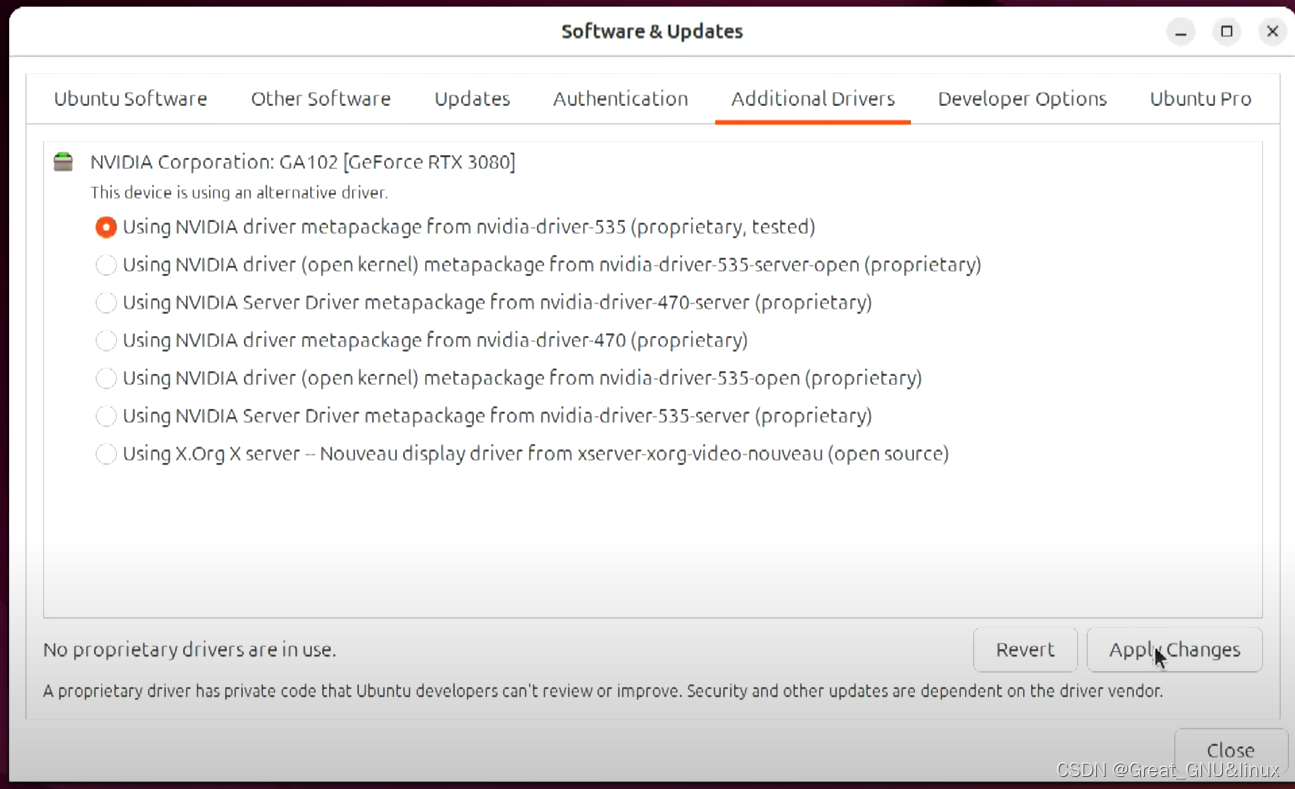
Ubuntu 24.04-自动安装-Nvidia驱动
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/368963.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章


@amap/amap-jsapi-loader实现高德地图嵌入React项目中,并且做到点击地图任意一处,获得它的经纬度
1.第一步要加入项目package.json中或者直接yarn install它都可以 想必大家应该都会 "amap/amap-jsapi-loader": "0.0.7"2.加入项目中 关于接口获取key的接口 大家改成自己对应的项目请求方法
import React, { PureComponent } from react;
import { Input…
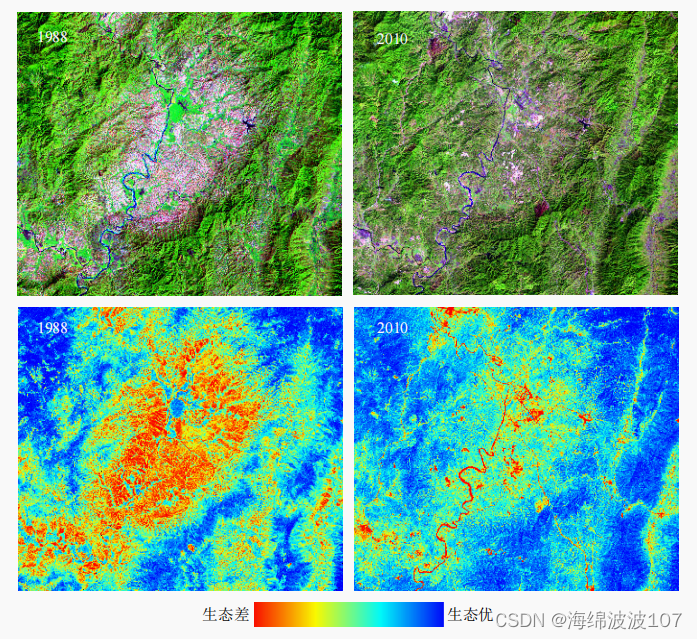
