1.vision mamba结构与原理
Mamba成功的关键在于S6模型,该模型为NLP任务设计,通过选择性扫描空间状态序列模型,将二次复杂度降低至线性。但由于视觉信号(如图像)的无序性,Mamba的S6模型不能直接应用,
设计了 2D-selective-scan(SS2D)模块。
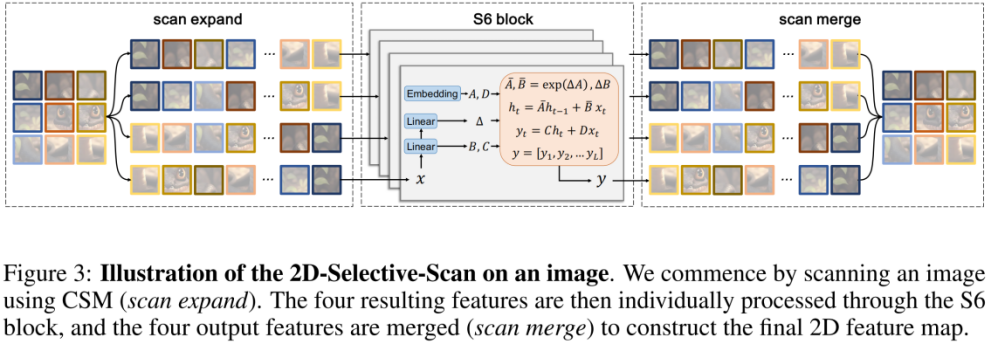
如上图所示,SS2D由三个部分组成:扫描expanding操作、S6块操作和扫描merging操作。如图2(a)所示,扫描expanding操作沿着四个不同的方向(左上到右下、左下到右上、右下到左上、右上到左下)将输入图像展开成序列。然后通过S6块对这些序列进行特征提取,确保各个方向的信息被彻底扫描,从而捕获不同的特征。随后,如图2(b)所示,扫描merging操作将来自四个方向的序列相加并合并,将输出图像恢复为与输入相同的大小。源自Mamba[16]的S6块在S4[17]之上引入了一种选择机制,通过根据输入调整SSM的参数。这使模型能够区分并保留相关信息,同时过滤掉不相关的信息。
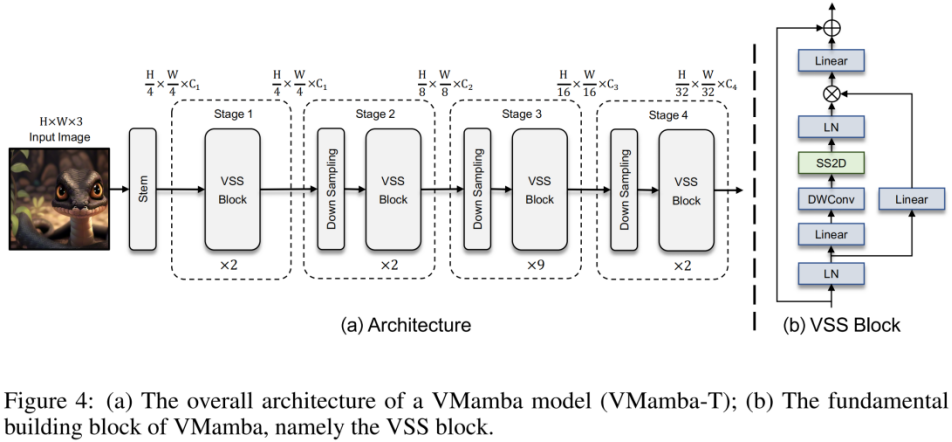
上图为本文提出的 VMamba 结构图。VMamba 的整体框架与主流的视觉模型类似,如上图 (b)所示。经过Layer Normalization后,输入被分成两个分支。在第一个分支中,输入经过一个线性层,然后是一个激活函数。在第二个分支中,输入通过线性层、深度可分离卷积和激活函数进行处理,然后输入到2D选择性扫描(SS2D)模块中进行进一步的特征提取。随后,使用Layer Normalization对特征进行归一化,然后使用第一个分支的输出执行逐元素的生成,以合并两条路径。最后,使用线性层混合特征,并将此结果与残差连接相结合,形成VSS块的输出。本文默认采用SiLU作为激活函数。
2.Vmamba(vision mamba)模块代码实现
import mathimport torch.nn as nnimport torch
import torch.nn.functional as F
from torch.cuda.amp import custom_bwd, custom_fwdfrom einops import rearrange, repeatfrom causal_conv1d import causal_conv1d_fn
import causal_conv1d_cuda
import selective_scan_cudaclass SelectiveScanFn(torch.autograd.Function):@staticmethoddef forward(ctx, u, delta, A, B, C, D=None, z=None, delta_bias=None, delta_softplus=False,return_last_state=False):if u.stride(-1) != 1:u = u.contiguous()if delta.stride(-1) != 1:delta = delta.contiguous()if D is not None:D = D.contiguous()if B.stride(-1) != 1:B = B.contiguous()if C.stride(-1) != 1:C = C.contiguous()if z is not None and z.stride(-1) != 1:z = z.contiguous()if B.dim() == 3:B = rearrange(B, "b dstate l -> b 1 dstate l")ctx.squeeze_B = Trueif C.dim() == 3:C = rearrange(C, "b dstate l -> b 1 dstate l")ctx.squeeze_C = Trueout, x, *rest = selective_scan_cuda.fwd(u, delta, A, B, C, D, z, delta_bias, delta_softplus)ctx.delta_softplus = delta_softplusctx.has_z = z is not Nonelast_state = x[:, :, -1, 1::2] # (batch, dim, dstate)if not ctx.has_z:ctx.save_for_backward(u, delta, A, B, C, D, delta_bias, x)return out if not return_last_state else (out, last_state)else:ctx.save_for_backward(u, delta, A, B, C, D, z, delta_bias, x, out)out_z = rest[0]return out_z if not return_last_state else (out_z, last_state)@staticmethoddef backward(ctx, dout, *args):if not ctx.has_z:u, delta, A, B, C, D, delta_bias, x = ctx.saved_tensorsz = Noneout = Noneelse:u, delta, A, B, C, D, z, delta_bias, x, out = ctx.saved_tensorsif dout.stride(-1) != 1:dout = dout.contiguous()# The kernel supports passing in a pre-allocated dz (e.g., in case we want to fuse the# backward of selective_scan_cuda with the backward of chunk).# Here we just pass in None and dz will be allocated in the C++ code.du, ddelta, dA, dB, dC, dD, ddelta_bias, *rest = selective_scan_cuda.bwd(u, delta, A, B, C, D, z, delta_bias, dout, x, out, None, ctx.delta_softplus,False # option to recompute out_z, not used here)dz = rest[0] if ctx.has_z else NonedB = dB.squeeze(1) if getattr(ctx, "squeeze_B", False) else dBdC = dC.squeeze(1) if getattr(ctx, "squeeze_C", False) else dCreturn (du, ddelta, dA, dB, dC,dD if D is not None else None,dz,ddelta_bias if delta_bias is not None else None,None,None)def selective_scan_fn(u, delta, A, B, C, D=None, z=None, delta_bias=None, delta_softplus=False,return_last_state=False):"""if return_last_state is True, returns (out, last_state)last_state has shape (batch, dim, dstate). Note that the gradient of the last state isnot considered in the backward pass."""return SelectiveScanFn.apply(u, delta, A, B, C, D, z, delta_bias, delta_softplus, return_last_state)def selective_scan_ref(u, delta, A, B, C, D=None, z=None, delta_bias=None, delta_softplus=False,return_last_state=False):"""u: r(B D L)delta: r(B D L)A: c(D N) or r(D N)B: c(D N) or r(B N L) or r(B N 2L) or r(B G N L) or (B G N L)C: c(D N) or r(B N L) or r(B N 2L) or r(B G N L) or (B G N L)D: r(D)z: r(B D L)delta_bias: r(D), fp32out: r(B D L)last_state (optional): r(B D dstate) or c(B D dstate)"""dtype_in = u.dtypeu = u.float()delta = delta.float()if delta_bias is not None:delta = delta + delta_bias[..., None].float()if delta_softplus:delta = F.softplus(delta)batch, dim, dstate = u.shape[0], A.shape[0], A.shape[1]is_variable_B = B.dim() >= 3is_variable_C = C.dim() >= 3if A.is_complex():if is_variable_B:B = torch.view_as_complex(rearrange(B.float(), "... (L two) -> ... L two", two=2))if is_variable_C:C = torch.view_as_complex(rearrange(C.float(), "... (L two) -> ... L two", two=2))else:B = B.float()C = C.float()x = A.new_zeros((batch, dim, dstate))ys = []deltaA = torch.exp(torch.einsum('bdl,dn->bdln', delta, A))if not is_variable_B:deltaB_u = torch.einsum('bdl,dn,bdl->bdln', delta, B, u)else:if B.dim() == 3:deltaB_u = torch.einsum('bdl,bnl,bdl->bdln', delta, B, u)else:B = repeat(B, "B G N L -> B (G H) N L", H=dim // B.shape[1])deltaB_u = torch.einsum('bdl,bdnl,bdl->bdln', delta, B, u)if is_variable_C and C.dim() == 4:C = repeat(C, "B G N L -> B (G H) N L", H=dim // C.shape[1])last_state = Nonefor i in range(u.shape[2]):x = deltaA[:, :, i] * x + deltaB_u[:, :, i]if not is_variable_C:y = torch.einsum('bdn,dn->bd', x, C)else:if