在PDPS仿真软件中导出的那智机器人离线程序,一般是无法直接给TFD控制装置-那智机器人(丰田式样版)导入及识别使用。因此要对导出的程序进行转换编译处理,才能给TFD那智机器人(丰田式样版)导入离线程序。以下记录一种TFD那智机器人(丰田式样版)离线如何处理的方法。
一、PDPS中导出离线程序的设置
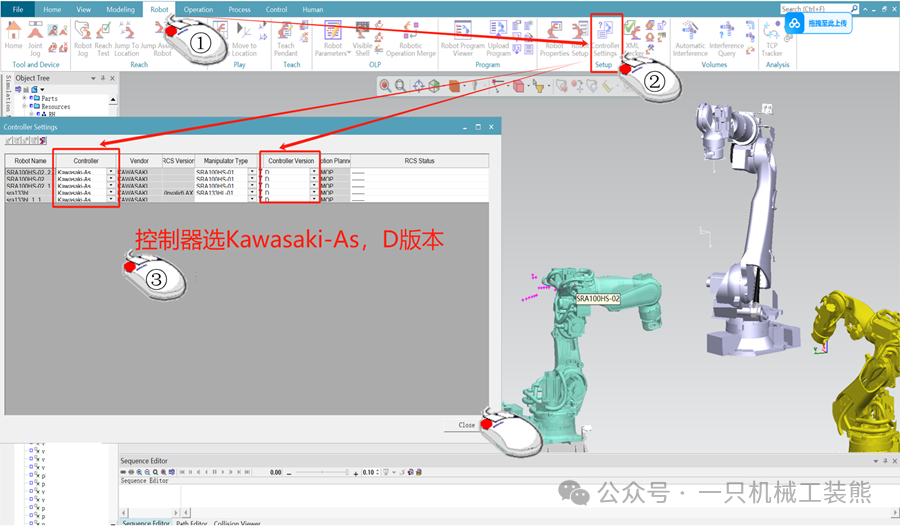
1、此方法这里的那智机器人的控制器选择Kawasaki-As,版本D。
