Opencv双目校正函数 stereoRectify 详解
参数说明:
输入参数:
cameraMatrix1:左目相机内参矩阵
distCoeffs1:左目相机畸变参数
cameraMatrix2:右目相机内参矩阵
distCoeffs2:右目相机畸变参数
imageSize:图像大小
R:左目相机坐标系到右目相机坐标系的旋转变换,即 R r l R_{rl}R
rl
T:左目相机坐标系到右目相机坐标系的平移变换,即 t r l t_{rl}t
rl
flags:如果设置为 CALIB_ZERO_DISPARITY,函数会将两个相机的 principal point 设成一样。否则就会平移图像最大化有用的图像区域。
alpha:自由缩放参数。如果设置为 -1 或者不设置,函数执行默认缩放。否则参数应为 0-1 。0:矫正图像会放大和平移使得最终图像中只有有效像素;1:图像会缩小和平移使得原始图像中所有像素都可见。
newImageSize:矫正后的图像分辨率。默认(0,0),设置为原始图像大小。设置为高的分辨率可以保持原始图像的更多细节,特别是畸变较大的时候。
validPixROI1:一个最多地包含有效像素的长方形。(左目图像)
validPixROI2:一个最多地包含有效像素的长方形。(右目图像)输出参数:
R1:矫正旋转矩阵。将第一个相机坐标系下未矫正的点变换到第一个相机矫正坐标系下,即 R_{左矫正坐标系}{左未矫正坐标系}
R2:矫正旋转矩阵。将第二个相机坐标系下未矫正的点变换到第二个相机矫正坐标系下,即 R_{右矫正坐标系}{右未矫正坐标系}
P1:3x4左相机投影矩阵。将左矫正坐标系下的点投影到左矫正坐标系图像平面坐标系。
P2:3x4右相机投影矩阵。将左矫正坐标系下的点投影到右矫正坐标系图像平面坐标系。
Q:4x4的视差深度映射矩阵。
。
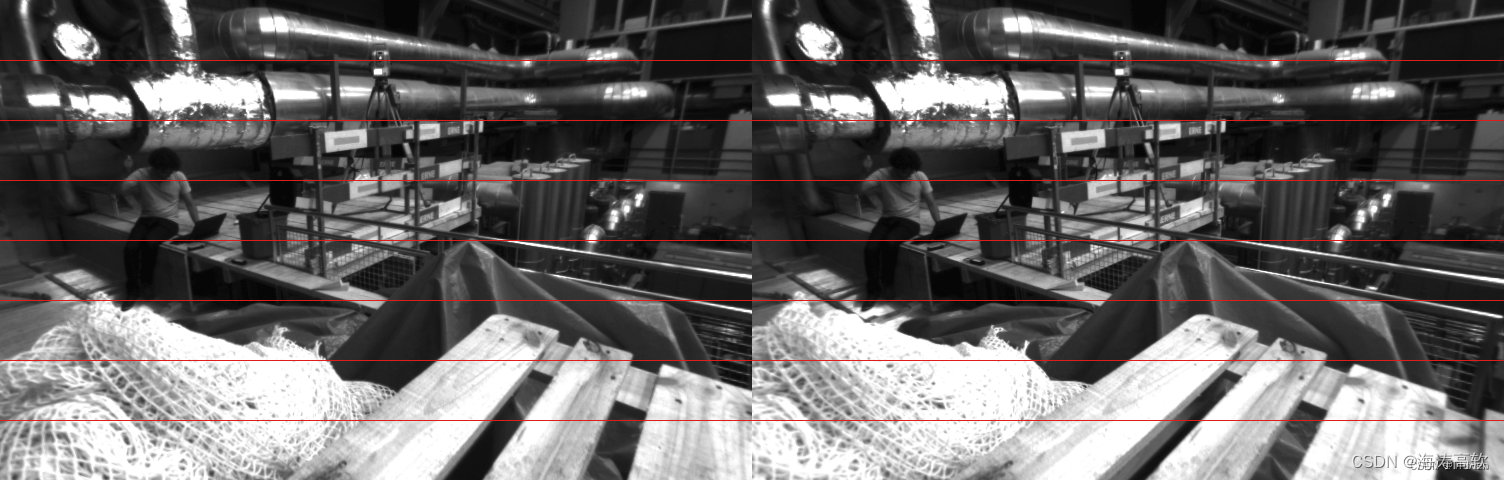