C.dim() == 3:y = torch.einsum('bdn,bn->bd', x, C[:, :, i])else:y = torch.einsum('bdn,bdn->bd', x, C[:, :, :, i])if i == u.shape[2] - 1:last_state = xif y.is_complex():y = y.real * 2ys.append(y)y = torch.stack(ys, dim=2) # (batch dim L)out = y if D is None else y + u * rearrange(D, "d -> d 1")if z is not None:out = out * F.silu(z)out = out.to(dtype=dtype_in)return out if not return_last_state else (out, last_state)class MambaInnerFnNoOutProj(torch.autograd.Function):@staticmethod@custom_fwddef forward(ctx, xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,A, B=None, C=None, D=None, delta_bias=None, B_proj_bias=None,C_proj_bias=None, delta_softplus=True, checkpoint_lvl=1):"""xz: (batch, dim, seqlen)"""assert checkpoint_lvl in [0, 1]L = xz.shape[-1]delta_rank = delta_proj_weight.shape[1]d_state = A.shape[-1] * (1 if not A.is_complex() else 2)if torch.is_autocast_enabled():x_proj_weight = x_proj_weight.to(dtype=torch.get_autocast_gpu_dtype())delta_proj_weight = delta_proj_weight.to(dtype=torch.get_autocast_gpu_dtype())if xz.stride(-1) != 1:xz = xz.contiguous()conv1d_weight = rearrange(conv1d_weight, "d 1 w -> d w")x, z = xz.chunk(2, dim=1)conv1d_bias = conv1d_bias.contiguous() if conv1d_bias is not None else Noneconv1d_out = causal_conv1d_cuda.causal_conv1d_fwd(x, conv1d_weight, conv1d_bias, True)# We're being very careful here about the layout, to avoid extra transposes.# We want delta to have d as the slowest moving dimension# and L as the fastest moving dimension, since those are what the ssm_scan kernel expects.x_dbl = F.linear(rearrange(conv1d_out, 'b d l -> (b l) d'), x_proj_weight) # (bl d)delta = rearrange(delta_proj_weight @ x_dbl[:, :delta_rank].t(), "d (b l) -> b d l", l=L)ctx.is_variable_B = B is Nonectx.is_variable_C = C is Nonectx.B_proj_bias_is_None = B_proj_bias is Nonectx.C_proj_bias_is_None = C_proj_bias is Noneif B is None: # variable BB = x_dbl[:, delta_rank:delta_rank + d_state] # (bl dstate)if B_proj_bias is not None:B = B + B_proj_bias.to(dtype=B.dtype)if not A.is_complex():# B = rearrange(B, "(b l) dstate -> b dstate l", l=L).contiguous()B = rearrange(B, "(b l) dstate -> b 1 dstate l", l=L).contiguous()else:B = rearrange(B, "(b l) (dstate two) -> b 1 dstate (l two)", l=L, two=2).contiguous()else:if B.stride(-1) != 1:B = B.contiguous()if C is None: # variable CC = x_dbl[:, -d_state:] # (bl dstate)if C_proj_bias is not None:C = C + C_proj_bias.to(dtype=C.dtype)if not A.is_complex():# C = rearrange(C, "(b l) dstate -> b dstate l", l=L).contiguous()C = rearrange(C, "(b l) dstate -> b 1 dstate l", l=L).contiguous()else:C = rearrange(C, "(b l) (dstate two) -> b 1 dstate (l two)", l=L, two=2).contiguous()else:if C.stride(-1) != 1:C = C.contiguous()if D is not None:D = D.contiguous()out, scan_intermediates, out_z = selective_scan_cuda.fwd(conv1d_out, delta, A, B, C, D, z, delta_bias, delta_softplus)ctx.delta_softplus = delta_softplusctx.checkpoint_lvl = checkpoint_lvlif checkpoint_lvl >= 1: # Will recompute conv1d_out and delta in the backward passconv1d_out, delta = None, Nonectx.save_for_backward(xz, conv1d_weight, conv1d_bias, x_dbl, x_proj_weight,delta_proj_weight, conv1d_out, delta,A, B, C, D, delta_bias, scan_intermediates, out)# return rearrange(out_z, "b d l -> b l d")return out_z@staticmethod@custom_bwddef backward(ctx, dout):# dout: (batch, seqlen, dim)(xz, conv1d_weight, conv1d_bias, x_dbl, x_proj_weight, delta_proj_weight,conv1d_out, delta, A, B, C, D, delta_bias, scan_intermediates, out) = ctx.saved_tensorsL = xz.shape[-1]delta_rank = delta_proj_weight.shape[1]d_state = A.shape[-1] * (1 if not A.is_complex() else 2)x, z = xz.chunk(2, dim=1)if dout.stride(-1) != 1:dout = dout.contiguous()if ctx.checkpoint_lvl == 1:conv1d_out = causal_conv1d_cuda.causal_conv1d_fwd(x, conv1d_weight, conv1d_bias, True)delta = rearrange(delta_proj_weight @ x_dbl[:, :delta_rank].t(),"d (b l) -> b d l", l=L)# The kernel supports passing in a pre-allocated dz (e.g., in case we want to fuse the# backward of selective_scan_cuda with the backward of chunk).dxz = torch.empty_like(xz) # (batch, dim, seqlen)dx, dz = dxz.chunk(2, dim=1)# dout_y = rearrange(dout, "b l d -> b d l") # because no arrange at end of forward, so dout shape is b d ldconv1d_out, ddelta, dA, dB, dC, dD, ddelta_bias, dz, out_z = selective_scan_cuda.bwd(conv1d_out, delta, A, B, C, D, z, delta_bias, dout, scan_intermediates, out, dz,ctx.delta_softplus,True # option to recompute out_z)dD = dD if D is not None else Nonedx_dbl = torch.empty_like(x_dbl)dB_proj_bias = Noneif ctx.is_variable_B:if not A.is_complex():dB = rearrange(dB, "b 1 dstate l -> (b l) dstate").contiguous()else:dB = rearrange(dB, "b 1 dstate (l two) -> (b l) (dstate two)", two=2).contiguous()dB_proj_bias = dB.sum(0) if not ctx.B_proj_bias_is_None else Nonedx_dbl[:, delta_rank:delta_rank + d_state] = dB # (bl d)dB = NonedC_proj_bias = Noneif ctx.is_variable_C:if not A.is_complex():dC = rearrange(dC, "b 1 dstate l -> (b l) dstate").contiguous()else:dC = rearrange(dC, "b 1 dstate (l two) -> (b l) (dstate two)", two=2).contiguous()dC_proj_bias = dC.sum(0) if not ctx.C_proj_bias_is_None else Nonedx_dbl[:, -d_state:] = dC # (bl d)dC = Noneddelta = rearrange(ddelta, "b d l -> d (b l)")ddelta_proj_weight = torch.einsum("dB,Br->dr", ddelta, x_dbl[:, :delta_rank])dx_dbl[:, :delta_rank] = torch.einsum("dB,dr->Br", ddelta, delta_proj_weight)dconv1d_out = rearrange(dconv1d_out, "b d l -> d (b l)")dx_proj_weight = torch.einsum("Br,Bd->rd", dx_dbl, rearrange(conv1d_out, "b d l -> (b l) d"))dconv1d_out = torch.addmm(dconv1d_out, x_proj_weight.t(), dx_dbl.t(), out=dconv1d_out)dconv1d_out = rearrange(dconv1d_out, "d (b l) -> b d l", b=x.shape[0], l=x.shape[-1])# The kernel supports passing in a pre-allocated dx (e.g., in case we want to fuse the# backward of conv1d with the backward of chunk).dx, dconv1d_weight, dconv1d_bias = causal_conv1d_cuda.causal_conv1d_bwd(x, conv1d_weight, conv1d_bias, dconv1d_out, dx, True)dconv1d_bias = dconv1d_bias if conv1d_bias is not None else Nonedconv1d_weight = rearrange(dconv1d_weight, "d w -> d 1 w")return (dxz, dconv1d_weight, dconv1d_bias, dx_proj_weight, ddelta_proj_weight,dA, dB, dC, dD,ddelta_bias if delta_bias is not None else None,dB_proj_bias, dC_proj_bias, None)class MambaInnerFn(torch.autograd.Function):@staticmethod@custom_fwddef forward(ctx, xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,out_proj_weight, out_proj_bias,A, B=None, C=None, D=None, delta_bias=None, B_proj_bias=None,C_proj_bias=None, delta_softplus=True, checkpoint_lvl=1):"""xz: (batch, dim, seqlen)"""assert checkpoint_lvl in [0, 1]L = xz.shape[-1]delta_rank = delta_proj_weight.shape[1]d_state = A.shape[-1] * (1 if not A.is_complex() else 2)if torch.is_autocast_enabled():x_proj_weight = x_proj_weight.to(dtype=torch.get_autocast_gpu_dtype())delta_proj_weight = delta_proj_weight.to(dtype=torch.get_autocast_gpu_dtype())out_proj_weight = out_proj_weight.to(dtype=torch.get_autocast_gpu_dtype())out_proj_bias = (out_proj_bias.to(dtype=torch.get_autocast_gpu_dtype())if out_proj_bias is not None else None)if xz.stride(-1) != 1:xz = xz.contiguous()conv1d_weight = rearrange(conv1d_weight, "d 1 w -> d w")x, z = xz.chunk(2, dim=1)conv1d_bias = conv1d_bias.contiguous() if conv1d_bias is not None else Noneconv1d_out = causal_conv1d_cuda.causal_conv1d_fwd(x, conv1d_weight, conv1d_bias, True)# We're being very careful here about the layout, to avoid extra transposes.# We want delta to have d as the slowest moving dimension# and L as the fastest moving dimension, since those are what the ssm_scan kernel expects.x_dbl = F.linear(rearrange(conv1d_out, 'b d l -> (b l) d'), x_proj_weight) # (bl d)delta = rearrange(delta_proj_weight @ x_dbl[:, :delta_rank].t(), "d (b l) -> b d l", l=L)ctx.is_variable_B = B is Nonectx.is_variable_C = C is Nonectx.B_proj_bias_is_None = B_proj_bias is Nonectx.C_proj_bias_is_None = C_proj_bias is Noneif B is None: # variable BB = x_dbl[:, delta_rank:delta_rank + d_state] # (bl dstate)if B_proj_bias is not None:B = B + B_proj_bias.to(dtype=B.dtype)if not A.is_complex():# B = rearrange(B, "(b l) dstate -> b dstate l", l=L).contiguous()B = rearrange(B, "(b l) dstate -> b 1 dstate l", l=L).contiguous()else:B = rearrange(B, "(b l) (dstate two) -> b 1 dstate (l two)", l=L, two=2).contiguous()else:if B.stride(-1) != 1:B = B.contiguous()if C is None: # variable CC = x_dbl[:, -d_state:] # (bl dstate)if C_proj_bias is not None:C = C + C_proj_bias.to(dtype=C.dtype)if not A.is_complex():# C = rearrange(C, "(b l) dstate -> b dstate l", l=L).contiguous()C = rearrange(C, "(b l) dstate -> b 1 dstate l", l=L).contiguous()else:C = rearrange(C, "(b l) (dstate two) -> b 1 dstate (l two)", l=L, two=2).contiguous()else:if C.stride(-1) != 1:C = C.contiguous()if D is not None:D = D.contiguous()out, scan_intermediates, out_z = selective_scan_cuda.fwd(conv1d_out, delta, A, B, C, D, z, delta_bias, delta_softplus)ctx.delta_softplus = delta_softplusctx.out_proj_bias_is_None = out_proj_bias is Nonectx.checkpoint_lvl = checkpoint_lvlif checkpoint_lvl >= 1: # Will recompute conv1d_out and delta in the backward passconv1d_out, delta = None, Nonectx.save_for_backward(xz, conv1d_weight, conv1d_bias, x_dbl, x_proj_weight,delta_proj_weight, out_proj_weight, conv1d_out, delta,A, B, C, D, delta_bias, scan_intermediates, out)return F.linear(rearrange(out_z, "b d l -> b l d"), out_proj_weight, out_proj_bias)@staticmethod@custom_bwddef backward(ctx, dout):# dout: (batch, seqlen, dim)(xz, conv1d_weight, conv1d_bias, x_dbl, x_proj_weight, delta_proj_weight, out_proj_weight,conv1d_out, delta, A, B, C, D, delta_bias, scan_intermediates, out) = ctx.saved_tensorsL = xz.shape[-1]delta_rank = delta_proj_weight.shape[1]d_state = A.shape[-1] * (1 if not A.is_complex() else 2)x, z = xz.chunk(2, dim=1)if dout.stride(-1) != 1:dout = dout.contiguous()if ctx.checkpoint_lvl == 1:conv1d_out = causal_conv1d_cuda.causal_conv1d_fwd(x, conv1d_weight, conv1d_bias, True)delta = rearrange(delta_proj_weight @ x_dbl[:, :delta_rank].t(),"d (b l) -> b d l", l=L)# The kernel supports passing in a pre-allocated dz (e.g., in case we want to fuse the# backward of selective_scan_cuda