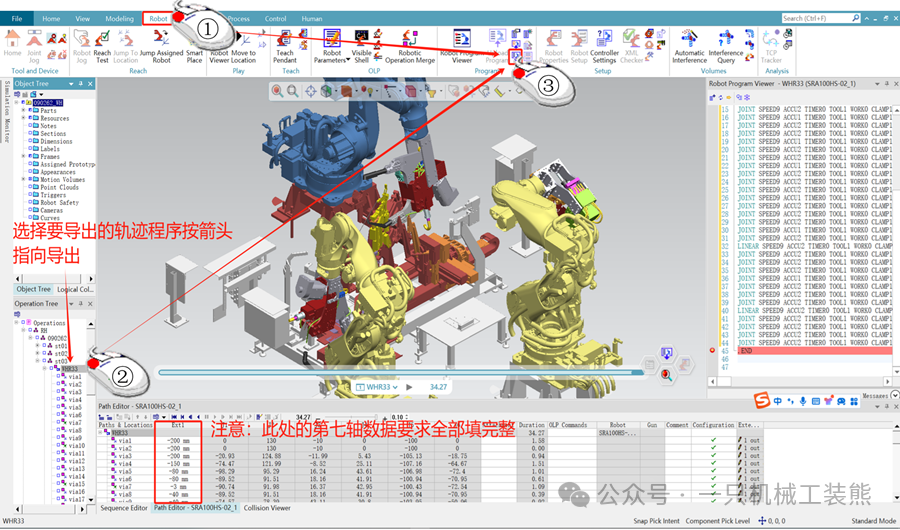
2、确认第七轴数据完整性,然后导出。
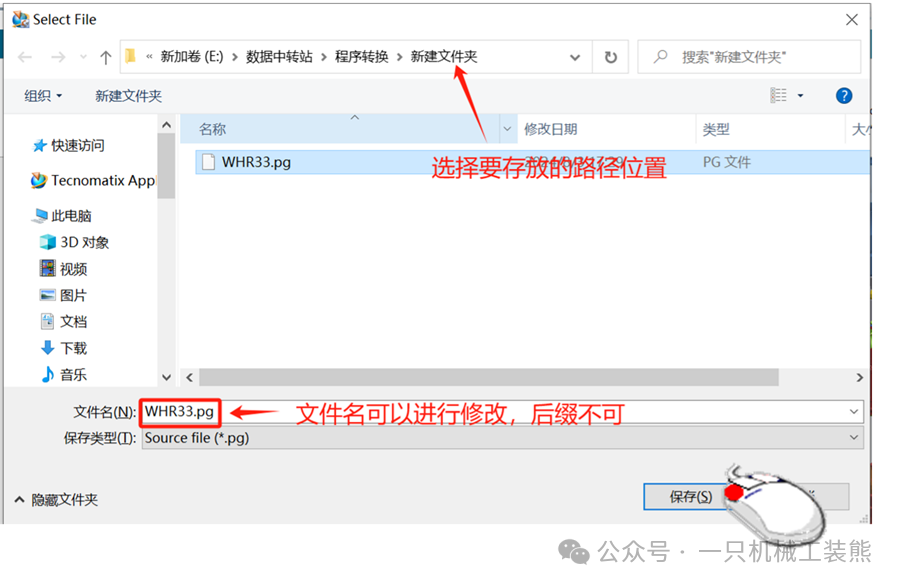
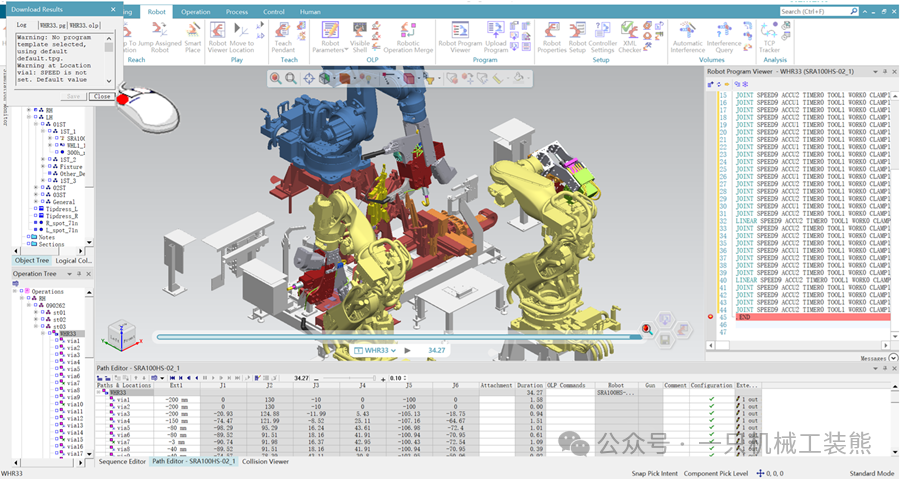
二、导出的离线程序需要通过以下软件转换处理

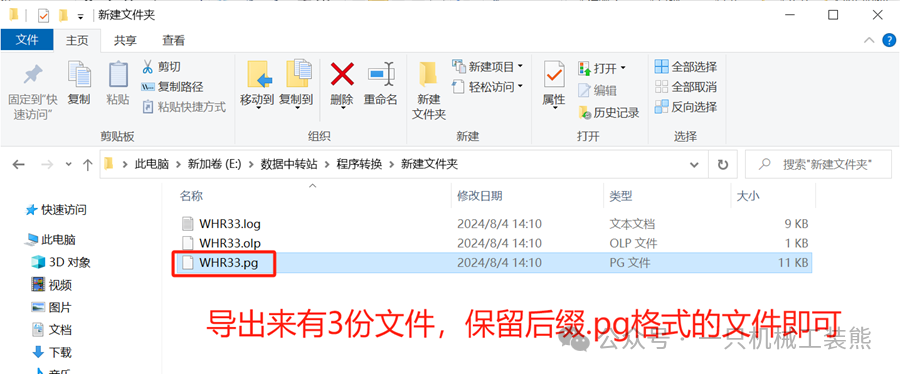
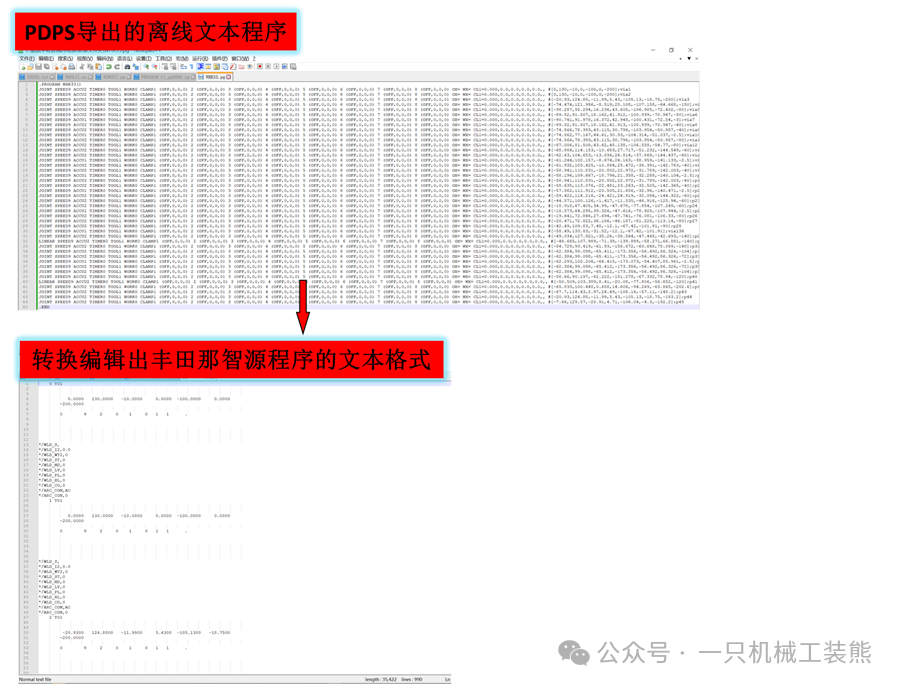