GEE计算遥感生态指数RSEI
目录 RESI湿度绿度热度干度源代码归一化函数代码解释整体的代码功能解释:导出RSEI计算结果参考文献RESI RSEI = f (Greenness,Wetness,Heat,Dryness)其遥感定义为: RSEI = f (VI,Wet,LST,SI)式中:Greenness 为绿度;Wetness 为湿度;Thermal为热度;Dryness 为干度;VI 为植被指数…
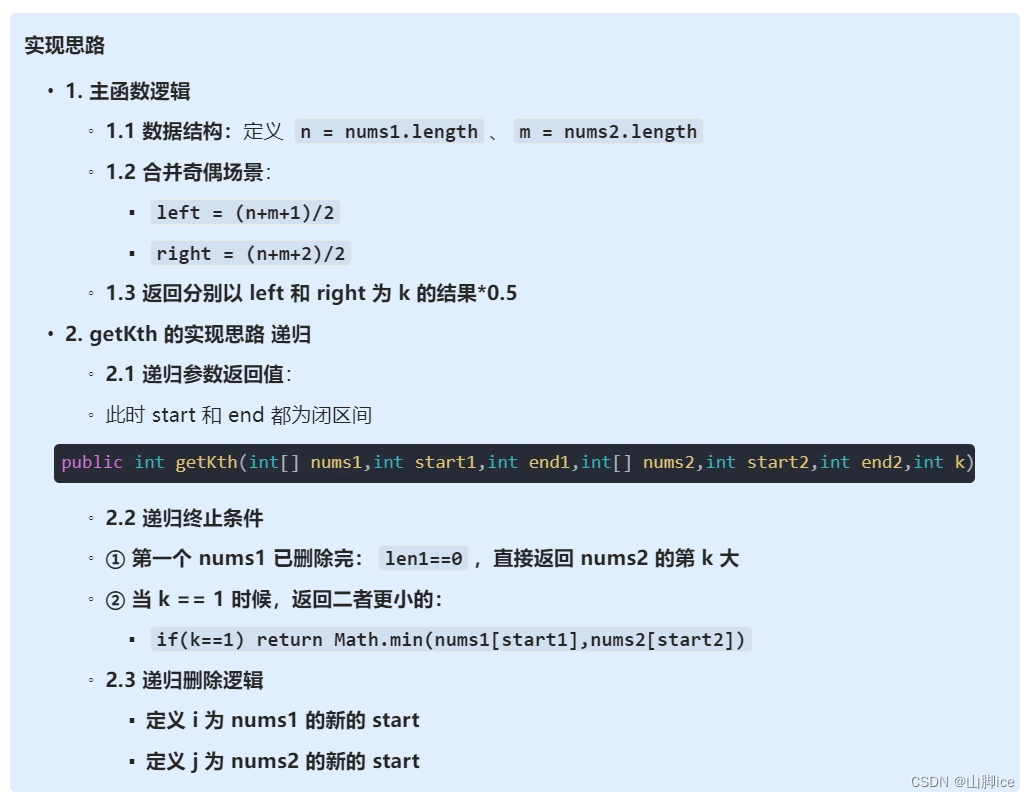
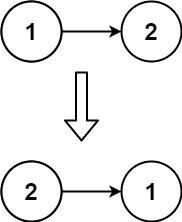
【CT】LeetCode手撕—4. 寻找两个正序数组的中位数
目录 题目1- 思路2- 实现⭐4. 寻找两个正序数组的中位数——题解思路 3- ACM 实现 题目
原题连接:4. 寻找两个正序数组的中位数 1- 思路
思路
将寻找中位数 ——> 寻找两个合并数组的第 K 大 (K代表中位数)
实现
① 遍历两个数组 &am…

如何利用AI撰写短文案获客?分享6大平台和3大步骤!