with the backward of chunk).dxz = torch.empty_like(xz) # (batch, dim, seqlen)dx, dz = dxz.chunk(2, dim=1)dout = rearrange(dout, "b l e -> e (b l)")dout_y = rearrange(out_proj_weight.t() @ dout, "d (b l) -> b d l", l=L)dconv1d_out, ddelta, dA, dB, dC, dD, ddelta_bias, dz, out_z = selective_scan_cuda.bwd(conv1d_out, delta, A, B, C, D, z, delta_bias, dout_y, scan_intermediates, out, dz,ctx.delta_softplus,True # option to recompute out_z)dout_proj_weight = torch.einsum("eB,dB->ed", dout, rearrange(out_z, "b d l -> d (b l)"))dout_proj_bias = dout.sum(dim=(0, 1)) if not ctx.out_proj_bias_is_None else NonedD = dD if D is not None else Nonedx_dbl = torch.empty_like(x_dbl)dB_proj_bias = Noneif ctx.is_variable_B:if not A.is_complex():dB = rearrange(dB, "b 1 dstate l -> (b l) dstate").contiguous()else:dB = rearrange(dB, "b 1 dstate (l two) -> (b l) (dstate two)", two=2).contiguous()dB_proj_bias = dB.sum(0) if not ctx.B_proj_bias_is_None else Nonedx_dbl[:, delta_rank:delta_rank + d_state] = dB # (bl d)dB = NonedC_proj_bias = Noneif ctx.is_variable_C:if not A.is_complex():dC = rearrange(dC, "b 1 dstate l -> (b l) dstate").contiguous()else:dC = rearrange(dC, "b 1 dstate (l two) -> (b l) (dstate two)", two=2).contiguous()dC_proj_bias = dC.sum(0) if not ctx.C_proj_bias_is_None else Nonedx_dbl[:, -d_state:] = dC # (bl d)dC = Noneddelta = rearrange(ddelta, "b d l -> d (b l)")ddelta_proj_weight = torch.einsum("dB,Br->dr", ddelta, x_dbl[:, :delta_rank])dx_dbl[:, :delta_rank] = torch.einsum("dB,dr->Br", ddelta, delta_proj_weight)dconv1d_out = rearrange(dconv1d_out, "b d l -> d (b l)")dx_proj_weight = torch.einsum("Br,Bd->rd", dx_dbl, rearrange(conv1d_out, "b d l -> (b l) d"))dconv1d_out = torch.addmm(dconv1d_out, x_proj_weight.t(), dx_dbl.t(), out=dconv1d_out)dconv1d_out = rearrange(dconv1d_out, "d (b l) -> b d l", b=x.shape[0], l=x.shape[-1])# The kernel supports passing in a pre-allocated dx (e.g., in case we want to fuse the# backward of conv1d with the backward of chunk).dx, dconv1d_weight, dconv1d_bias = causal_conv1d_cuda.causal_conv1d_bwd(x, conv1d_weight, conv1d_bias, dconv1d_out, dx, True)dconv1d_bias = dconv1d_bias if conv1d_bias is not None else Nonedconv1d_weight = rearrange(dconv1d_weight, "d w -> d 1 w")return (dxz, dconv1d_weight, dconv1d_bias, dx_proj_weight, ddelta_proj_weight,dout_proj_weight, dout_proj_bias,dA, dB, dC, dD,ddelta_bias if delta_bias is not None else None,dB_proj_bias, dC_proj_bias, None)class BiMambaInnerFn(torch.autograd.Function):@staticmethod@custom_fwddef forward(ctx, xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,out_proj_weight, out_proj_bias,A, A_b, B=None, C=None, D=None, delta_bias=None, B_proj_bias=None,C_proj_bias=None, delta_softplus=True, checkpoint_lvl=1):"""xz: (batch, dim, seqlen)"""assert checkpoint_lvl in [0, 1]L = xz.shape[-1]delta_rank = delta_proj_weight.shape[1]d_state = A.shape[-1] * (1 if not A.is_complex() else 2)if torch.is_autocast_enabled():x_proj_weight = x_proj_weight.to(dtype=torch.get_autocast_gpu_dtype())delta_proj_weight = delta_proj_weight.to(dtype=torch.get_autocast_gpu_dtype())out_proj_weight = out_proj_weight.to(dtype=torch.get_autocast_gpu_dtype())out_proj_bias = (out_proj_bias.to(dtype=torch.get_autocast_gpu_dtype())if out_proj_bias is not None else None)if xz.stride(-1) != 1:xz = xz.contiguous()conv1d_weight = rearrange(conv1d_weight, "d 1 w -> d w")x, z = xz.chunk(2, dim=1)conv1d_bias = conv1d_bias.contiguous() if conv1d_bias is not None else Noneconv1d_out = causal_conv1d_cuda.causal_conv1d_fwd(x, conv1d_weight, conv1d_bias, True)# We're being very careful here about the layout, to avoid extra transposes.# We want delta to have d as the slowest moving dimension# and L as the fastest moving dimension, since those are what the ssm_scan kernel expects.x_dbl = F.linear(rearrange(conv1d_out, 'b d l -> (b l) d'), x_proj_weight) # (bl d)delta = rearrange(delta_proj_weight @ x_dbl[:, :delta_rank].t(), "d (b l) -> b d l", l=L)ctx.is_variable_B = B is Nonectx.is_variable_C = C is Nonectx.B_proj_bias_is_None = B_proj_bias is Nonectx.C_proj_bias_is_None = C_proj_bias is Noneif B is None: # variable BB = x_dbl[:, delta_rank:delta_rank + d_state] # (bl dstate)if B_proj_bias is not None:B = B + B_proj_bias.to(dtype=B.dtype)if not A.is_complex():# B = rearrange(B, "(b l) dstate -> b dstate l", l=L).contiguous()B = rearrange(B, "(b l) dstate -> b 1 dstate l", l=L).contiguous()else:B = rearrange(B, "(b l) (dstate two) -> b 1 dstate (l two)", l=L, two=2).contiguous()else:if B.stride(-1) != 1:B = B.contiguous()if C is None: # variable CC = x_dbl[:, -d_state:] # (bl dstate)if C_proj_bias is not None:C = C + C_proj_bias.to(dtype=C.dtype)if not A.is_complex():# C = rearrange(C, "(b l) dstate -> b dstate l", l=L).contiguous()C = rearrange(C, "(b l) dstate -> b 1 dstate l", l=L).contiguous()else:C = rearrange(C, "(b l) (dstate two) -> b 1 dstate (l two)", l=L, two=2).contiguous()else:if C.stride(-1) != 1:C = C.contiguous()if D is not None:D = D.contiguous()out_f, scan_intermediates_f, out_z_f = selective_scan_cuda.fwd(conv1d_out, delta, A, B, C, D, z, delta_bias, delta_softplus)assert