1、卷积神经网络的手写数字旋转角度预测原理及流程
基于卷积神经网络的手写数字旋转角度预测是一个常见的计算机视觉问题。在这种情况下,我们可以通过构建一个卷积神经网络(Convolutional Neural Network,CNN)来实现该任务。以下是基于MATLAB的手写数字旋转角度预测的原理和流程:
原理:
-
数据准备:首先,准备一个包含手写数字图像和其对应标签(即旋转角度)的数据集。这些图像可以是MNIST数据集的手写数字。
-
模型建立:构建一个CNN模型,包括卷积层、池化层、全连接层等,来学习手写数字图像的特征并预测它们的旋转角度。
-
训练模型:利用准备好的训练数据集对CNN模型进行训练,通过反向传播算法来调整模型参数以最小化预测与真实标签之间的误差。
-
模型评估:使用测试数据集对训练好的模型进行评估,计算模型的准确率或其他性能指标,以评估其在预测手写数字旋转角度方面的性能。
流程:
-
加载数据集:在MATLAB中加载手写数字图像数据集,并对图像进行预处理和标签处理,以便输入到CNN模型中。
-
构建CNN模型:使用MATLAB深度学习工具箱中的函数(如
convolution2dLayer、maxPooling2dLayer、fullyConnectedLayer、classificationLayer)构建一个适合手写数字旋转角度预测的CNN模型。 -
定义训练选项:设置训练选项,包括优化器类型、学习率、最大训练轮数等。
-
训练模型:使用训练数据集对CNN模型进行训练,通过调用
trainNetwork函数并传入训练数据和训练选项来完成训练过程。 -
评估模型:使用测试数据集对训练好的模型进行评估,计算准确率等性能指标。
-
预测手写数字的旋转角度:最后,使用训练好的模型对新的手写数字图像进行预测,得到其旋转角度的预测结果。
这是基于卷积神经网络的手写数字旋转角度预测的基本原理和流程。
2、卷积神经网络的手写数字旋转角度预测案例说明
1)解决问题
卷积神经网络来预测手写数字的旋转角度
2)技术方案
回归任务涉及预测连续数值而不是离散类标签,回归构造卷积神经网络架构,训练网络,并使用经过训练的网络来预测旋转手写数字的角度。
3、加载数据
1)数据说明
数据集包含手写数字的合成图像以及每个图像的旋转角度(以度为单位)。
2)加载数据代码
说明:变量 anglesTrain 和 anglesTest 是以度为单位的旋转角度。训练数据集和测试数据集各包含 5000 个图像。
load DigitsDataTrain
load DigitsDataTest3)显示训练集代码
numObservations = size(XTrain,4);
idx = randperm(numObservations,49);
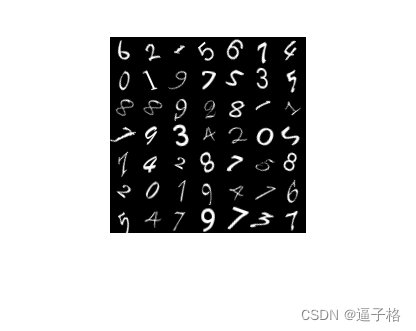
I = imtile(XTrain(:,:,:,idx));
figure
imshow(I);视图效果
4)数据集划分代码
说明:使用 trainingPartitions 函数将 XTrain 和 anglesTrain 分区为训练分区和验证分区,留出 15% 的训练数据用于验证。
[idxTrain,idxValidation] = trainingPartitions(numObservations,[0.85 0.15]);XValidation = XTrain(:,:,:,idxValidation);
anglesValidaiton = anglesTrain(idxValidation);XTrain = XTrain(:,:,:,idxTrain);
anglesTrain = anglesTrain(idxTrain);4、检查数据归一化
1)归一化说明
训练神经网络时,确保数据在网络的所有阶段均归一化。
对于使用梯度下降的网络训练,归一化有助于训练的稳定和加速.
