一、区域未停留AI检测算法概述
随着人工智能和计算机视觉技术的飞速发展,区域未停留AI检测算法作为一种重要的视频分析技术,逐渐在各个领域得到广泛应用。该算法通过高效处理视频流数据,能够实时分析并判断目标对象是否在预设区域内有足够的停留时间,为安全管理和事件预防提供了有力支持。

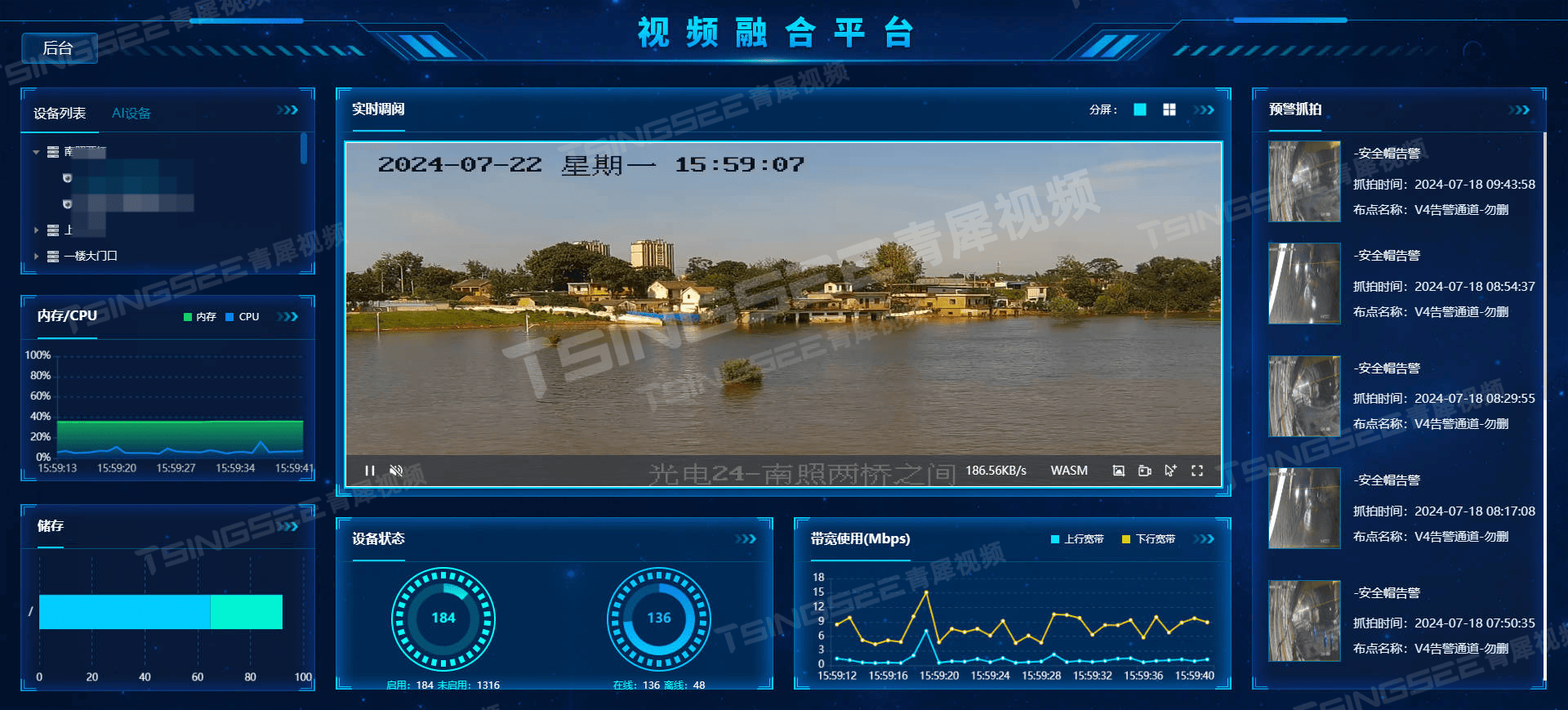
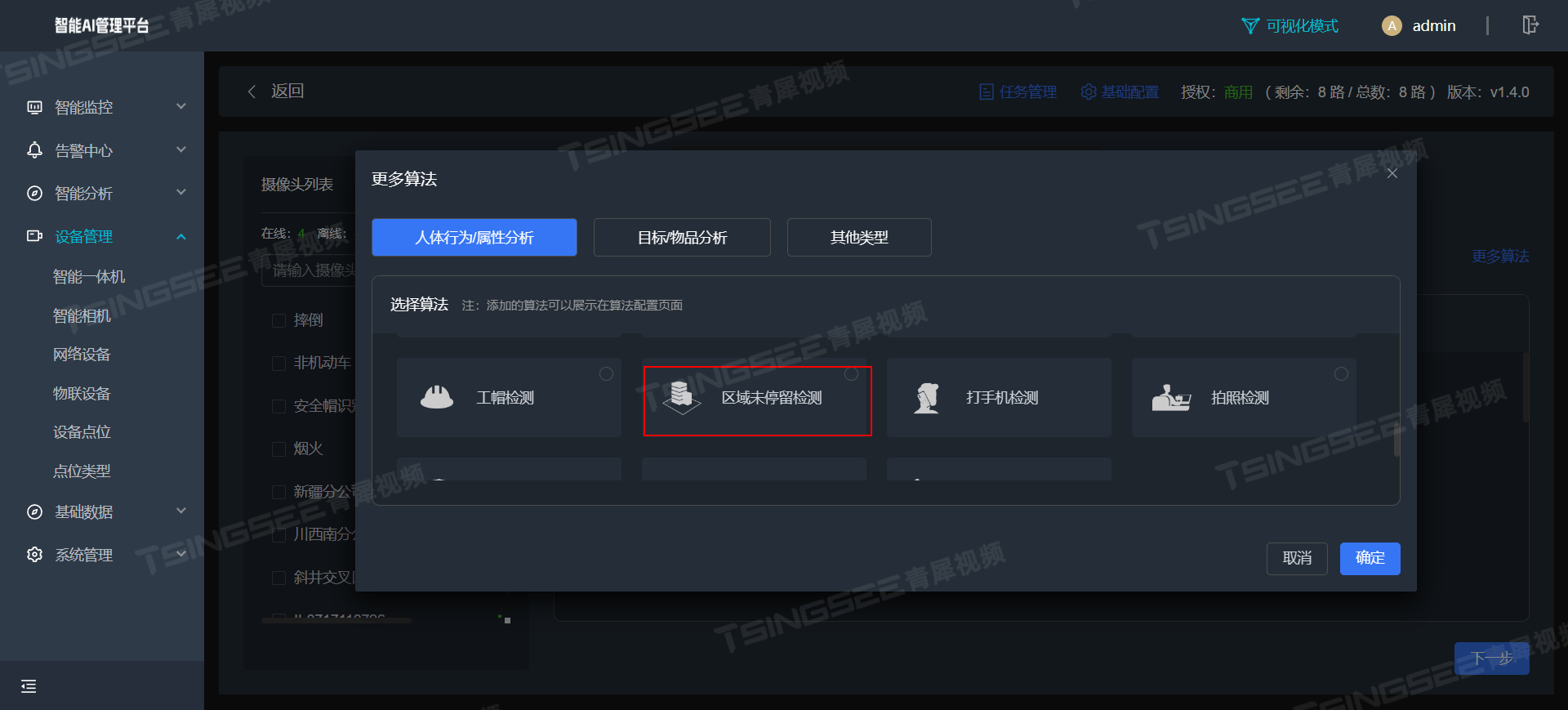
TSINGSEE智能分析网关V4内置了近40种AI算法模型,支持对接入的视频图像进行人、车、物、行为等实时检测分析,上报识别结果,并能进行语音告警播放。算法可按需组合、按场景配置,每个摄像头可同时配置3路算法,支持摄像头轮询与算法轮询任务。智能分析网关V4区域未停留AI检测算法具体是指,有些区域要求人员经过时需停留规定的时间,如果停留未达到规定的时间则触发告警。
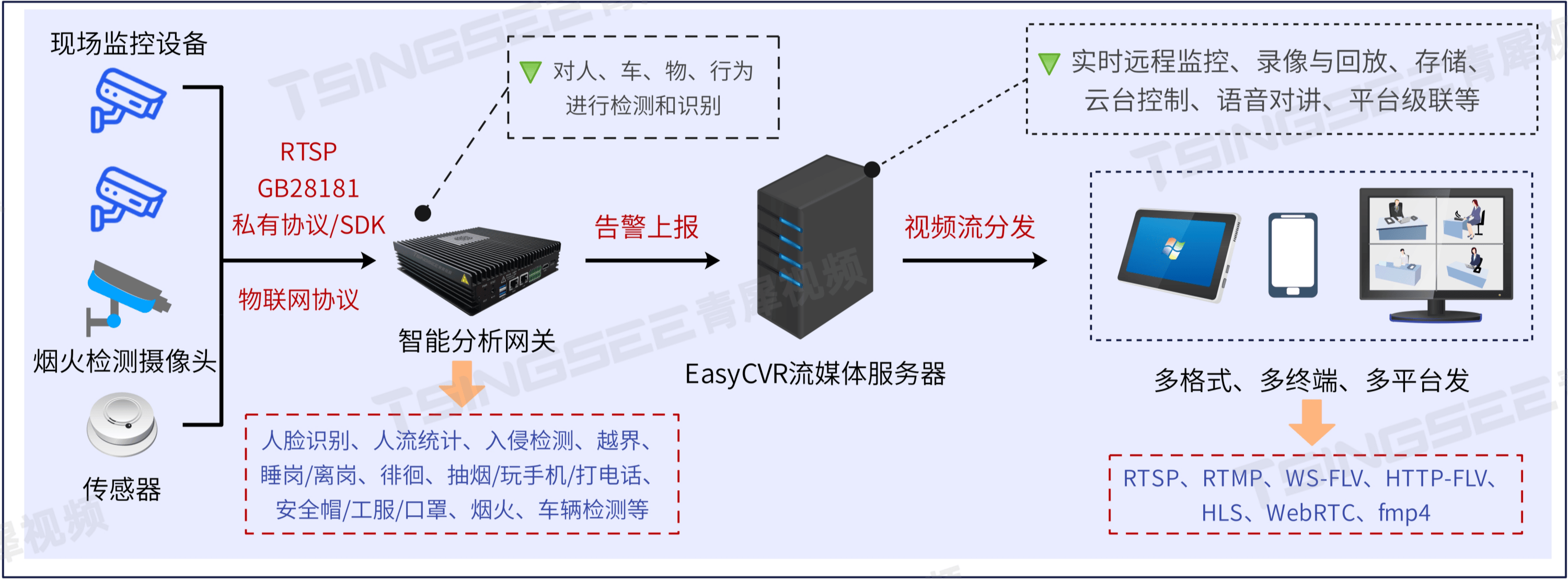