从去年开始,很多大厂都在裁员,原因就是因为AI的火爆,替代了很多机械式的劳动力。以前很多人可以通过机械式的工作来摸鱼,现在AI完成的效率比人工的要高很多倍。 国内好用的AI平台非常多,有时候也可以使用几个AI平台结合…

如何提高内容生产效率
在当前数字化和信息爆炸的时代,内容生产的需求不断增加,如何提高内容生产效率成为企业面临的重要课题。本文将介绍一种有效的内容生产协同工具——【可瓜】,并详细探讨其在提高内容生产效率方面的优势和实际应用。 内容生产任务进度追踪
传统…
![【BUUCTF-PWN】7-[第五空间2019 决赛]PWN5](https://i-blog.csdnimg.cn/direct/fae5708be3dc49ff9957efef258c59c2.png)
【BUUCTF-PWN】7-[第五空间2019 决赛]PWN5
参考:BUU pwn [第五空间2019 决赛]PWN5 //格式化字符串漏洞 - Nemuzuki - 博客园 (cnblogs.com) 格式化字符串漏洞原理详解_printf 任意内存读取-CSDN博客
32位小端排序,有栈溢出保护
运行效果:
查看main函数
存在格式化字符串漏洞 输…

基于iview.viewUI实现行合并(无限制/有限制合并)【已验证可正常运行】
