一、机器人是什么?

机器人是如何组成的(控制的角度)


二、机器人系统构建
执行机构的实现——机器人底盘、电机、舵机等
驱动系统的实现

内部传感器的实现


控制系统的实现
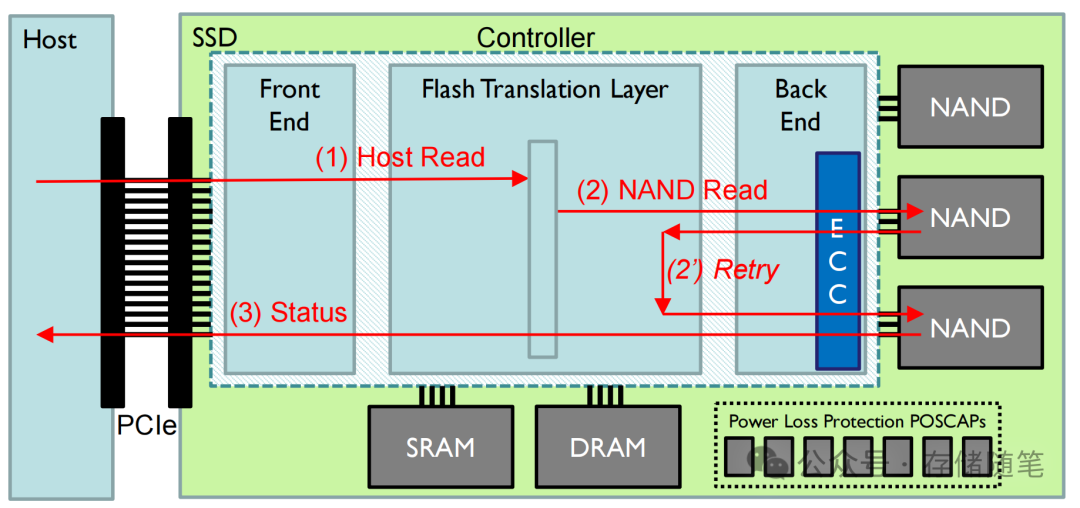
外部传感系统的实现——摄像头、激光雷达、GPS等
1、连接摄像头
sudo apt-get install ros-kinetic-usb-cam
roslaunch usb_cam usb_cam-test.launch
rqt_iamge_view
2、连接Kinect

3、连接激光雷达


将当前的任务名进入串口权限进去,USER_NAME改成自己的用户名

应用实例:


三、URDF机器人建模

xml文件的好处在于可以比较方便使用机器人的标签、属性、相关信息,看上去也比较直观
连杆link 关节joint

 旋转关节使用的较多,重点关注continuous和revolute
旋转关节使用的较多,重点关注continuous和revolute

joint用来连接两个link

此命令在创建的工作空间的src目录下打开终端,xxx_description中放置的是机器人的描述文件(xxx表示的是机器人的名称)创建成功以后会包含CMakeLists文件和package文件,其他文件夹是自行创建


base_link一般代表小车的本体 ,确定圆柱体(cylinder)的高度和宽度,确定颜色(rgba值)
xyz的数值表示偏移效果,例如origin xyz=“1 0 0”表示在x轴方向上偏移1m
rpy表示旋转角度(单位是弧度),例如rpy=“1.57 0 0”表示在x轴方向上旋转90度
使用roslaunch命令看模型效果:
roslaunch mbot_description display_mbot_base_urdf.launch
车轮也属于一个link,link与link之间需要通过joint连接



使用box来描述摄像头的外观模型



在当前路径下使用命令行工具对整体结构进行检查