一旦检测到有目标在预设区域内未停留,系统会立即触发告警机制,通过声音、邮件、短信或直接在监控界面上弹出告警信息,通知相关人员。同时,系统还可以抓拍、录像,记录这些未停留事件,为后续的决策分析提供数据支持。
二、算法原理
1、图像采集与预处理
图像采集是算法运行的第一步,通常依赖于高清摄像头或监控摄像头网络,覆盖需要监控的区域。摄像头需具备良好的夜视能力和宽视角,以确保在各种光线条件下都能获取清晰、全面的视频画面。
采集到的原始视频数据首先进行预处理,包括去噪、增强对比度、调整帧率等,以提升后续处理的准确性和效率。此外,还可能进行视频帧的分割,将连续的视频流转换为一系列静态图像,便于后续的目标检测处理。
2、目标检测与跟踪
利用深度学习模型(如YOLO、SSD等)对预处理后的图像进行目标检测,快速识别出图像中的人体、车辆等目标对象,并标注其位置和大小。这些模型经过大量数据训练,具备高准确性和实时性。
在检测到目标后,采用目标跟踪算法(如SORT、DeepSORT等)对目标进行连续跟踪,即使目标在视频中出现遮挡、移动速度变化等情况,也能保持稳定的跟踪效果。这有助于构建目标对象在监控区域内的完整运动轨迹。
3、区域停留分析