1.基于iview.viewUI实现行合并(列之间没有所属对应关系,正常合并) 注:以下代码来自于GPT4o:国内直连GPT4o 只需要修改以下要合并的列字段,就可以方便使用啦
mergeFields: [majorNo, devNam, overhaulAdvic…

嵌入式Linux系统编程 — 6.7 实时信号
目录
1 什么是实时信号
2 sigqueue函数
3 sigpending()函数 1 什么是实时信号
等待信号集只是一个掩码,它并不追踪信号的发生次数。这意味着,如果相同的信号在被阻塞的状态下多次产生,它只会在信号集中被记录一次,并且在信号集…
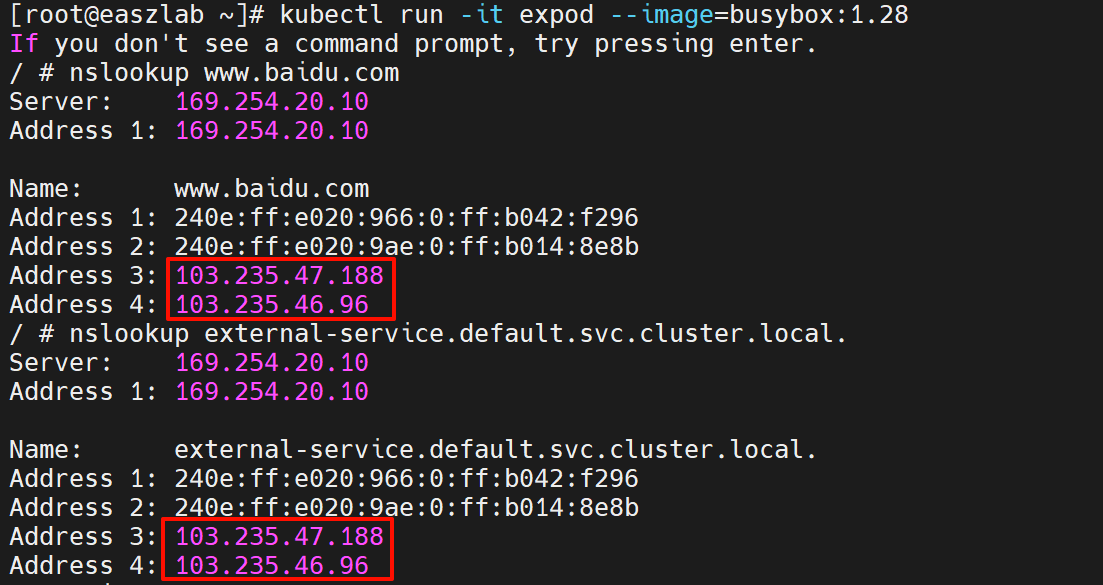
kubernetes service 服务
1 service作用
使用kubernetes集群运行工作负载时,由于Pod经常处于用后即焚状态,Pod经常被重新生成,因此Pod对应的IP地址也会经常变化,导致无法直接访问Pod提供的服务,Kubernetes中使用了Service来解决这一问题&#…
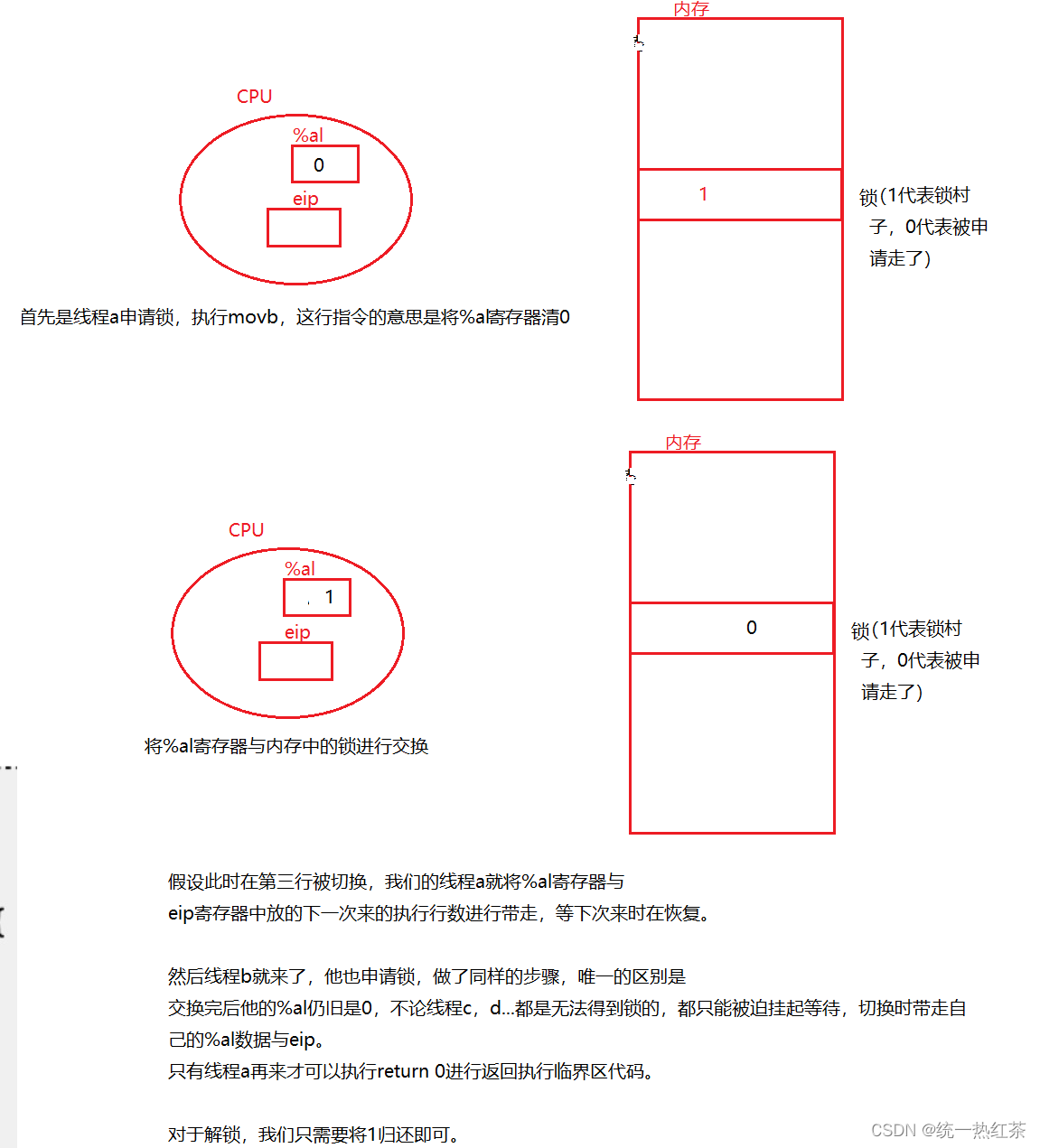
【Linux】多线程(互斥 同步)
我们在上一节多线程提到没有任何保护措施的抢票是会造成数据不一致的问题的。