数据比例不佳,则损失可能会变为 NaN,并且网络参数在训练过程中可能发生偏离
归一化数据的常用方法包括重新缩放数据,使其范围变为 [0,1],或使其均值为 0 且标准差为 1
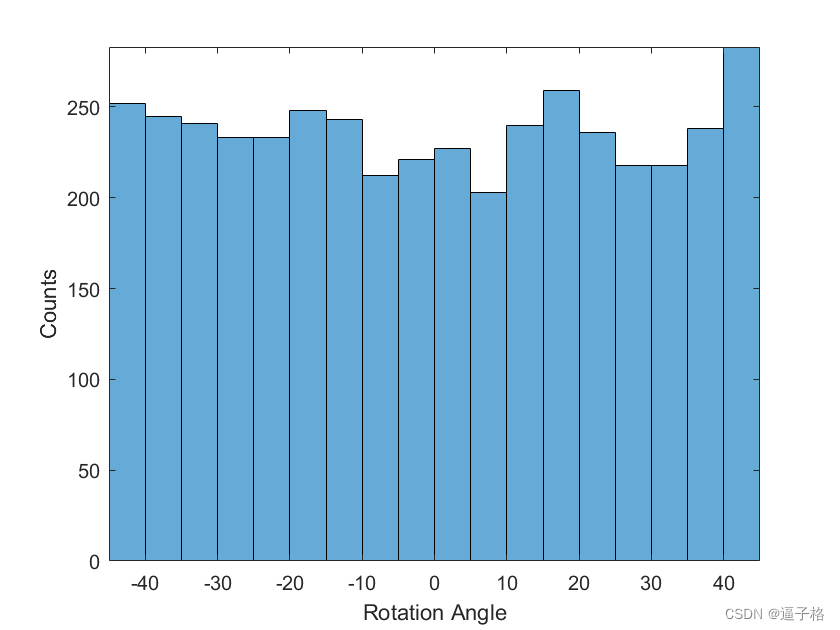
2)绘制响应的分布代码
说明:响应(以度为单位的旋转角度)大致均匀地分布在 -45 和 45 之间,效果很好,无需归一化。
figure
histogram(anglesTrain)
axis tight
ylabel("Counts")
xlabel("Rotation Angle")
视图效果
5、定义神经网络架构
1)神经网络架构说明
对于图像输入,指定一个图像输入层。
指定四个 convolution-batchnorm-ReLU 模块,并增加滤波器数量。
在每个模块之间指定一个具有池化区域的平均池化层,步幅大小为 2。
在网络末尾,包含一个全连接层,其输出大小与响应数量匹配。
2)神经网络架构代码
numResponses = 1;layers = [imageInputLayer([28 28 1])convolution2dLayer(3,8,Padding="same")batchNormalizationLayerreluLayeraveragePooling2dLayer(2,Stride=2)convolution2dLayer(3,16,Padding="same")batchNormalizationLayerreluLayeraveragePooling2dLayer(2,Stride=2)convolution2dLayer(3,32,Padding="same")batchNormalizationLayerreluLayerconvolution2dLayer(3,32,Padding="same")batchNormalizationLayerreluLayerfullyConnectedLayer(numResponses)];6、指定训练选项
1)指定训练选项说明
使用Experiment Manager。
将初始学习率设置为 0.001,并在 20 轮训练后降低学习率。
通过指定验证数据和验证频率,监控训练过程中的网络准确度。软件基于训练数据训练网络,并在训练过程中按固定时间间隔计算基于验证数据的准确度。验证数据不用于更新网络权重。
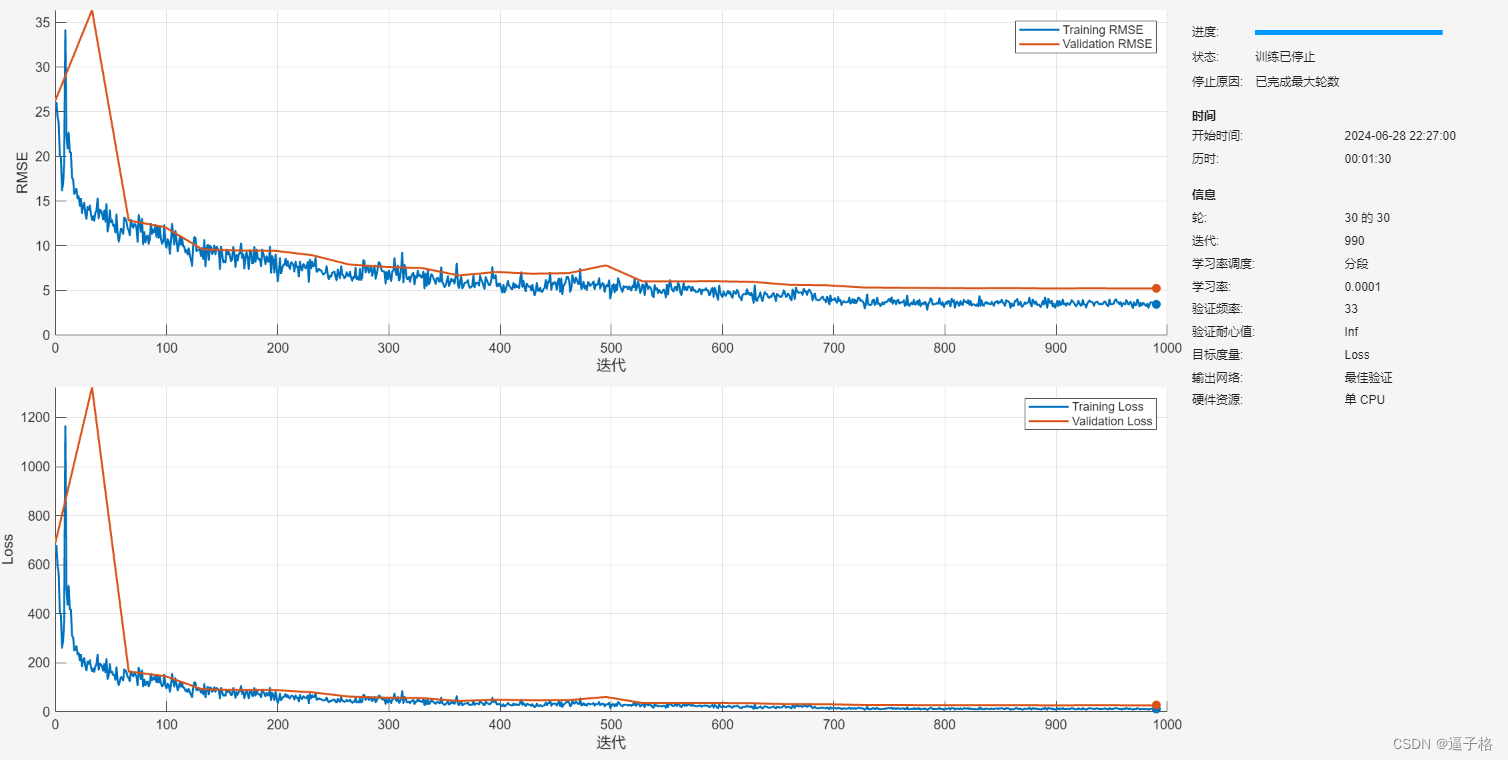
在图中显示训练进度并监控均方根误差。
2)指定训练选项代码
miniBatchSize = 128;
