信号即可控制舵机,无需复杂的控制算法。
分类
- 模拟舵机(Analog Servo):使用模拟电路控制,接收连续的PWM信号。
- 数字舵机(Digital Servo):使用数字电路控制,通常具有更快的响应速度和更高的保持力矩。
应用
- 机器人:用于控制机械臂、关节和移动平台的精确定位。
- 遥控模型:如遥控飞机、船只和汽车,用于控制方向舵、油门和其他运动部件。
- 自动化设备:如数控机床、3D打印机,用于精确定位和运动控制。
- 智能家居:用于门锁、窗帘和摄像头的自动控制。
使用方法
- 连接电源:通常为4.8V到6V的直流电源。
- 连接控制信号:将PWM控制信号连接到舵机的控制线。
- 发送控制信号:通过微控制器或信号发生器发送PWM信号,控制舵机的转动。
选择舵机时的考虑因素
- 扭矩:根据应用需求选择适当的扭矩规格。
- 速度:根据应用需求选择适当的转动速度。
- 电压:确保电源电压与舵机要求匹配。
- 尺寸和重量:根据安装空间和负载需求选择适当的尺寸和重量。
- 控制精度:根据控制需求选择模拟或数字舵机。
示例代码
以下是一个使用Arduino控制舵机的示例代码:
#include <Servo.h>
Servo myservo; // 创建舵机对象
void setup() {
myservo.attach(9); // 将舵机连接到数字9号引脚 }
void loop() {
myservo.write(90); // 将舵机转动到90度
delay(1000); // 等待1秒
myservo.write(0); // 将舵机转动到0度
delay(1000); // 等待1秒 }
在这个例子中,舵机被连接到Arduino的9号引脚,通过myservo.write(angle)函数可以将舵机转动到指定的角度。
综上所述,舵机是一种高精度、快速响应的执行机构,广泛应用于各种需要精确控制的场合。通过简单的PWM信号即可实现对舵机的控制,适合各种自动化和机器人应用。
直流电机
直流电机(Direct Current Motor, DC Motor)是一种通过直流电源驱动的电动机,能够将电能转换为机械能,广泛应用于工业、交通、家用电器、电子设备等领域。根据结构和工作原理的不同,直流电机可以分为有刷直流电机(Brushed DC Motor)和无刷直流电机(Brushless DC Motor)。
工作原理
直流电机的基本工作原理是电磁感应原理。通过在电机线圈中通入直流电流,产生磁场,与电机磁极之间的相互作用产生转矩,从而使电机转动。
有刷直流电机
有刷直流电机由定子、转子、换向器和电刷组成。
- 定子:定子通常由固定的磁铁或电磁铁构成,产生稳定的磁场。
- 转子:转子上有线圈,通过换向器和电刷与外部电源连接。电流通过转子线圈产生磁场,与定子磁场相互作用,产生转矩。
- 换向器和电刷:换向器是固定在转子轴上的圆环,由多个导电片构成,电刷与换向器接触,通过电刷和换向器的滑动接触,实现电流的换向,确保转子线圈中的电流方向周期性变化,从而保持转矩方向不变。