1、使用TFD_Nachi程序转换编辑文本格式,获取到未编译的TFD那智机器人(丰田式样版)的源程序文本内容。
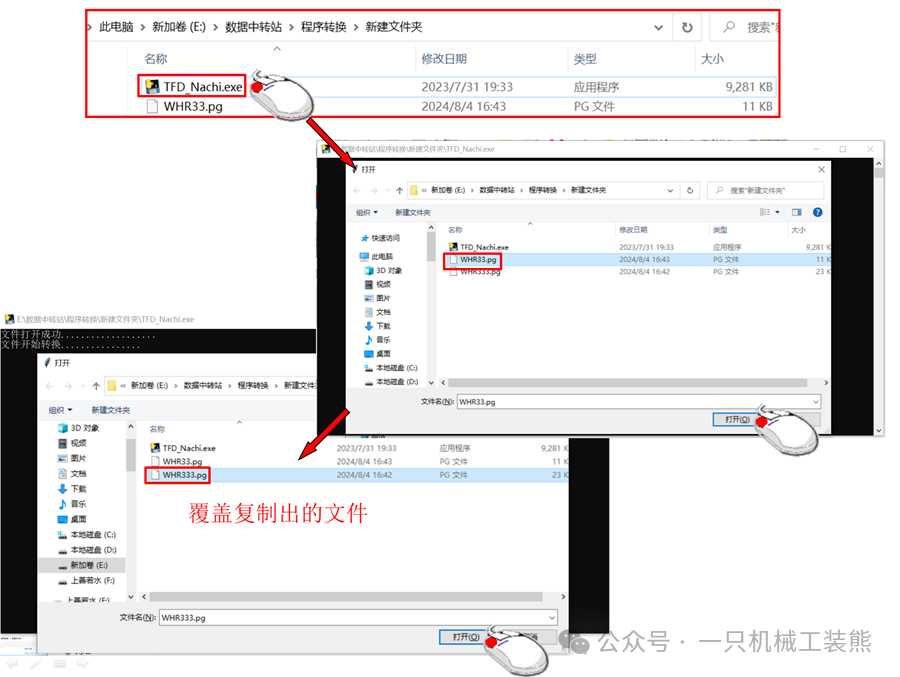
即导出的离线文本轴值程序格式转换为TFD那智机器人(丰田式样版)的源程序文本格式。
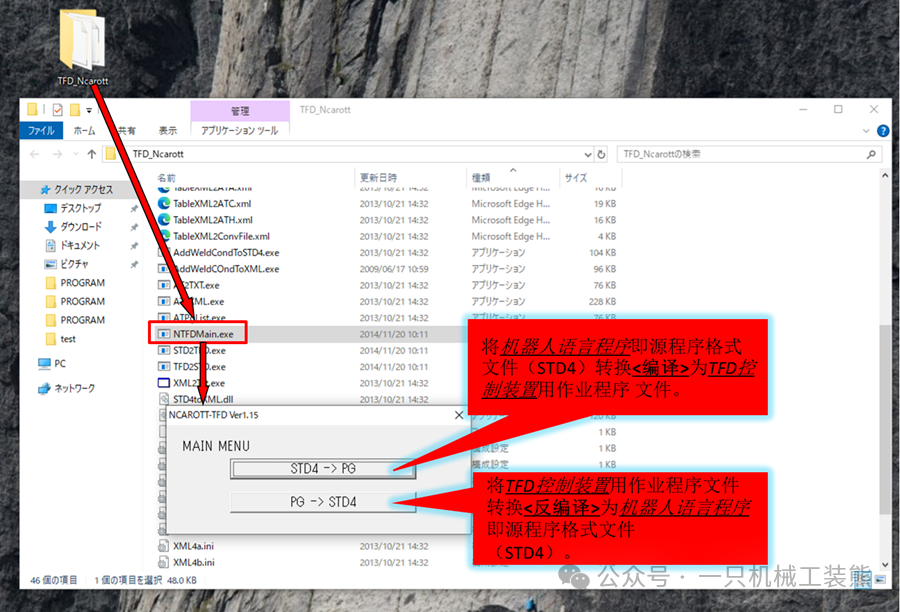
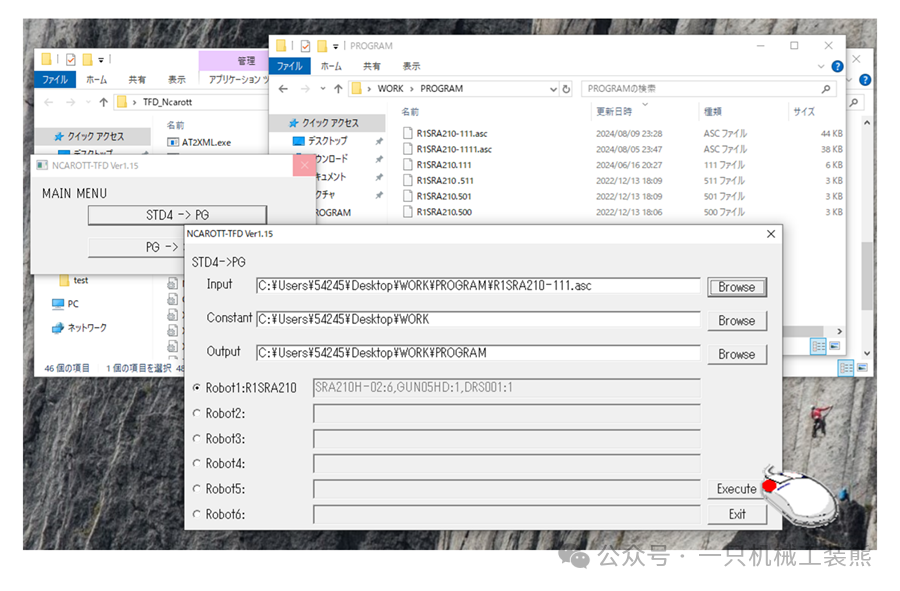