not A_b.is_complex(), "A should not be complex!!"out_b, scan_intermediates_b, out_z_b = selective_scan_cuda.fwd(conv1d_out.flip([-1]), delta.flip([-1]), A_b, B.flip([-1]), C.flip([-1]), D, z.flip([-1]), delta_bias,delta_softplus,)out_z = out_z_f + out_z_b.flip([-1])ctx.delta_softplus = delta_softplusctx.out_proj_bias_is_None = out_proj_bias is Nonectx.checkpoint_lvl = checkpoint_lvlif checkpoint_lvl >= 1: # Will recompute conv1d_out and delta in the backward passconv1d_out, delta = None, Nonectx.save_for_backward(xz, conv1d_weight, conv1d_bias, x_dbl, x_proj_weight,delta_proj_weight, out_proj_weight, conv1d_out, delta,A, A_b, B, C, D, delta_bias, scan_intermediates_f, scan_intermediates_b, out_f, out_b)return F.linear(rearrange(out_z, "b d l -> b l d"), out_proj_weight, out_proj_bias)@staticmethod@custom_bwddef backward(ctx, dout):# dout: (batch, seqlen, dim)(xz, conv1d_weight, conv1d_bias, x_dbl, x_proj_weight, delta_proj_weight, out_proj_weight,conv1d_out, delta, A, A_b, B, C, D, delta_bias, scan_intermediates_f, scan_intermediates_b, out_f,out_b) = ctx.saved_tensorsL = xz.shape[-1]delta_rank = delta_proj_weight.shape[1]d_state = A.shape[-1] * (1 if not A.is_complex() else 2)x, z = xz.chunk(2, dim=1)if dout.stride(-1) != 1:dout = dout.contiguous()if ctx.checkpoint_lvl == 1:conv1d_out = causal_conv1d_cuda.causal_conv1d_fwd(x, conv1d_weight, conv1d_bias, True)delta = rearrange(delta_proj_weight @ x_dbl[:, :delta_rank].t(),"d (b l) -> b d l", l=L)# The kernel supports passing in a pre-allocated dz (e.g., in case we want to fuse the# backward of selective_scan_cuda with the backward of chunk).dxz = torch.empty_like(xz) # (batch, dim, seqlen)dx, dz = dxz.chunk(2, dim=1)dout = rearrange(dout, "b l e -> e (b l)")dout_y = rearrange(out_proj_weight.t() @ dout, "d (b l) -> b d l", l=L)dconv1d_out, ddelta, dA, dB, dC, dD, ddelta_bias, dz, out_z_f = selective_scan_cuda.bwd(conv1d_out, delta, A, B, C, D, z, delta_bias, dout_y, scan_intermediates_f, out_f, dz,ctx.delta_softplus,True # option to recompute out_z)# flip onedz_b = torch.empty_like(dz)dconv1d_out_f_b, ddelta_f_b, dA_b, dB_f_b, dC_f_b, dD_b, ddelta_bias_b, dz_b, out_z_b = selective_scan_cuda.bwd(conv1d_out.flip([-1]), delta.flip([-1]), A_b, B.flip([-1]), C.flip([-1]), D, z.flip([-1]), delta_bias,dout_y.flip([-1]), scan_intermediates_b, out_b, dz_b,ctx.delta_softplus,True # option to recompute out_z)dconv1d_out = dconv1d_out + dconv1d_out_f_b.flip([-1])ddelta = ddelta + ddelta_f_b.flip([-1])dB = dB + dB_f_b.flip([-1])dC = dC + dC_f_b.flip([-1])dD = dD + dD_bddelta_bias = ddelta_bias + ddelta_bias_bdz = dz + dz_b.flip([-1])out_z = out_z_f + out_z_b.flip([-1])dout_proj_weight = torch.einsum("eB,dB->ed", dout, rearrange(out_z, "b d l -> d (b l)"))dout_proj_bias = dout.sum(dim=(0, 1)) if not ctx.out_proj_bias_is_None else NonedD = dD if D is not None else Nonedx_dbl = torch.empty_like(x_dbl)dB_proj_bias = Noneif ctx.is_variable_B:if not A.is_complex():dB = rearrange(dB, "b 1 dstate l -> (b l) dstate").contiguous()else:dB = rearrange(dB, "b 1 dstate (l two) -> (b l) (dstate two)", two=2).contiguous()dB_proj_bias = dB.sum(0) if not ctx.B_proj_bias_is_None else Nonedx_dbl[:, delta_rank:delta_rank + d_state] = dB # (bl d)dB = NonedC_proj_bias = Noneif ctx.is_variable_C:if not A.is_complex():dC = rearrange(dC, "b 1 dstate l -> (b l) dstate").contiguous()else:dC = rearrange(dC, "b 1 dstate (l two) -> (b l) (dstate two)", two=2).contiguous()dC_proj_bias = dC.sum(0) if not ctx.C_proj_bias_is_None else Nonedx_dbl[:, -d_state:] = dC # (bl d)dC = Noneddelta = rearrange(ddelta, "b d l -> d (b l)")ddelta_proj_weight = torch.einsum("dB,Br->dr", ddelta, x_dbl[:, :delta_rank])dx_dbl[:, :delta_rank] = torch.einsum("dB,dr->Br", ddelta, delta_proj_weight)dconv1d_out = rearrange(dconv1d_out, "b d l -> d (b l)")dx_proj_weight = torch.einsum("Br,Bd->rd", dx_dbl, rearrange(conv1d_out, "b d l -> (b l) d"))dconv1d_out = torch.addmm(dconv1d_out, x_proj_weight.t(), dx_dbl.t(), out=dconv1d_out)dconv1d_out = rearrange(dconv1d_out, "d (b l) -> b d l", b=x.shape[0], l=x.shape[-1])# The kernel supports passing in a pre-allocated dx (e.g., in case we want to fuse the# backward of conv1d with the backward of chunk).dx, dconv1d_weight, dconv1d_bias = causal_conv1d_cuda.causal_conv1d_bwd(x, conv1d_weight, conv1d_bias, dconv1d_out, dx, True)dconv1d_bias = dconv1d_bias if conv1d_bias is not None else Nonedconv1d_weight = rearrange(dconv1d_weight, "d w -> d 1 w")return (dxz, dconv1d_weight, dconv1d_bias, dx_proj_weight, ddelta_proj_weight,dout_proj_weight, dout_proj_bias,dA, dA_b, dB, dC, dD,ddelta_bias if delta_bias is not None else None,dB_proj_bias, dC_proj_bias, None)def mamba_inner_fn(xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,out_proj_weight, out_proj_bias,A, B=None, C=None, D=None, delta_bias=None, B_proj_bias=None,C_proj_bias=None, delta_softplus=True