那我们怎么办? 答案就是进行加锁。 目录 加锁:认识锁和接口:初始化:加锁 && 解锁:全局的方式:局部的方式:…

【SkiaSharp绘图15】SKPath属性详解:边界、填充、凹凸、类型判断、坐标、路径类型
文章目录 SKPath 构造函数SKPath 属性Bounds 边界(宽边界)TightBounds紧边界FillType填充方式IsConcave 是否凹/ IsConvex 是否凸IsEmpty是否为空IsLine是否为线段IsRect是否为矩形IsOval是否为椭圆或圆IsRoundRect是否为圆角矩形Item[] 获取路径的坐标LastPoint最后点的坐标Po…

2024最全软件测试面试八股文(答案+文档+视频讲解)
Part1
1、你的测试职业发展是什么?
测试经验越多,测试能力越高。所以我的职业发展是需要时间积累的,一步步向着高级测试工程师奔去。而且我也有初步的职业规划,前3年积累测试经验,按如何做好测试工程师的要点去要求自…

OrangePi AIpro开发板测评 —— 相机图像获取
💂 个人主页: 同学来啦🤟 版权: 本文由【同学来啦】原创、在CSDN首发、需要转载请联系博主 💬 如果文章对你有帮助,欢迎关注、点赞、收藏和订阅专栏哦 文章目录 🌟 一、引言🌟 二、OrangePi AIpro 简要介绍…