2、用TFD-NCAROTT编译程序对转换出的丰田式样那智机器人源程序进行处理。(关于TFD-NCAROTT编译程序的详细说明,可点击此链接进行了解-关于NACHI机器人语言程序的反编译)
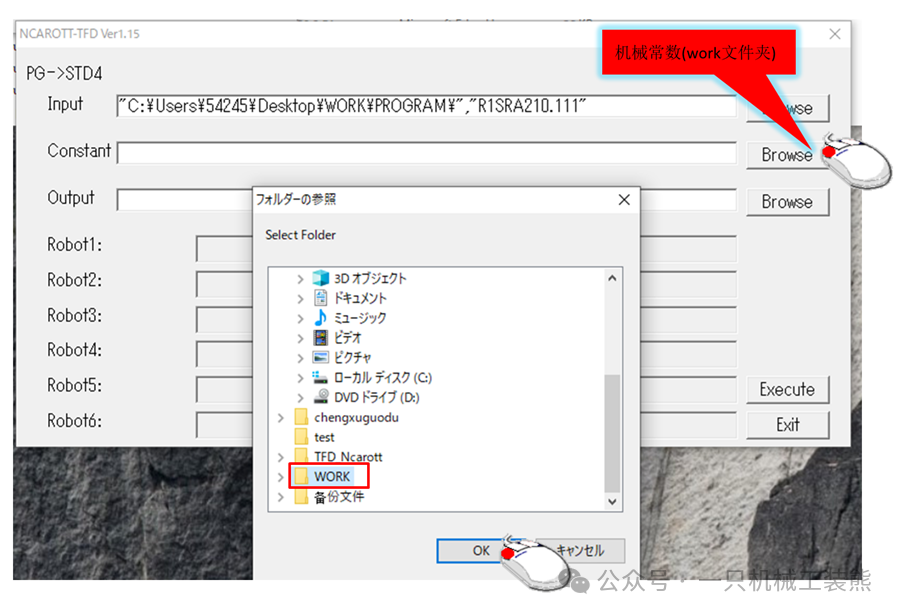
首先在对应的现场机器人示教器上备份机械常数文件(WORK文件夹)(※注:对于要离线的那智机器人获取的机械常数work必须版本型号及哪台机器人使用等要一一对应),然后任意取某程序进行反编译,获取出源程序文本格式作为模版来填充编辑修改应用。