):return MambaInnerFn.apply(xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,out_proj_weight, out_proj_bias,A, B, C, D, delta_bias, B_proj_bias, C_proj_bias, delta_softplus)def bimamba_inner_fn(xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,out_proj_weight, out_proj_bias,A, A_b, B=None, C=None, D=None, delta_bias=None, B_proj_bias=None,C_proj_bias=None, delta_softplus=True
):return BiMambaInnerFn.apply(xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,out_proj_weight, out_proj_bias,A, A_b, B, C, D, delta_bias, B_proj_bias, C_proj_bias, delta_softplus)def mamba_inner_fn_no_out_proj(xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,A, B=None, C=None, D=None, delta_bias=None, B_proj_bias=None,C_proj_bias=None, delta_softplus=True
):return MambaInnerFnNoOutProj.apply(xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,A, B, C, D, delta_bias, B_proj_bias, C_proj_bias, delta_softplus)def mamba_inner_ref(xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,out_proj_weight, out_proj_bias,A, B=None, C=None, D=None, delta_bias=None, B_proj_bias=None,C_proj_bias=None, delta_softplus=True
):L = xz.shape[-1]delta_rank = delta_proj_weight.shape[1]d_state = A.shape[-1] * (1 if not A.is_complex() else 2)x, z = xz.chunk(2, dim=1)x = causal_conv1d_fn(x, rearrange(conv1d_weight, "d 1 w -> d w"), conv1d_bias, "silu")# We're being very careful here about the layout, to avoid extra transposes.# We want delta to have d as the slowest moving dimension# and L as the fastest moving dimension, since those are what the ssm_scan kernel expects.x_dbl = F.linear(rearrange(x, 'b d l -> (b l) d'), x_proj_weight) # (bl d)delta = delta_proj_weight @ x_dbl[:, :delta_rank].t()delta = rearrange(delta, "d (b l) -> b d l", l=L)if B is None: # variable BB = x_dbl[:, delta_rank:delta_rank + d_state] # (bl d)if B_proj_bias is not None:B = B + B_proj_bias.to(dtype=B.dtype)if not A.is_complex():B = rearrange(B, "(b l) dstate -> b dstate l", l=L).contiguous()else:B = rearrange(B, "(b l) (dstate two) -> b dstate (l two)", l=L, two=2).contiguous()if C is None: # variable BC = x_dbl[:, -d_state:] # (bl d)if C_proj_bias is not None:C = C + C_proj_bias.to(dtype=C.dtype)if not A.is_complex():C = rearrange(C, "(b l) dstate -> b dstate l", l=L).contiguous()else:C = rearrange(C, "(b l) (dstate two) -> b dstate (l two)", l=L, two=2).contiguous()y = selective_scan_fn(x, delta, A, B, C, D, z=z, delta_bias=delta_bias, delta_softplus=True)return F.linear(rearrange(y, "b d l -> b l d"), out_proj_weight, out_proj_bias)def bimamba_inner_ref(xz, conv1d_weight, conv1d_bias, x_proj_weight, delta_proj_weight,out_proj_weight, out_proj_bias,A, A_b, B=None, C=None, D=None, delta_bias=None, B_proj_bias=None,C_proj_bias=None, delta_softplus=True
):L = xz.shape[-1]delta_rank = delta_proj_weight.shape[1]d_state = A.shape[-1] * (1 if not A.is_complex() else 2)x, z = xz.chunk(2, dim=1)x = causal_conv1d_fn(x, rearrange(conv1d_weight, "d 1 w -> d w"), conv1d_bias, "silu")# We're being very careful here about the layout, to avoid extra transposes.# We want delta to have d as the slowest moving dimension# and L as the fastest moving dimension, since those are what the ssm_scan kernel expects.x_dbl = F.linear(rearrange(x, 'b d l -> (b l) d'), x_proj_weight) # (bl d)delta = delta_proj_weight @ x_dbl[:, :delta_rank].t()delta = rearrange(delta, "d (b l) -> b d l", l=L)if B is None: # variable BB = x_dbl[:, delta_rank:delta_rank + d_state] # (bl d)if B_proj_bias is not None:B = B + B_proj_bias.to(dtype=B.dtype)if not A.is_complex():B = rearrange(B, "(b l) dstate -> b dstate l", l=L).contiguous()else:B = rearrange(B, "(b l) (dstate two) -> b dstate (l two)", l=L, two=2).contiguous()if C is None: # variable BC = x_dbl[:, -d_state:] # (bl d)if C_proj_bias is not None:C = C + C_proj_bias.to(dtype=C.dtype)if not A.is_complex():C = rearrange(C, "(b l) dstate -> b dstate l", l=L).contiguous()else:C = rearrange(C, "(b l) (dstate two) -> b dstate (l two)", l=L, two=2).contiguous()y = selective_scan_fn(x, delta, A, B, C, D, z=z, delta_bias=delta_bias, delta_softplus=True)y_b = selective_scan_fn(x.flip([-1]), delta.flip([-1]), A_b, B.flip([-1]), C.flip([-1]), D, z.flip([-1]),delta_bias, delta_softplus=True)y = y + y_b.flip([-1])return F.linear(rearrange(y, "b d l -> b l d"), out_proj_weight, out_proj_bias)#------------------------------------------class Mamba(nn.Module):def __init__(self,d_model,d_state=16,d_conv=4,expand=2,dt_rank="auto",dt_min=0.001,dt_max=0.1,dt_init="random",dt_scale=1.0,dt_init_floor=1e-4,conv_bias=True,bias=False,use_fast_path=True, # Fused kernel optionslayer_idx=None,device=None,dtype=None,bimamba_type="none"):factory_kwargs = {"device": device, "dtype": dtype}super().