目录
一、前言
二、项目简介
1.功能详解
2.主要器件
三、原理图设计
四、PCB硬件设计
1.PCB图
2.PCB板打样焊接图
五、程序设计
六、实验效果
七、资料内容
项目分享
一、前言
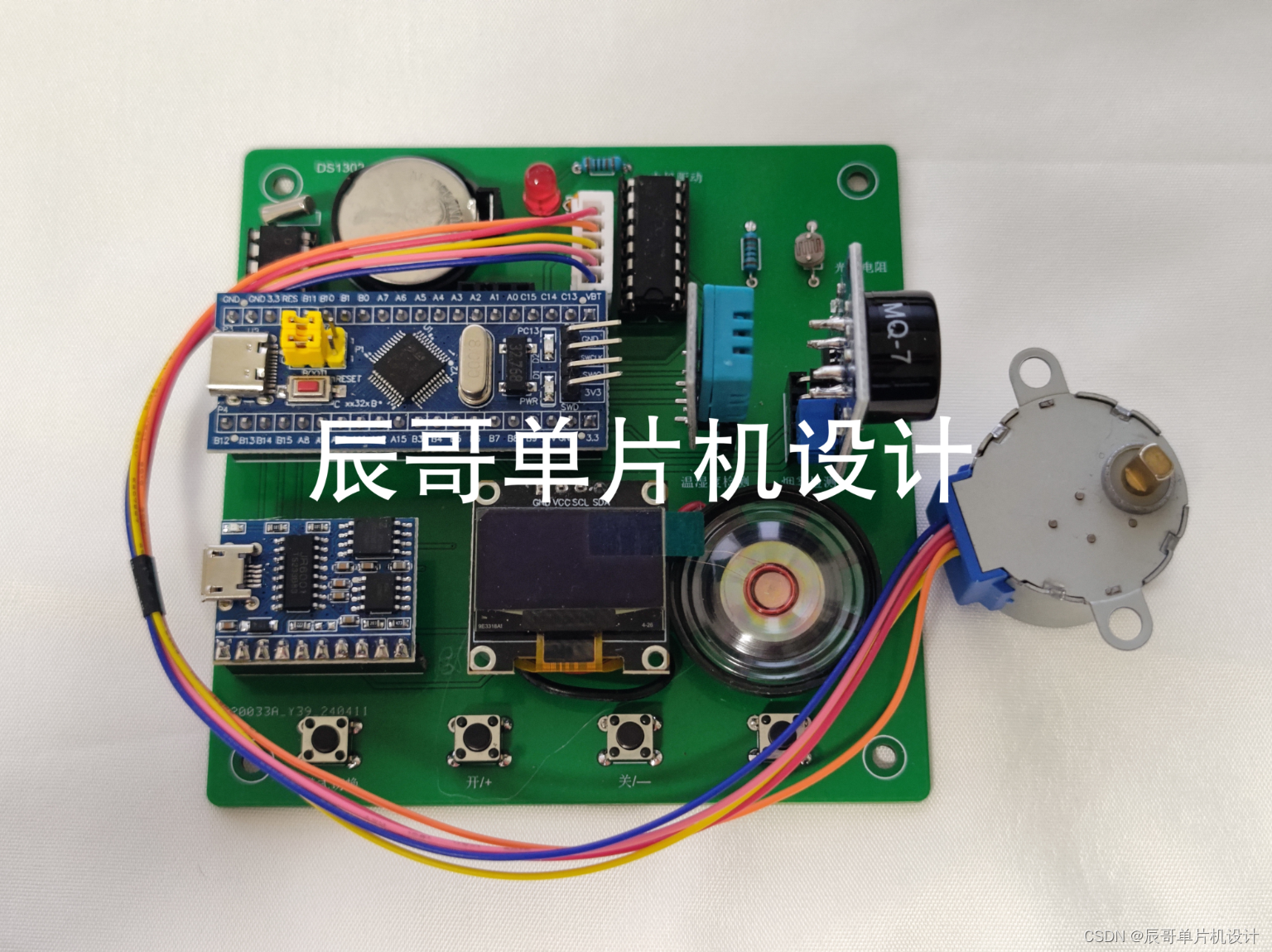
项目成品图片:
哔哩哔哩视频链接:
https://www.bilibili.com/video/BV1vC411z7hY/?share_source=copy_web&vd_source=097fdeaf6b6ecfed8a9ff7119c32faf2
(资料分享见文末)
二、项目简介
1.功能详解
基于STM32智能窗帘系统。功能如下:
- 光强采集:光敏电阻实时采集环境光强度数据
- 温湿度采集:DHT11温湿度传感器采集环境温湿度
- 危险气体监测:MQ-7判断危险气体是否超标(超标板子指示灯闪烁)
- 窗帘控制:步进电机模拟窗帘驱动开闭
- OLED显示:当前时间,温湿度数据,模式信息
- 实时时钟:DS1302时钟模块读取记录当前时间
- 蓝牙APP控制:手机端蓝牙app远程遥控窗帘
- 控制模式:JR6001语音模块驱动扬声器播报提示音
- 控制模式:支持四种窗帘控制模式:自动模式、手动模式、定时模式和遥控模块,可按键切换
2.主要器件
- STM32F103C8T6最小系统板
- OLED显示屏(4针I2C协议)
- 光敏电阻
- DHT11温湿度传感器
- MQ-7一氧化碳传感器
- 28BYJ51步进电机
- ULN2003步进电机驱动芯片
- 蓝牙模块(BT04-A)
- JR6001串口语音模块
- 扬声器
三、原理图设计