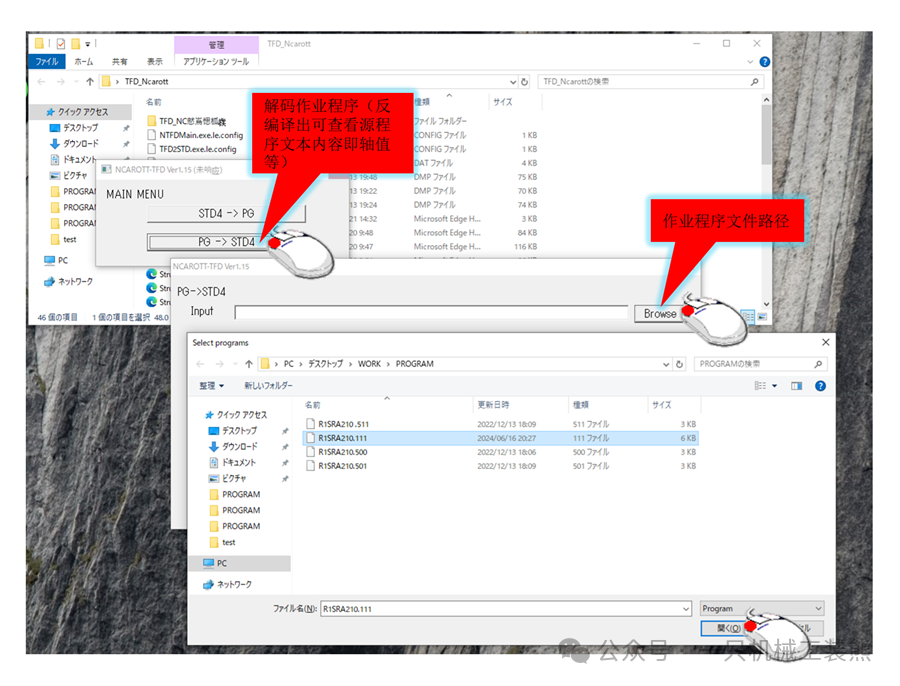
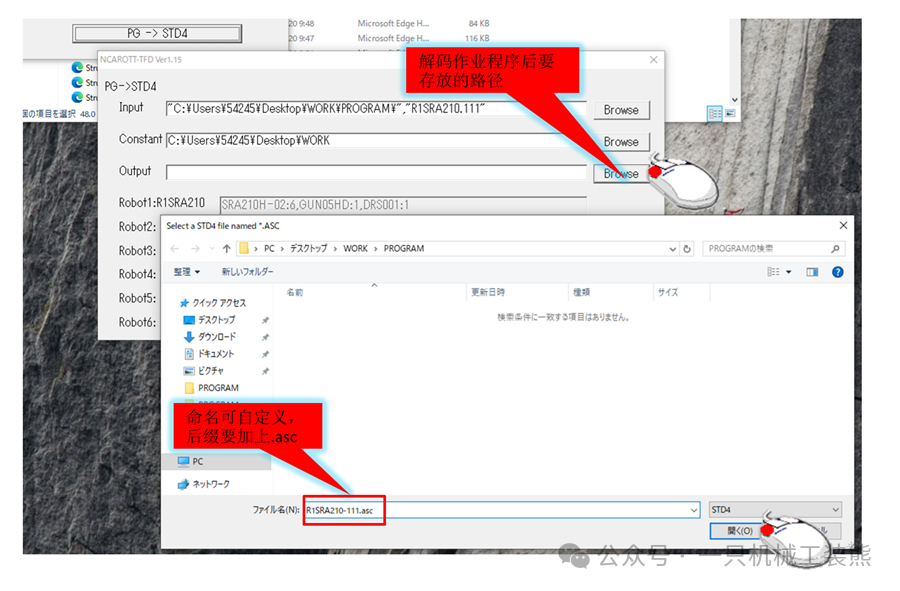
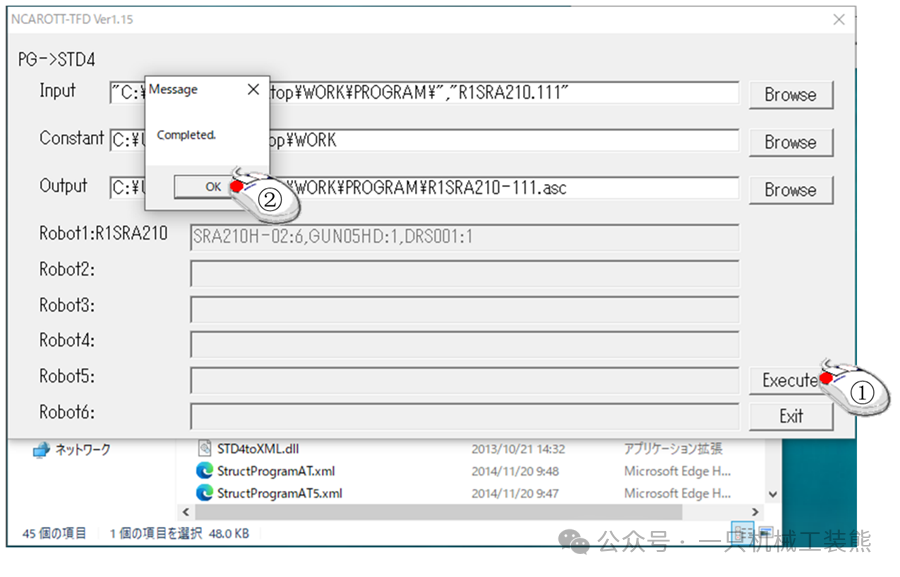
解码(反编译)后得到后缀为.asc的文件,可以通过notepad++打开查看。
3、将TFD_Nazhi.exe转换出的TFD那智机器人源程序(丰田式样版)的文本内容复制替换进解码(反编译