ROS2提供了四种通信方式:
话题-Topics
服务-Services
动作-Action
参数-Parameters
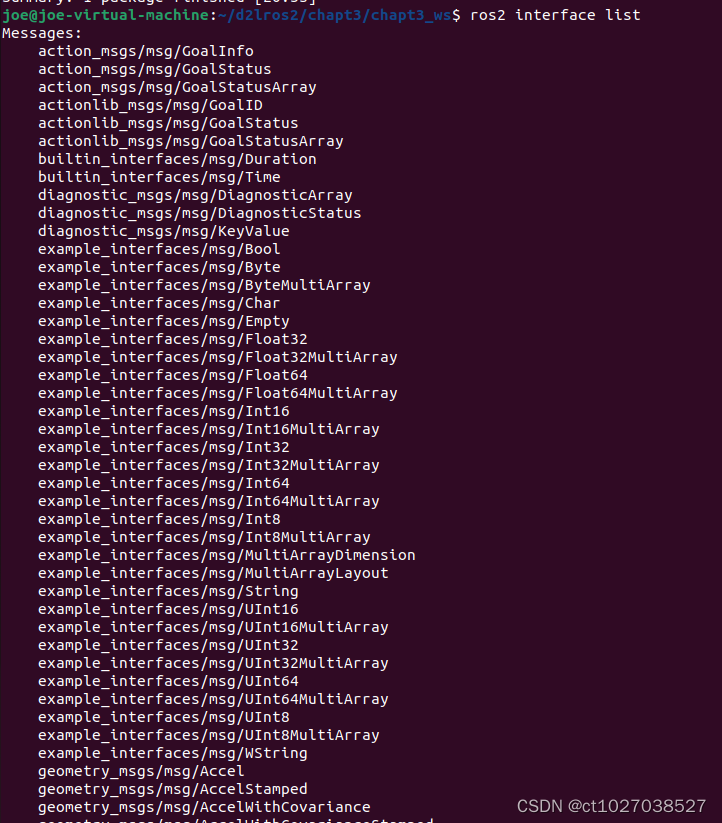
查看系统自定义接口命令
使用ros2 interface package sensor_msgs命令可以查看某一个接口包下所有的接口
除了参数之外,话题、服务和动作(Action)都支持自定义接口,每一种通信方式所适用的场景各不相同,所定义的接口也被分为话题接口、服务接口、动作接口三种。
创建自定义接口节点
ros2 pkg create example_ros2_interfaces --build-type ament_cmake --dependencies rosidl_default_generators geometry_msgs
话题接口格式:xxx.msg
int64 num
自定义话题接口格式:
话题接口,采用基础类型 RobotStatus.msg
uint32 STATUS_MOVEING = 1
uint32 STATUS_STOP = 1
uint32 status
float32 pose
话题接口,混合包装类型 RobotPose.msg
uint32 STATUS_MOVEING = 1
uint32 STATUS_STOP = 2
uint32 status
geometry_msgs/Pose pose
服务接口格式:xxx.srv
int64 a
int64 b
---
int64 sum
自定义服务接口格式:
服务接口MoveRobot.srv
# 前进后退的距离
float32 distance
---
# 当前的位置
float32 pose
动作接口格式:xxx.action
int32 order
---
int32[] sequence
---
int32[] partial_sequence
接口数据类型
根据引用方式不同可以分为基础类型和包装类型两类。
基础类型有(同时后面加上[]可形成数组)
bool
byte
char
float32,float64
int8,uint8
int16,uint16
int32,uint32
int64,uint64
string
包装类型
即在已有的接口类型上进行包含,比如
uint32 id
string image_name
sensor_msgs/Image
接口文件目录

修改CMakeLists.txt
# 添加下面的内容
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/RobotPose.msg"
"msg/RobotStatus.msg"
"srv/MoveRobot.srv"
DEPENDENCIES geometry_msgs
)
修改package.txt
<member_of_group>rosidl_interface_packages</member_of_group> #添加这一行
打包编译
colcon build --packages-select example_ros2_interfaces
查看所有接口定义
ros2 interface list
查看指定接口定义
ros2 interface show std_msgs/msg/String