__init__()self.d_model = d_modelself.d_state = d_stateself.d_conv = d_convself.expand = expandself.d_inner = int(self.expand * self.d_model)self.dt_rank = math.ceil(self.d_model / 16) if dt_rank == "auto" else dt_rankself.use_fast_path = use_fast_pathself.layer_idx = layer_idxself.bimamba_type = bimamba_typeself.in_proj = nn.Linear(self.d_model, self.d_inner * 2, bias=bias, **factory_kwargs)self.conv1d = nn.Conv1d(in_channels=self.d_inner,out_channels=self.d_inner,bias=conv_bias,kernel_size=d_conv,groups=self.d_inner,padding=d_conv - 1,**factory_kwargs,)self.activation = "silu"self.act = nn.SiLU()self.x_proj = nn.Linear(self.d_inner, self.dt_rank + self.d_state * 2, bias=False, **factory_kwargs)self.dt_proj = nn.Linear(self.dt_rank, self.d_inner, bias=True, **factory_kwargs)# Initialize special dt projection to preserve variance at initializationdt_init_std = self.dt_rank**-0.5 * dt_scaleif dt_init == "constant":nn.init.constant_(self.dt_proj.weight, dt_init_std)elif dt_init == "random":nn.init.uniform_(self.dt_proj.weight, -dt_init_std, dt_init_std)else:raise NotImplementedError# Initialize dt bias so that F.softplus(dt_bias) is between dt_min and dt_maxdt = torch.exp(torch.rand(self.d_inner, **factory_kwargs) * (math.log(dt_max) - math.log(dt_min))+ math.log(dt_min)).clamp(min=dt_init_floor)# Inverse of softplus: https://github.com/pytorch/pytorch/issues/72759inv_dt = dt + torch.log(-torch.expm1(-dt))with torch.no_grad():self.dt_proj.bias.copy_(inv_dt)# Our initialization would set all Linear.bias to zero, need to mark this one as _no_reinitself.dt_proj.bias._no_reinit = True# S4D real initializationA = repeat(torch.arange(1, self.d_state + 1, dtype=torch.float32, device=device),"n -> d n",d=self.d_inner,).contiguous()A_log = torch.log(A) # Keep A_log in fp32self.A_log = nn.Parameter(A_log)self.A_log._no_weight_decay = True# D "skip" parameterself.D = nn.Parameter(torch.ones(self.d_inner, device=device)) # Keep in fp32self.D._no_weight_decay = True# bidirectionalassert bimamba_type == "v2"A_b = repeat(torch.arange(1, self.d_state + 1, dtype=torch.float32, device=device),"n -> d n",d=self.d_inner,).contiguous()A_b_log = torch.log(A_b) # Keep A_b_log in fp32self.A_b_log = nn.Parameter(A_b_log)self.A_b_log._no_weight_decay = Trueself.conv1d_b = nn.Conv1d(in_channels=self.d_inner,out_channels=self.d_inner,bias=conv_bias,kernel_size=d_conv,groups=self.d_inner,padding=d_conv - 1,**factory_kwargs,)self.x_proj_b = nn.Linear(self.d_inner, self.dt_rank + self.d_state * 2, bias=False, **factory_kwargs)self.dt_proj_b = nn.Linear(self.dt_rank, self.d_inner, bias=True, **factory_kwargs)self.D_b = nn.Parameter(torch.ones(self.d_inner, device=device)) # Keep in fp32self.D_b._no_weight_decay = Trueself.out_proj = nn.Linear(self.d_inner, self.d_model, bias=bias, **factory_kwargs)def forward(self, hidden_states, inference_params=None):"""hidden_states: (B, L, D)Returns: same shape as hidden_states"""batch, seqlen, dim = hidden_states.shapeconv_state, ssm_state = None, Noneif inference_params is not None:conv_state, ssm_state = self._get_states_from_cache(inference_params, batch)if inference_params.seqlen_offset > 0:# The states are updated inplaceout, _, _ = self.step(hidden_states, conv_state, ssm_state)return out# We do matmul and transpose BLH -> HBL at the same timexz = rearrange(self.in_proj.weight @ rearrange(hidden_states, "b l d -> d (b l)"),"d (b l) -> b d l",l=seqlen,)if self.in_proj.bias is not None:xz = xz + rearrange(self.in_proj.bias.to(dtype=xz.dtype), "d -> d 1")A = -torch.exp(self.A_log.float()) # (d_inner, d_state)# In the backward pass we write dx and dz next to each other to avoid torch.catif self.use_fast_path and inference_params is None: # Doesn't support outputting the statesif self.bimamba_type == "v2":A_b = -torch.exp(self.A_b_log.float())out = mamba_inner_fn_no_out_proj(xz,self.conv1d.weight,self.conv1d.bias,self.x_proj.weight,self.dt_proj.weight,A,None, # input-dependent BNone, # input-dependent Cself.D.float(),delta_bias=self.dt_proj.bias.float(),delta_softplus=True,)out_b = mamba_inner_fn_no_out_proj(xz.flip([-1]),self.conv1d_b.weight,self.conv1d_b.bias,self.x_proj_b.weight,self.dt_proj_b.weight,A_b,None,None,self.D_b.float(),delta_bias=self.dt_proj_b.bias.float(),delta_softplus=True,)# F.linear(rearrange(out_z, "b d l -> b l d"), out_proj_weight, out_proj_bias)out = F.linear(rearrange(out + out_b.flip([-1]), "b d l -> b l d"), self.out_proj.weight, self.out_proj.bias)else:out = mamba_inner_fn(xz,self.conv1d.weight,self.conv1d.bias,self.x_proj.weight,self.dt_proj.weight,self.out_proj.weight,self.out_proj.bias,A,None, # input-dependent BNone, # input-dependent Cself.D.float(),delta_bias=self.dt_proj.bias.float(),delta_softplus=True,)else:x, z = xz.chunk(2, dim=1)# Compute short convolutionif conv_state is not None:conv_state.copy_(x[:, :, -self.d_conv :]) # Update state (B D W)if causal_conv1d_fn is None:x = self.act(self.conv1d(x)[..., :seqlen])else:assert self.activation in ["silu", "swish"]x = causal_conv1d_fn(x,rearrange(self.conv1d.weight, "d 1 w -> d w"),self.conv1d.bias,self.activation,)# We're careful here about the layout, to avoid extra transposes.