四、PCB硬件设计
1.PCB图


2.PCB板打样焊接图

五、程序设计
int main(void)
{ u16 ii=0;delay_init();NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级uart_init(9600); //语音模块串口初始化usart3_init(9600); //蓝牙使用DHT11_Init(); Adc_Init();Moto_Init();ds1302_gpio_init(); ds1032_init(); //时间设置ds1032_read_realTime(); //读取实时数据 KEY_Init();MQ_Init();LED_Init();OLED_Init(); //屏幕初始化TIM3_Int_Init(719,7199); printf("AF:30");//声音调到31档 最大delay_ms(100);delay_ms(1000);printf("A7:00003");//欢迎使用delay_ms(1000);OLED_CLS();while(1){if(Flag_caidan==1)//自动模式{delay_ms(500);Flag_adc=Get_Adc_Average(0,10);delay_ms(500); if(Flag_adc>1000&&Flag_dakai==0){printf("A7:00001");//打开TIM_Cmd(TIM3,DISABLE); for(ii=0;ii<Num_i;ii++){Motorcw_angle(1,3); MotorStop(); }TIM_Cmd(TIM3, ENABLE); Flag_dakai=1;dakai=1;}if(Flag_adc<1000&&Flag_dakai==1){printf("A7:00002");//关闭TIM_Cmd(TIM3,DISABLE); for(ii=0;ii<Num_i;ii++){Motorccw_angle(1,3); MotorStop(); } TIM_Cmd(TIM3, ENABLE); Flag_dakai=0;dakai=0;}if(MQ==0){LED0 = !LED0;delay_ms(100);LED0 = !LED0;delay_ms(100);}}if(Flag_caidan==2)//手动模式{if(dakai==1&&Flag_dakai==0){printf("A7:00006");//打开TIM_Cmd(TIM3,DISABLE); for(ii=0;ii<Num_i;ii++){Motorcw_angle(1,3); MotorStop(); }TIM_Cmd(TIM3, ENABLE); Flag_dakai=1;}if(dakai==0&&Flag_dakai==1){printf("A7:00007");//关闭TIM_Cmd(TIM3,DISABLE); for(ii=0;ii<Num_i;ii++){Motorccw_angle(1,3); MotorStop(); }TIM_Cmd(TIM3, ENABLE); Flag_dakai=0;}}if(Flag_caidan==3)//定时模式{if(TimeRAM.kai==1&&Flag_dakai==0){ if(TimeRAM.hour_kai==TimeData.hour&&TimeRAM.minute_kai==TimeData.minute){printf("A7:00006");//打开TIM_Cmd(TIM3,DISABLE); for(ii=0;ii<Num_i;ii++){Motorcw_angle(1,3); MotorStop(); }TIM_Cmd(TIM3, ENABLE); Flag_dakai=1;}}if(TimeRAM.guan==1&&Flag_dakai==1){ if(TimeRAM.hour_guan==TimeData.hour&&TimeRAM.minute_guan==TimeData.minute){printf("A7:00007");//关闭TIM_Cmd(TIM3,DISABLE); for(ii=0;ii<Num_i;ii++){Motorccw_angle(1,3); MotorStop(); }TIM_Cmd(TIM3, ENABLE); Flag_dakai=0;}}}if(Flag_caidan==4)//遥控模式{if(dakai==1&&Flag_dakai==0){printf("A7:00006");//打开TIM_Cmd(TIM3,DISABLE);ii=0;for(ii=0;ii<Num_i;ii++){Motorcw_angle(1,3); MotorStop(); }TIM_Cmd(TIM3, ENABLE); Flag_dakai=1;}if(dakai==0&&Flag_dakai==1){printf("A7:00007");//关闭TIM_Cmd(TIM3,DISABLE); for(ii=0;ii<Num_i;ii++){Motorccw_angle(1,3); MotorStop(); }TIM_Cmd(TIM3, ENABLE); Flag_dakai=0;} }}
}六、实验效果


七、资料内容








![[图解]企业应用架构模式2024新译本讲解16-行数据入口2](https://img-blog.csdnimg.cn/direct/0cb7ec57d47642a694c3f05c836a40cb.png)