无刷直流电机
无刷直流电机由定子和转子组成,定子上安装有线圈,转子上安装有永久磁铁。通过电子换向器代替机械换向器,控制电流的方向。
- 定子:定子上有多个线圈,通过电子控制电路控制电流的通断和方向。
- 转子:转子上安装有永久磁铁,形成恒定的磁场。
- 电子换向器:通过传感器(如霍尔传感器)检测转子位置,并控制定子线圈的通断和电流方向,达到换向目的。
特点
有刷直流电机:
- 优点:控制简单、成本低、启动转矩大。
- 缺点:电刷和换向器容易磨损,需要定期维护,噪音较大,效率较低。
无刷直流电机:
- 优点:高效率、长寿命、低噪音、免维护。
- 缺点:控制电路复杂、成本较高。
应用
直流电机在各个领域有广泛应用,包括但不限于:
- 工业设备:用于各类驱动系统,如机床、输送带、泵等。
- 交通工具:如电动车、电动汽车、电动自行车等。
- 家用电器:如洗衣机、吸尘器、电风扇等。
- 电子设备:如电脑风扇、打印机、光驱等。
- 机器人:用于驱动机器人的各个关节和运动部件。
控制方法
直流电机的控制方法主要包括:
- 电压控制:通过调节电机两端的电压来控制电机的转速和转向。
- PWM控制:通过脉宽调制(PWM)技术,调节电机的有效电压,从而控制转速。
- 速度反馈控制:通过速度传感器实时监测电机转速,并调整输入电压或PWM信号,保持恒定转速。
- 位置控制:通过位置传感器实时监测电机位置,并调整输入信号,实现精确定位。
示例代码
以下是使用Arduino控制有刷直流电机的示例代码,通过PWM信号控制电机转速:
const int motorPin = 9; // 电机连接到数字9号引脚
void setup() {
pinMode(motorPin, OUTPUT); // 设置引脚为输出模式 }
void loop() {
for (int speed = 0; speed <= 255; speed++) {
analogWrite(motorPin, speed); // 设置PWM占空比,控制电机转速
delay(10); }
for (int speed = 255; speed >= 0; speed--) {
analogWrite(motorPin, speed); // 设置PWM占空比,控制电机转速
delay(10); } }
在这个示例中,电机连接到Arduino的9号引脚,通过analogWrite(pin, value)函数设置PWM信号的占空比,从而控制电机的转速。
选择直流电机时的考虑因素
- 额定电压和电流:选择符合应用需求的电压和电流规格。
- 转矩和转速:根据负载需求选择适当的转矩和转速。
- 效率:考虑电机的能效等级,以提高整体系统的能效。
- 体积和重量:根据安装空间和负载需求选择适当的尺寸和重量。
- 寿命和维护:根据使用环境和频率,选择适当的电机类型(有刷或无刷)。
综上所述,直流电机因其易于控制和广泛适应性,广泛应用于各个行业和领域。选择合适的直流电机和控制方法,可以有效提升系统性能和效率。
软件部分