基于Transformer的端到端的目标检测 | 读论文
本文正在参加 人工智能创作者扶持计划 提及到计算机视觉的目标检测,我们一般会最先想到卷积神经网络(CNN),因为这算是目标检测领域的开山之作了,在很长的一段时间里人们都折服于卷积神经网络在图像处理领域的优势&…
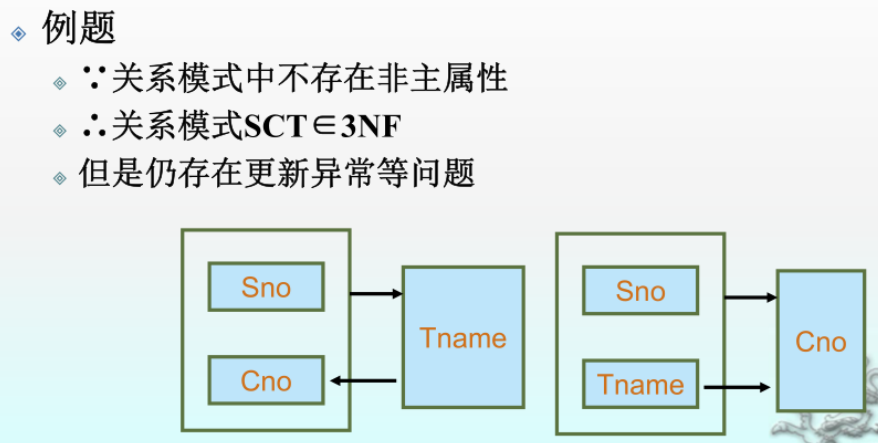
【数据库】E-R图、E-R模型到关系模式的转换、关系代数表达式、范式
一、E-R图 1、基本概念 2、实体集之间的联系 3、E-R图要点
(1)实体(型)的表示 (2)E-R图属性的表示 (3)联系的表示 4、E-R模型的例题 二、E-R模型到关系模式的转换
1、实体型的转换…
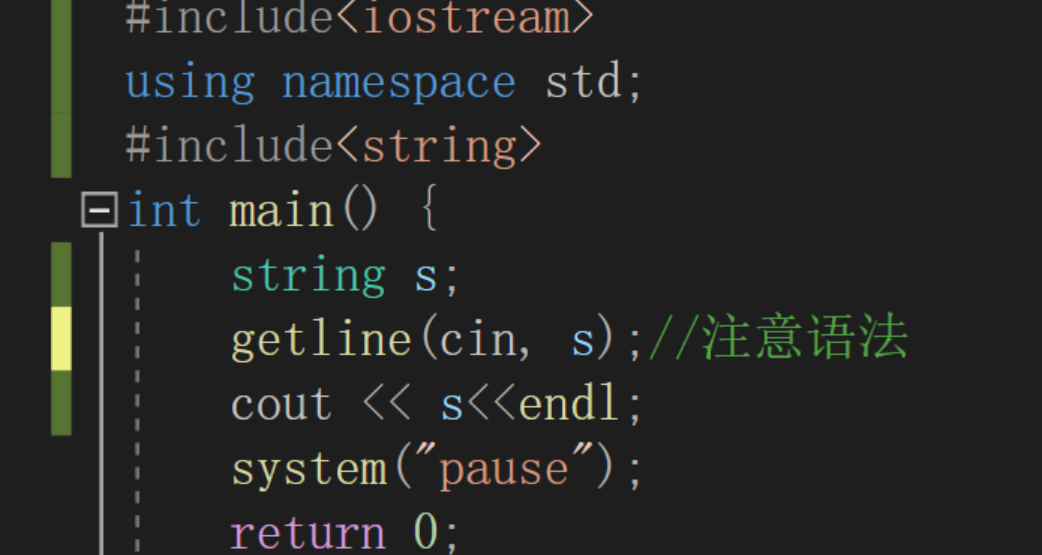
使用getline()从文件中读取一行字符串
我们知道,getline() 方法定义在 istream 类中,而 fstream 和 ifstream 类继承自 istream 类,因此 fstream 和 ifstream 的类对象可以调用 getline() 成员方法。 当文件流对象调用 getline() 方法时,该方法的功能就变成了从指定文件…
