目录
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
4.1 MSER
4.2 HOG特征提取
4.3 SVM
5.算法完整程序工程
1.算法运行效果图预览
(完整程序运行后无水印)






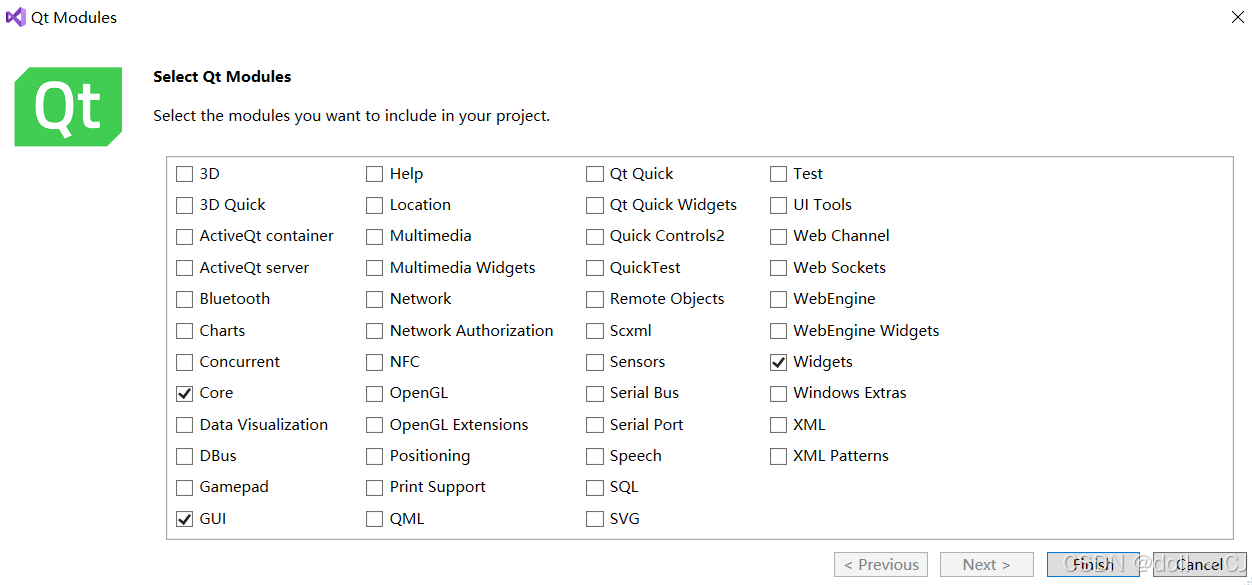
2.算法运行软件版本
matlab2017b
3.部分核心程序
(完整版代码包含中文注释和操作步骤视频)
function [Ic,Xmin3,Xmax3,Ymin3,Ymax3] = func_merge(I,Trafficxy,Smj,SCALE);%提取交通标志的中心点,判断是否为同一个标志
for i = 1:length(Trafficxy)Xmin(i)= min(Trafficxy{i}(:,1));Xmax(i)= max(Trafficxy{i}(:,1));Ymin(i)= min(Trafficxy{i}(:,2));Ymax(i)= max(Trafficxy{i}(:,2));Xc(i) = (Xmin(i)+Xmax(i))/2;Yc(i) = (Ymin(i)+Ymax(i))/2;
end%重合点合并
Xmin2=[];
Xmax2=[];
Ymin2=[];
Ymax2=[];if length(Xc)>1indx = 0;for i = 1:length(Xc)tmps=[];for j = 1:length(Xc)if sqrt(double((Xc(i) - Xc(j))^2 + (Yc(i) - Yc(j))^2))<=20tmps=[tmps,j];endendXmin2(i) = mean(Xmin(tmps));Xmax2(i) = mean(Xmax(tmps));Ymin2(i) = mean(Ymin(tmps));Ymax2(i) = mean(Ymax(tmps)); end%根据XYi的相似性进行合并
elseXmin2= Xmin;Xmax2= Xmax;Ymin2= Ymin;Ymax2= Ymax;
end%%
index = 0;
for i = 1:length(Xmin2)SS = abs(Ymin2(i)-Ymax2(i))*abs(Xmin2(i)-Xmax2(i))if SS>Smjindex = index + 1; Ic{index} = I(Ymin2(i)-SCALE:Ymax2(i)+SCALE,Xmin2(i)-SCALE:Xmax2(i)+SCALE,:);Xmin3(index) = (Xmin(i));Xmax3(index) = (Xmax(i));Ymin3(index) = (Ymin(i));Ymax3(index) = (Ymax(i)); end
end
10_044m4.算法理论概述
4.1 MSER
MSER是一种用于检测显著区域的技术,它能够提取图像中的稳定区域,这些区域在不同尺度上都是稳定的。MSER对于光照变化具有鲁棒性,这使得它非常适合于交通标志检测。MSER算法基于一个关键概念:对于给定的阈值t,图像中的每一个像素点都可以被标记为前景或背景。随着阈值t的变化,图像中的区域也会随之发生变化。MSER区域定义为在一定范围内,即使阈值变化也不会发生分裂或合并的区域。

4.2 HOG特征提取
HOG特征是一种广泛应用于物体检测领域的特征描述符。它通过计算图像中小区域(称为cell)的梯度直方图来捕捉局部纹理信息,这些信息对于识别特定物体非常有用。
HOG特征提取包括以下步骤:
- 图像归一化:将图像缩放到固定大小。
- 梯度计算:计算每个像素的梯度幅度和方向。
- 细胞分区:将图像分割成小的单元格(cell)。
- 梯度直方图:在每个单元格内统计梯度方向直方图。
- 块标准化:将相邻的单元格组合成块(block),并对每个块内的直方图进行归一化。

4.3 SVM
SVM试图找到一个超平面,使得两类样本之间的间隔最大化。对于线性可分的情况,SVM寻找一个决策边界w⊤x+b=0,其中w是法向量,b是偏置项。

整个算法流程图如下图所示:

5.算法完整程序工程
OOOOO
OOO
O