智能水产养殖系统的软件设计是确保系统各功能模块协调工作的关键部分。以下是软件设计的主要内容和步骤:
1. 系统架构设计
在软件设计阶段,首先要确定系统的整体架构,包括采用的操作系统、任务划分和模块化设计。通常情况下,可以选择uC/OS-II或者FreeRTOS作为嵌入式操作系统,用于任务管理和资源分配。
2. 初始化阶段
时钟初始化(RCC):配置微控制器的时钟系统,确保系统运行在预期的时钟频率上,例如设置为168MHz以达到最高性能。
I/O初始化(GPIO):定义各个GPIO口的输入输出功能,包括按键、显示屏幕和通信口(例如USART)。
通信初始化(USART):配置USART串口的参数,包括数据位、校验位和波特率,以实现与外部设备(如PC或其他微控制器)的通信。
ADC初始化:配置模数转换器(ADC)以便于从传感器模块中读取水温、水质、沼气浓度等环境参数。
PWM初始化:设置PWM波输出,用于控制电机转速等需要精确控制的设备。
液晶初始化:初始化液晶屏幕,确保能够正确显示系统状态和环境数据。
3. 主循环
系统进入主循环后,不断执行以下操作:
-
触屏按键检测:检测触摸屏幕是否有按键按下,如果有则进入手动控制模式。
-
触发器状态检测:检测鱼塘上的触发器反馈信号,如果有信号则启动摄像头进行环境监视。
-
环境数据采集:定时或根据需要从各传感器模块采集水温、水质、沼气浓度、光线强度等数据。
-
数据处理和显示:根据采集的数据进行处理,例如判断水质等级,计算沼气浓度变化趋势等,并将结果显示在液晶屏上。
4. 手动控制模式
当触屏按键被按下时,系统进入手动控制模式:
-
电机控制:通过触摸屏上的滚动条或按钮控制电机的转速或方向。
-
用户交互:根据用户的操作反馈状态,例如显示当前电机转速或操作确认信息。
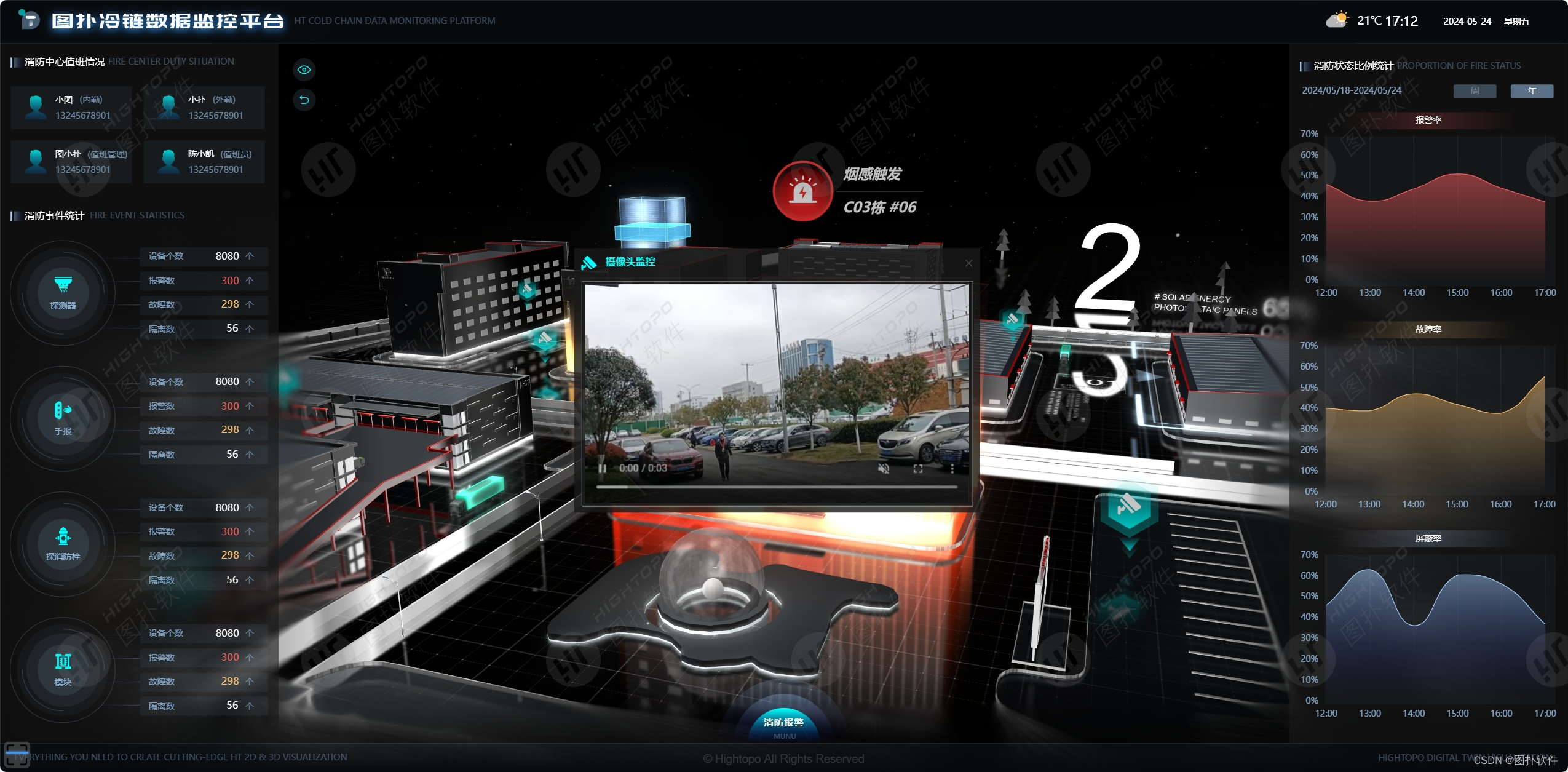
5. 环境监视模式
当触发器反馈信号时,系统启动摄像头进行环境监视:
-
摄像头控制:打开摄像头并实时显示监控画面。
-
报警处理:根据监控画面分析环境状态,例如检测异常情况并进行报警或记录。
6. 数据存储和管理
根据系统需求,可能需要将采集的环境数据进行存储或上传到云端服务器进行长期数据分析和管理。
7. 系统调试和优化
在软件开发的最后阶段,进行系统的调试和优化,确保系统稳定性、响应速度和功耗等性能指标符合设计要求。
本软件采用C语言作为开发语言,开发环境选用了Keil公司开发的ARM开发工具。该工具专为基于ARM核的微控制器嵌入式应用程序开发而设计,适合从入门者到专业工程师的不同开发需求。Keil MDK集成了行业标准的Keil C编译器、宏汇编器、调试器以及实时内核等组件,全面支持所有基于ARM架构的设备,包括本项目所用的STM32F10x系列芯片。
在调试和仿真方面,本项目使用SEGGER公司推出的J-LINK JTAG仿真器。J-LINK能与Keil集成开发环境实现无缝连接,支持所有ARM7/ARM9内核的芯片,以及Cortex-M3/Cortex-M4内核,完美适配本项目所选用的STM32F10x芯片。