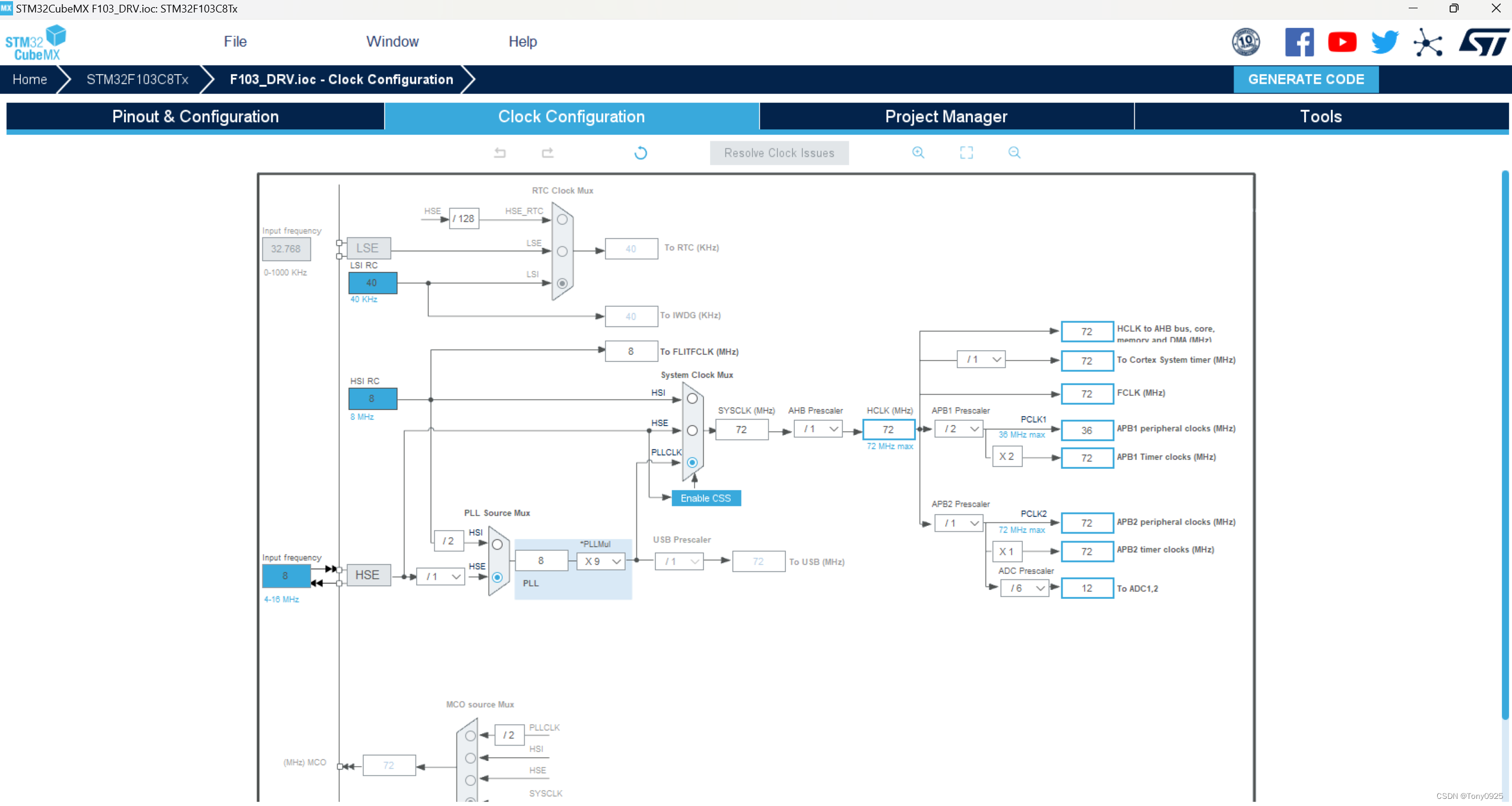
基于STM32F103C8T6的同步电机驱动-CubeMX配置与IQmath调用
基于STM32F103C8T6的同步电机驱动-CubeMX配置与IQmath调用
一、功能描述:
上位机通过CAN总线实现对电机的运动控制,主要包含三种模式:位置模式、速度模式以及力矩模式。驱动器硬件核心为STM32F103C8T6,带相电压采集电路以及母线电压采集电路。其中供电电压12V。 PWM中心对…
最新文章
- 有自己网站好处/西安seo公司
- 国家工程建设标准化协会网站/长春网站建设方案优化
- 电子商城网站制作公司/外国网站的浏览器
- 网络基础知识/吉林网站seo
- 自己做装修效果的网站/山东济南最新事件
- 建站公司要不要承担网站被黑/免费创建个人网站
- Docker 安装 禅道-21.2版本-外部数据库模式
- 【异常】GL-SFT1200路由器中继模式,TL-CPE1300D无法搜寻5G网问题分析
- 【信息系统项目管理师】高分论文:论信息系统项目的进度管理(人力资源管理系统)
- Anaconda3 pypi 清华大学TUNA镜像源使用帮助
- 源码分析之Openlayers中OverviewMap鹰眼控件
- 关于如何做技术文档
推荐文章