)出的.asc文本源程序,利用此.asc格式版本进行替换修改处理出最终的离线文本源程序。

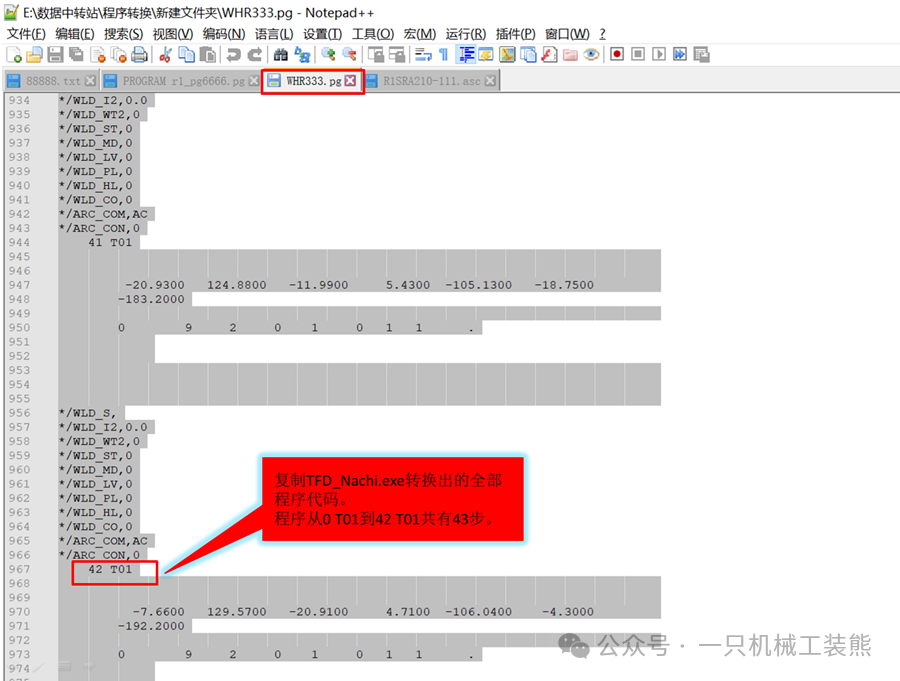
Step1: 复制TFD_Nachi.exe转换出的全部程序代码,程序从0 T01到42 T01共有43步。
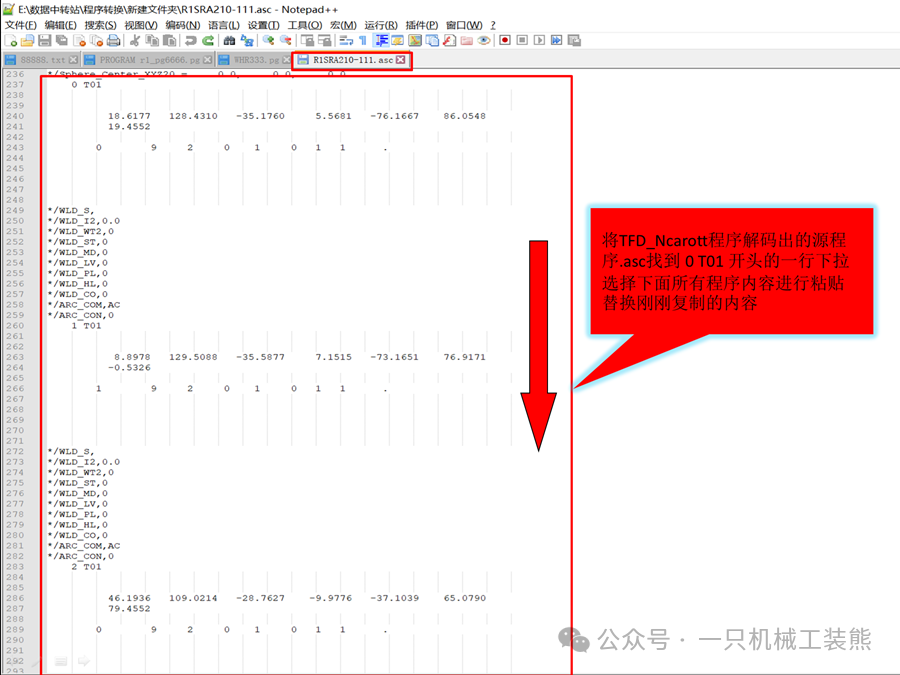
Step2: 将TFD Ncarott程序解码出的源程序.asc找到 0 T01 开头的一行,下拉选择下面所有程序内容进行粘贴替换刚刚Step1复制的内容。