此步骤是区域未停留检测的核心。根据预设的区域坐标和大小,算法将目标对象的运动轨迹与这些区域进行比对,计算目标在每个区域内的停留时间。如果停留时间低于预设阈值,则判断为目标未在该区域停留。
三、技术特点
- 智能识别:相比传统的人工巡查和地感线圈等方式,AI算法能够自动识别目标并判断其是否未停留,降低了人工成本和误判率。
- 全天候监测:算法可以实现24小时不间断的监测,无须额外的人力投入,提高了监管的效率和覆盖面。
- 高准确性:通过深度学习算法训练,AI检测算法能够准确识别目标并判断其行为,提高了检测的准确性和可靠性。
- 实时反馈与快速响应:一旦检测到未停留行为,算法能够立即生成告警信息并反馈到管理平台,实现快速响应和干预。
四、典型应用场景
- 铁道作业:在上道作业人员穿越铁道开始工作前,为确认安全需停留并观察是否有车辆经过。若有上道作业人员违规作业(未停留),则触发警报并抓拍和记录违规行为。
随着技术的不断发展和完善,区域未停留AI检测算法将在更多领域发挥重要作用。同时,随着算法模型的不断优化和算力的提升,区域未停留AI检测算法的准确性和实时性将得到进一步提升,为安全管理和事件预防提供更加有力的支持。