validationFrequency = floor(numel(anglesTrain)/miniBatchSize);options = trainingOptions("sgdm", ...MiniBatchSize=miniBatchSize, ...InitialLearnRate=1e-3, ...LearnRateSchedule="piecewise", ...LearnRateDropFactor=0.1, ...LearnRateDropPeriod=20, ...Shuffle="every-epoch", ...ValidationData={XTest,anglesTest}, ...ValidationFrequency=validationFrequency, ...Plots="training-progress", ...Metrics="rmse", ...Verbose=false);7、训练神经网络
1)训练神经网络说明
使用 trainnet 函数训练神经网络。
对于回归,请使用均方误差损失。默认情况下,trainnet 函数使用 GPU(如果有)。使用 GPU 需要 Parallel Computing Toolbox™ 许可证和受支持的 GPU 设备。要指定执行环境,请使用 ExecutionEnvironment 训练选项。
2)训练神经网络代码
net = trainnet(XTrain,anglesTrain,layers,"mse",options);视图效果
8、测试网络
1)测试网络说明
基于测试数据评估准确度来测试网络性能。
使用 minibatchpredict 函数进行预测。默认情况下,minibatchpredict 函数使用 GPU(如果有)。
2)测试网络代码
YTest = minibatchpredict(net,XTest);3)计算均方根误差 (RMSE) 以衡量预测旋转角度和实际旋转角度之间的差异
predictionError = anglesTest - YTest;
squares = predictionError.^2;
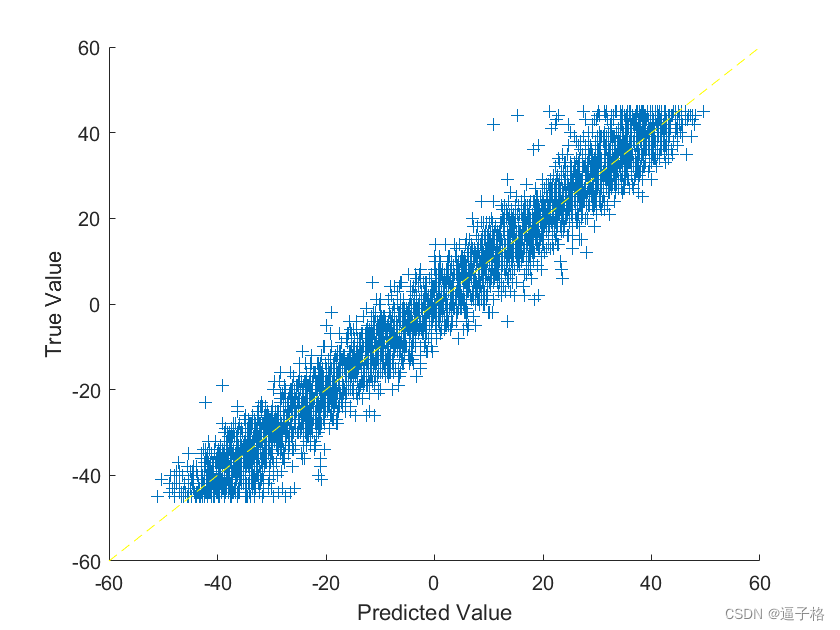
rmse = sqrt(mean(squares))4)散点图中可视化预测。绘制预测值对真实值的图。
figure
scatter(YTest,anglesTest,"+")
xlabel("Predicted Value")
ylabel("True Value")hold on
plot([-60 60], [-60 60],"y--")视图效果
9、使用新数据进行预测
1)测试说明
使用 predict 函数并使用神经网络对第一个测试图像进行预测
2)测试代码
X = XTest(:,:,:,1);
if canUseGPUX = gpuArray(X);
end
Y = predict(net,X)10、总结
基于卷积神经网络的手写数字旋转角度预测是一个常见的计算机视觉问题,通过使用MATLAB深度学习工具箱可以比较方便地实现。下面是对这一任务的总结:
总结要点:
-
数据准备:准备包含手写数字图像和对应旋转角度标签的数据集,如MNIST数据集。
-