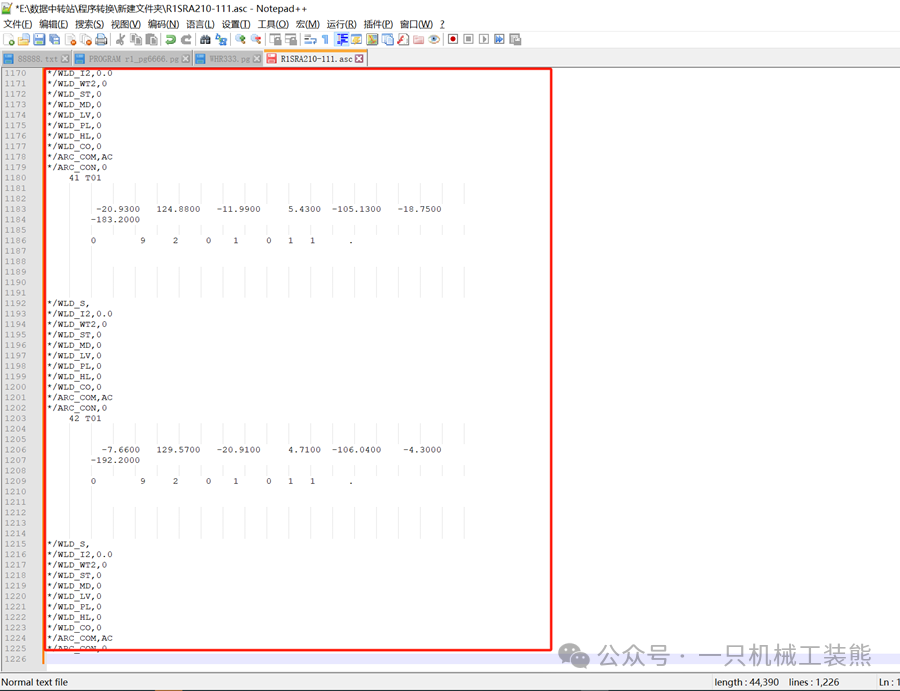
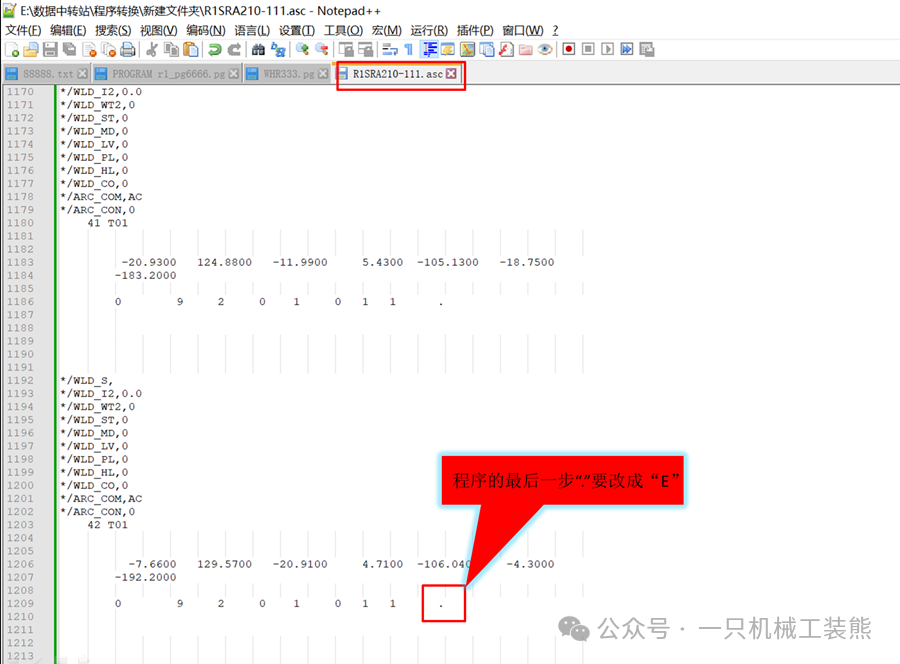
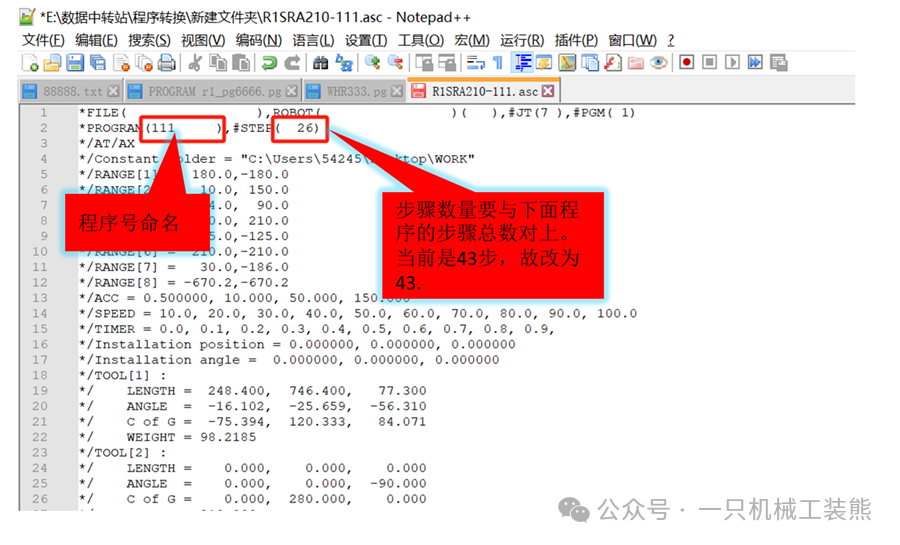
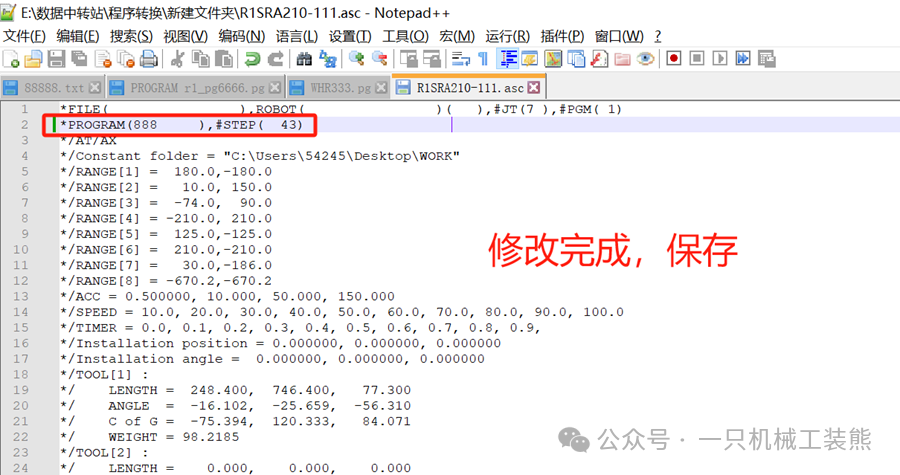
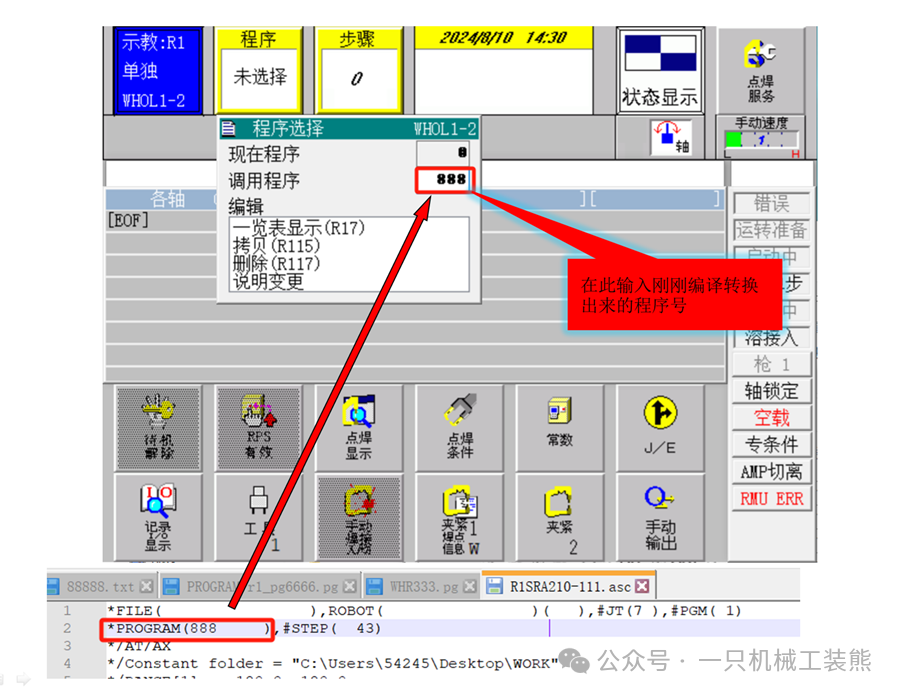