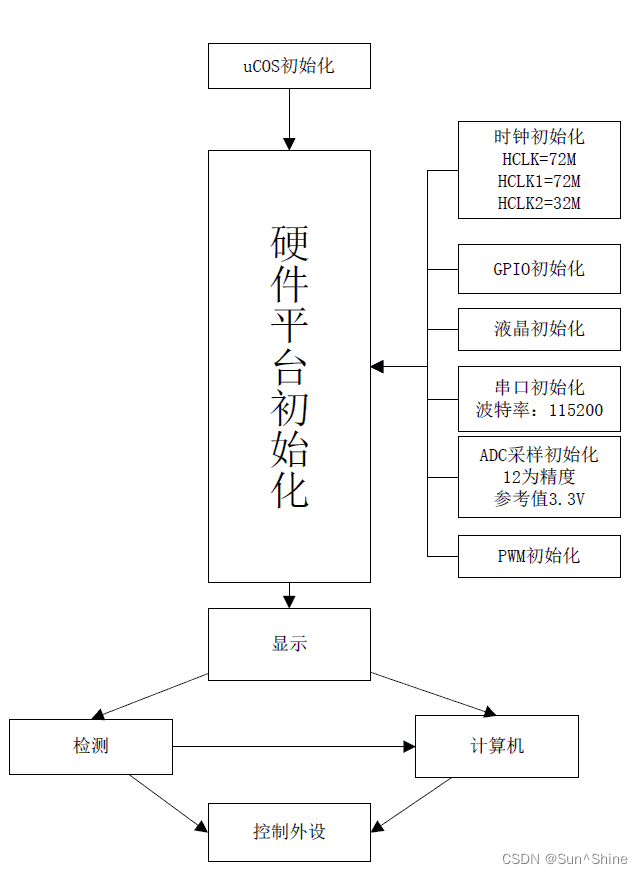
首先,程序进入初始化阶段,对芯片的时钟(RCC),I/O口(GPIO),串口(USART),ADC,PWM波和液晶进行初始化。系统时钟被设置为168MHz,以保证程序运行速度最快。I/O口分别被定义为输入(按键)、输出(显示)和通信(USART)。对于USART异步串行通信,需要初始化数据位、校验位和波特率。
接着,程序进入循环判断阶段。如果触屏按键被按下,系统将进入手动控制模式,用户可以通过触摸屏上的滚动条控制电机的转动速率。如果没有触屏按键按下,但鱼塘上的触发器反馈了电平信号,系统则启动摄像头对环境进行监视。在没有任何外界触发的情况下,主控制器将仅显示当前的水温、水质、沼气浓度和光线强度等信息。
软件部分注意事项
在设计智能水产养殖系统的软件部分时,有几个关键的注意事项可以帮助确保系统的稳定性、可靠性和性能优化:
1. 系统稳定性和可靠性
-
错误处理和异常情况处理:在程序中加入适当的错误处理机制,例如异常情况下的恢复策略或报警机制,确保系统能够在出现问题时及时响应并采取适当的措施。
-
数据校验和完整性:对从传感器模块采集的数据进行校验,确保数据的准确性和完整性。特别是在长时间运行的情况下,要考虑数据可能会因噪声或传感器故障而出现异常。
2. 性能优化
- 程序效率:考虑到系统资源有限的情况下,优化程序的效率是至关重要的。可以采用以下策略:
- 使用DMA(直接存储器访问)来加快数据传输速度,减少CPU负载。
- 合理利用中断机制,及时响应重要事件,减少轮询的资源消耗。
- 避免使用过多的延时函数或忙等待,改用定时器或RTOS的延时函数来实现任务调度和时间控制。
3. 数据处理和算法优化
-
数据处理算法:选择合适的数据处理算法,确保在保证准确性的同时,尽可能高效地处理数据。例如,使用适当的滤波算法来消除传感器数据中的噪声。
-
实时性要求:根据系统的实时性要求,设计合理的数据采集和处理策略。对于需要快速响应的事件,应设计相应的中断服务程序或任务优先级。
4. 软件与硬件的协同工作
-
硬件驱动和接口设计:确保软件与硬件的接口设计符合规范和标准。在软件开发初期,可以先模拟硬件接口的功能,进行软件调试和验证。
-
时序和时钟管理:特别是在高性能系统中,要严格管理各个模块的时钟和时序要求,确保信号稳定性和数据的正确传输。
5. 系统调试和测试
-
模块化测试:采用模块化的开发和测试策略,确保每个模块的功能和接口都经过充分测试和验证。
-
整体系统测试:在软件集成完成后,进行整体系统测试,模拟实际使用场景,检查系统的稳定性、响应速度和数据准确性。
6. 文档和版本控制
-
文档化:及时记录软件设计的各个阶段,包括需求分析、设计文档、测试报告等,便于后续维护和版本升级。
-
版本控制:采用版本控制工具(如Git)管理软件代码,确保对历史版本的追溯和代码修改的跟踪。
通过以上注意事项的综合考虑和实施,可以有效地提高智能水产养殖系统的软件质量和系统整体性能,保证系统在各种环境条件下的稳定运行和可靠性。