在校正前后双目图像中绘制与 x 轴平行的直线: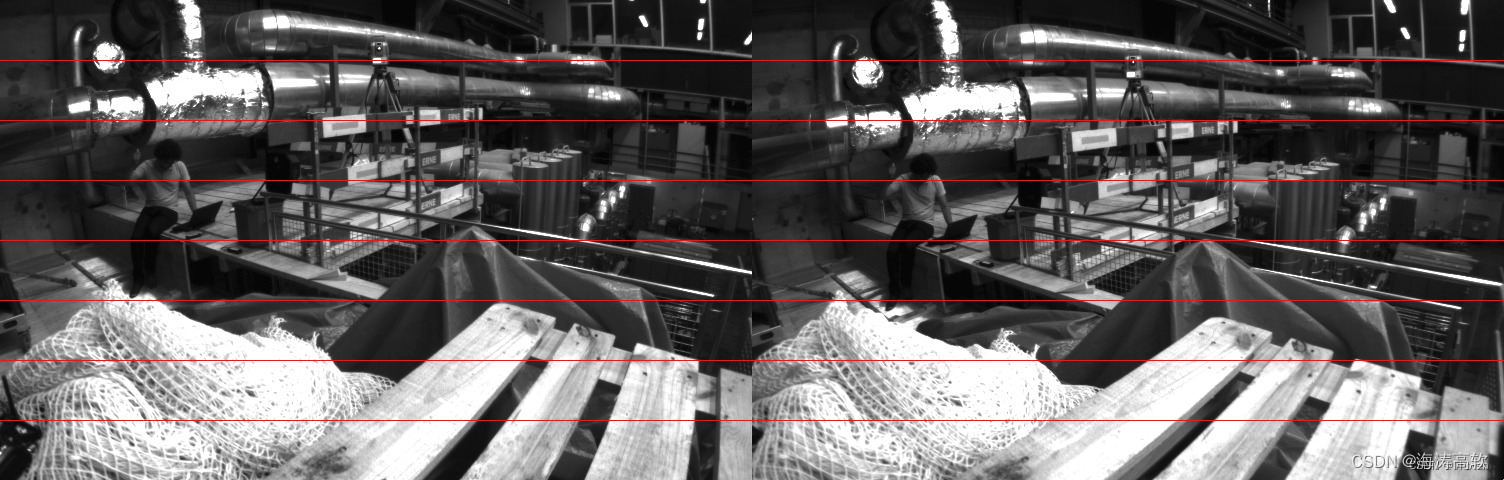
校正后左右目图像同一极线平行且极线上所有点的 y 坐标相等
initUndistortRectifyMap
cameraMatrix——输入的摄像机内参数矩阵
distCoeffs——输入的摄像机畸变系数矩阵
R——输入的第一和第二相机坐标系之间的旋转矩阵
newCameraMatrix——输入的校正后的3X3摄像机矩阵(也可用cvStereoRectify()得出的3X4的左或右投影矩阵,其实系统会自动提取该矩阵前三列的有用部分作为输入参数)
size——摄像机采集的无失真图像尺寸
m1type——map1的数据类型,可以是CV_32FC1或CV_16SC2
map1——输出的X坐标重映射参数
map2——输出的Y坐标重映射参数通过映射的方式逐个找出理想点在有畸变原图的位置。initUndistortRectifyMap()用于产生映射表,remap()用于执行映射。
适用场景:
当要进行多次畸变校正时,使用initUndistortRectifyMap() remap()组合比较有效率,只需要执行一次initUndistortRectifyMap(),后面畸变校正只需要执行remap()即可
cv2.remap
什么是重映射?
重映射(Remapping)是图像处理中的一种操作,用于将图像中的像素从一个位置映射到另一个位置。重映射可以实现图像的平移、旋转、缩放和透视变换等效果。它是一种基于像素级的图像变换技术,可以通过定义映射关系来改变图像的几何形状和外观。
在重映射中,我们需要定义一个映射表(Map),这个映射表指定了源图像中每个像素点在目标图像中的位置。对于每个像素点 (x, y),映射表告诉我们在目标图像中的新位置 (x’, y’)。通过对所有像素点进行映射,我们就可以得到经过重映射变换后的新图像。