模型建立:构建卷积神经网络(CNN)模型,通过卷积层、池化层、全连接层等结构来学习手写数字图像的特征和预测旋转角度。
-
训练模型:使用训练数据集对CNN模型进行训练,通过反向传播算法来调整模型参数,最小化预测与真实标签的误差。
-
模型评估:使用测试数据集对训练好的模型进行评估,计算准确率或其他性能指标,评定模型在预测旋转角度上的性能。
实现流程:
-
数据加载和预处理:加载手写数字图像数据集,对图像进行预处理(如缩放、归一化)并提取对应的旋转角度标签。
-
CNN模型构建:使用MATLAB深度学习工具箱中的函数构建CNN模型,包括卷积层、池化层、全连接层,并适当选择激活函数。
-
训练模型:定义训练选项,选择优化器和学习率等参数,使用训练数据集对CNN模型进行训练。
-
模型评估:使用测试数据集对训练好的模型进行评估,检验其在预测手写数字旋转角度的准确性。
-
预测和应用:最后,使用训练好的模型对新的手写数字图像进行预测,实现手写数字旋转角度的自动识别和预测。
通过以上流程和总结,您可以利用MATLAB深度学习工具箱来实现基于卷积神经网络的手写数字旋转角度预测任务。
11、源代码
代码
%% 基于卷积神经网络的手写数字旋转角度预测
%卷积神经网络来预测手写数字的旋转角度
%回归任务涉及预测连续数值而不是离散类标签
%回归构造卷积神经网络架构,训练网络,并使用经过训练的网络来预测旋转手写数字的角度。%% 加载数据
%数据集包含手写数字的合成图像以及每个图像的旋转角度(以度为单位)。
%变量 anglesTrain 和 anglesTest 是以度为单位的旋转角度。训练数据集和测试数据集各包含 5000 个图像。load DigitsDataTrain
load DigitsDataTest%显示训练集
numObservations = size(XTrain,4);
idx = randperm(numObservations,49);
I = imtile(XTrain(:,:,:,idx));
figure
imshow(I);%数据集划分
%使用 trainingPartitions 函数将 XTrain 和 anglesTrain 分区为训练分区和验证分区,留出 15% 的训练数据用于验证。
[idxTrain,idxValidation] = trainingPartitions(numObservations,[0.85 0.15]);XValidation = XTrain(:,:,:,idxValidation);
anglesValidaiton = anglesTrain(idxValidation);XTrain = XTrain(:,:,:,idxTrain);
anglesTrain = anglesTrain(idxTrain);%% 检查数据归一化
%训练神经网络时,确保数据在网络的所有阶段均归一化。
%对于使用梯度下降的网络训练,归一化有助于训练的稳定和加速.