# We want dt to have d as the slowest moving dimension# and L as the fastest moving dimension, since those are what the ssm_scan kernel expects.x_dbl = self.x_proj(rearrange(x, "b d l -> (b l) d")) # (bl d)dt, B, C = torch.split(x_dbl, [self.dt_rank, self.d_state, self.d_state], dim=-1)dt = self.dt_proj.weight @ dt.t()dt = rearrange(dt, "d (b l) -> b d l", l=seqlen)B = rearrange(B, "(b l) dstate -> b dstate l", l=seqlen).contiguous()C = rearrange(C, "(b l) dstate -> b dstate l", l=seqlen).contiguous()assert self.activation in ["silu", "swish"]y = selective_scan_fn(x,dt,A,B,C,self.D.float(),z=z,delta_bias=self.dt_proj.bias.float(),delta_softplus=True,return_last_state=ssm_state is not None,)if ssm_state is not None:y, last_state = yssm_state.copy_(last_state)y = rearrange(y, "b d l -> b l d")out = self.out_proj(y)return outclass MambaLayer(nn.Module):def __init__(self, dim, d_state=16, d_conv=4, expand=2):super().__init__()self.dim = dimself.norm = nn.LayerNorm(dim)self.mamba = Mamba(d_model=dim, # Model dimension d_modeld_state=d_state, # SSM state expansion factord_conv=d_conv, # Local convolution widthexpand=expand, # Block expansion factorbimamba_type="v2",)def forward(self, x):B, C = x.shape[:2]assert C == self.dimn_tokens = x.shape[2:].numel()img_dims = x.shape[2:]x_flat = x.reshape(B, C, n_tokens).transpose(-1, -2)x_norm = self.norm(x_flat)# x_norm = x_norm.to('cuda')x_mamba = self.mamba(x_norm)out = x_mamba.transpose(-1, -2).reshape(B, C, *img_dims)#out = out.to(x.device)return out3. vision mamba-yolov8 环境检测与安装
1)代码运行环境验证与安装
应代码需要用到cuda的一些库函数,因此需要安装显卡的驱动以及cuda、以及支持gpu的pytorch版本
验证方式:
命令行输入 nvidia-smi ,若有输出表示驱动已经安装
命令行输入 nvcc -V,若有输出,表示cuda已经安装
命令行分别输入
python
import torch
print(torch.cuda.is_available()),若有输出,支持gpu的pytorch已经安装
若以上均正常输出,则进行4,否则需要进行对应的安装
2)代码运行环境安装
可参考以下博客进行安装
- 关于ubuntu 的显卡的驱动以及cuda安装可参考
- 深度学习项目GPU开发环境安装-CSDN博客
- 关于Windows下安装显卡的驱动以及cuda安装可参考Windows下安装CUDA并配置cuDNN教程_windows安装cudnn-CSDN博客g
- 关于支持gpu的pytorch安装,可参考
- Mamba项目实战-Ubuntu-CSDN博客
4. vision mamba-yolov8 代码安装与改进
1) 克隆yolov8源码
命令行运行
# Clone the ultralytics repository
git clone https://github.com/ultralytics/ultralytics或 百度网盘
链接:https://pan.baidu.com/s/1H9VlKlbRxW5W3wrZGYDPQw
提取码:dbfa
2) 安装yolov8
进入pyproject.toml的同级目录命令行
# Navigate to the cloned directory
cd ultralytics-main运行命令安装 yolov8全部所需要的库
# Install the package in editable mode for development
pip install -e .3)安装 causal-conv1d-main 、mamba-ssm-1.0.1
下载causal-conv1d-main,至ultralytics的同级目录下,进入causal-conv1d-main文件夹,进行安装
链接:https://pan.baidu.com/s/1W4mTvjzMJhf-uT_vryT5Kg
提取码:egfj
cd causal-conv1d-main/安装causal-conv1d-main
python setup.py install安装mamba-ssm-1.0.1
pip install mamba-ssm==1.0.14)添加Vmamba模块
在ultralytics/nn目录下新建Addmoudules目录,并在该目录中新建VMamba.py,以及__init__.py文件。

并将“2.Vmamba(vision mamba)模块代码实现”中代码复制到Vmamba.py里面。
__init__.py填入
from .VMamba import *5)更改task.py文件
打开ultralytics/nn/tasks.py
在第七行处,导入模块

from .Addmodules import *
第300行进行替换

替换为
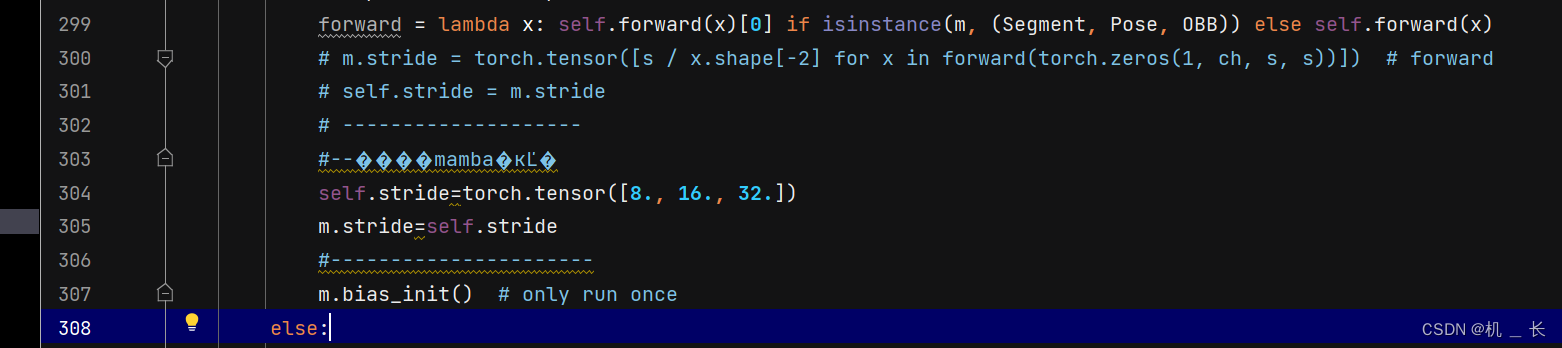
替换代码
# m.stride = torch.tensor([s / x.shape[-2] for x in forward(torch.zeros(1, ch, s, s))]) # forward# self.stride = m.stride# --------------------#--����mamba�ĸĽ�self.stride=torch.tensor([8., 16., 32.])m.stride=self.stride#----------------------895行增加 MambaLayer


6)添加VMamba-yolov8.yaml
在ultralytics/cfg/models/v8,新建VMamba-yolov8.yaml文件
在里面写入
# Ultralytics YOLO ??, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect# Parameters
nc: 2 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'# [depth, width, max_channels]n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPss: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPsd: [0.67, 0.50, 768] #YOLOv8s summary: 295 layers, 11716214 parameters, 11716189 gradients, 36.2 GFLOPsm: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPsl: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPsx: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs# YOLOv8.0n backbone
backbone:# [from, repeats, module, args]- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2 # 0. 320- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4 # 1. 160- [-1, 3, MambaLayer, [128]] # 2. 160- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8 # 3. 80- [-1, 6, MambaLayer, [256]] # 4. 80- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16 # 5. 40- [-1, 6, MambaLayer, [512]] # 6. 40- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32 # 7. 20- [-1, 3, MambaLayer, [1024]] # 8. 20- [-1, 1, SPPF, [1024, 5]] # 9 # 9. 20
# YOLOv8.0n head
head:- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 6], 1, Concat, [1]] # cat backbone P4- [-1, 3, C2f, [512]] # 12- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 4], 1, Concat, [1]] # cat backbone P3- [-1, 3, C2f, [256]] # 15 (P3/8-small)- [-1, 1, Conv, [256, 3, 2]]- [[-1, 12], 1, Concat, [1]] # cat head P4- [-1, 3, C2f, [512]] # 18 (P4/16-medium)- [-1, 1, Conv, [512, 3, 2]]- [[-1, 9], 1, Concat, [1]] # cat head P5- [-1, 3, C2f, [1024]] # 21 (P5/32-large)- [[15, 18, 21], 1, Detect, [nc]] # Detect(P3, P4, P5)
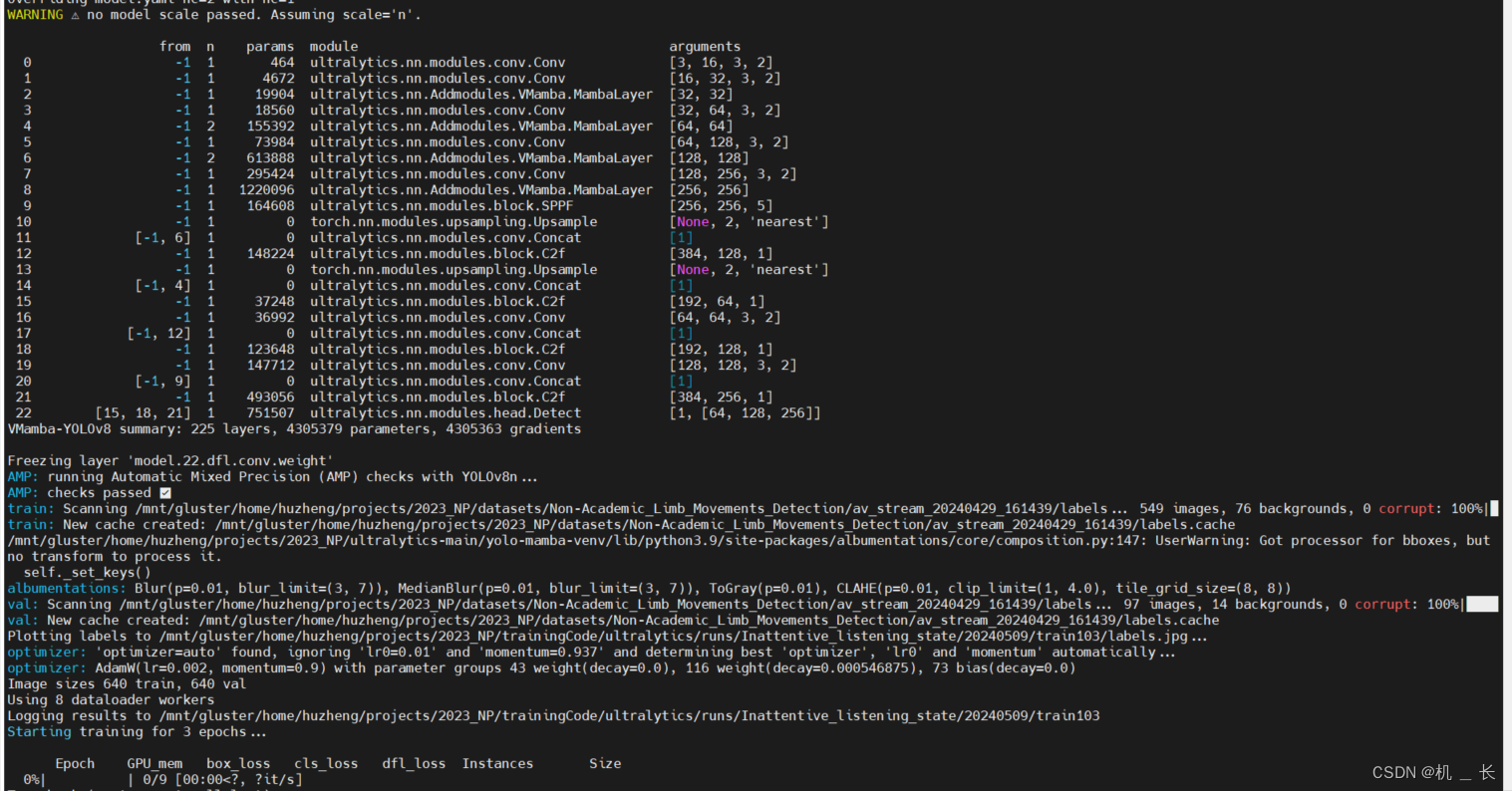
7) 运行训练
在ultralytics-main目录下新建train.py,
在里面写入
from ultralytics import YOLOmodel = YOLO('./ultralytics/cfg/models/v8/VMamba-yolov8.yaml') model.train(data='数据集配置文件路径',device="0",epochs=300,amp=False ,project="训练结果保存路径",batch=70,imgsz=640)5.vision mamba-yolov8 训练展示


![[数据集][目标检测]睡岗检测数据集VOC+YOLO格式3290张4类别](https://img-blog.csdnimg.cn/direct/df5087939f7e44b49256a7569f95370d.png)
![[图解]SysML和EA建模住宅安全系统-05-参数图](https://img-blog.csdnimg.cn/direct/29df5817b9c24512a6975e17a94d4032.png)