%数据比例不佳,则损失可能会变为 NaN,并且网络参数在训练过程中可能发生偏离
%归一化数据的常用方法包括重新缩放数据,使其范围变为 [0,1],或使其均值为 0 且标准差为 1%绘制响应的分布。
% 响应(以度为单位的旋转角度)大致均匀地分布在 -45 和 45 之间,效果很好,无需归一化。
figure
histogram(anglesTrain)
axis tight
ylabel("Counts")
xlabel("Rotation Angle")%% 定义神经网络架构
%对于图像输入,指定一个图像输入层。
%指定四个 convolution-batchnorm-ReLU 模块,并增加滤波器数量。
%在每个模块之间指定一个具有池化区域的平均池化层,步幅大小为 2。
%在网络末尾,包含一个全连接层,其输出大小与响应数量匹配。
numResponses = 1;layers = [imageInputLayer([28 28 1])convolution2dLayer(3,8,Padding="same")batchNormalizationLayerreluLayeraveragePooling2dLayer(2,Stride=2)convolution2dLayer(3,16,Padding="same")batchNormalizationLayerreluLayeraveragePooling2dLayer(2,Stride=2)convolution2dLayer(3,32,Padding="same")batchNormalizationLayerreluLayerconvolution2dLayer(3,32,Padding="same")batchNormalizationLayerreluLayerfullyConnectedLayer(numResponses)];
%% 指定训练选项
%使用Experiment Manager。
%将初始学习率设置为 0.001,并在 20 轮训练后降低学习率。
%通过指定验证数据和验证频率,监控训练过程中的网络准确度。软件基于训练数据训练网络,并在训练过程中按固定时间间隔计算基于验证数据的准确度。验证数据不用于更新网络权重。
%在图中显示训练进度并监控均方根误差。miniBatchSize = 128;
validationFrequency = floor(numel(anglesTrain)/miniBatchSize);options = trainingOptions("sgdm", ...MiniBatchSize=miniBatchSize, ...InitialLearnRate=1e-3, ...LearnRateSchedule="piecewise", ...LearnRateDropFactor=0.1, ...LearnRateDropPeriod=20, ...Shuffle="every-epoch", ...ValidationData={XTest,anglesTest}, ...ValidationFrequency=validationFrequency, ...Plots="training-progress", ...Metrics="rmse", ...Verbose=false);
%% 训练神经网络
%使用 trainnet 函数训练神经网络。
%对于回归,请使用均方误差损失。默认情况下,trainnet 函数使用 GPU(如果有)。使用 GPU 需要 Parallel Computing Toolbox™ 许可证和受支持的 GPU 设备。要指定执行环境,请使用 ExecutionEnvironment 训练选项。
net = trainnet(XTrain,anglesTrain,layers,"mse",options);
%% 测试网络
%基于测试数据评估准确度来测试网络性能。
%使用 minibatchpredict 函数进行预测。默认情况下,minibatchpredict 函数使用 GPU(如果有)。
YTest = minibatchpredict(net,XTest);
%计算均方根误差 (RMSE) 以衡量预测旋转角度和实际旋转角度之间的差异。
predictionError = anglesTest - YTest;
squares = predictionError.^2;
rmse = sqrt(mean(squares))
%散点图中可视化预测。绘制预测值对真实值的图。
figure
scatter(YTest,anglesTest,"+")
xlabel("Predicted Value")
ylabel("True Value")hold on
plot([-60 60], [-60 60],"y--")%% 使用新数据进行预测
%使用 predict 函数并使用神经网络对第一个测试图像进行预测
X = XTest(:,:,:,1);
if canUseGPUX = gpuArray(X);
end
Y = predict(net,X)工程文件
https://download.csdn.net/download/XU157303764/89494539