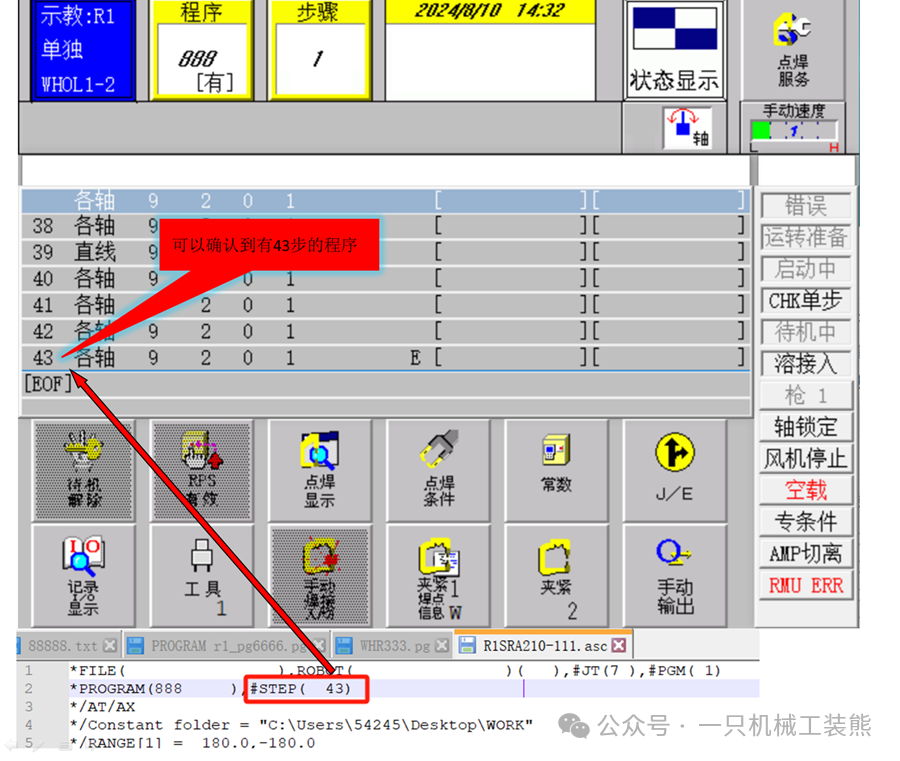
Step3:程序的最后一步“.”要改成“E”,以及程序号填入和STEP 步骤改为修改后的步数,并保存。
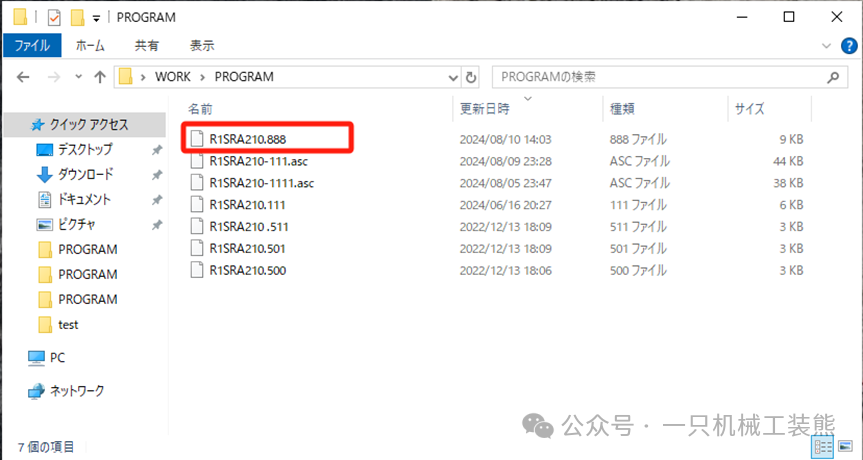
4、对修改后的.asc程序进行编译
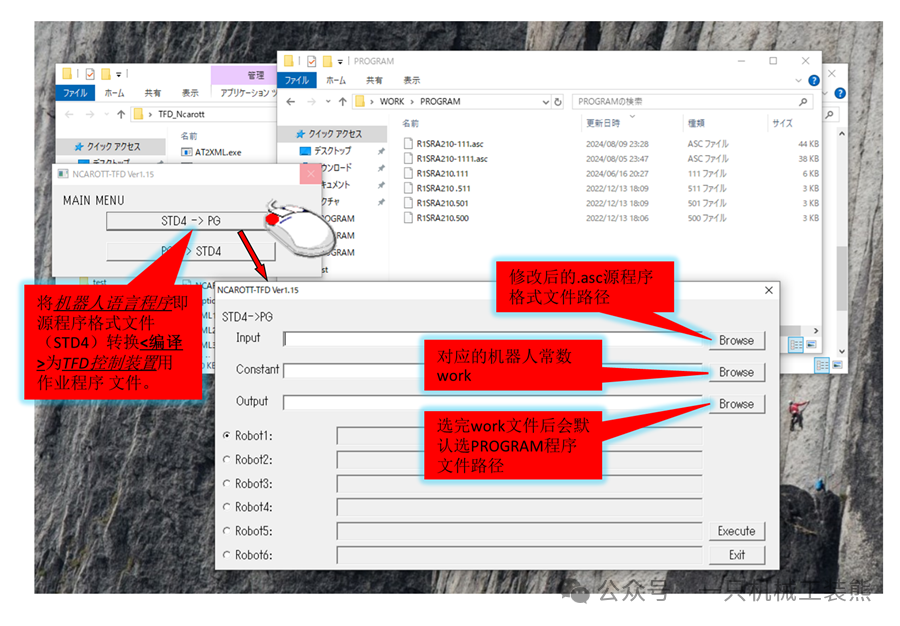
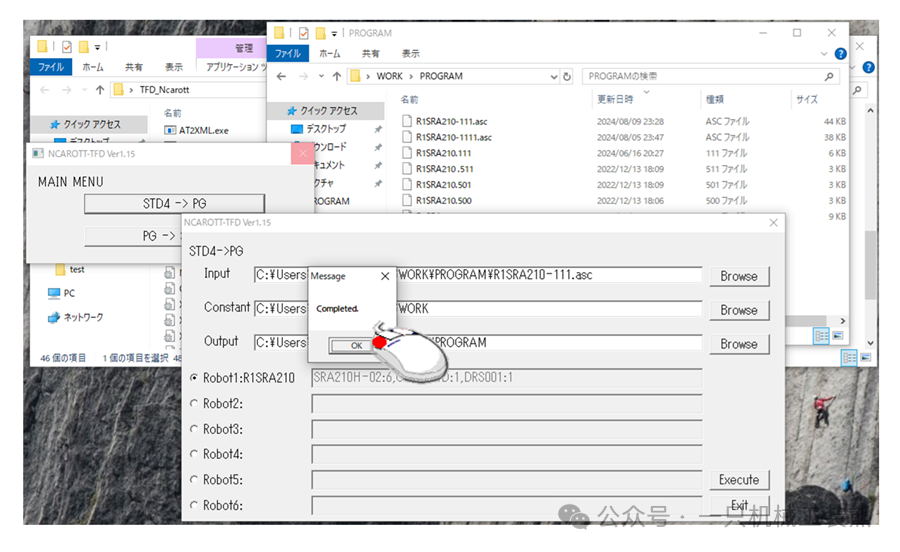
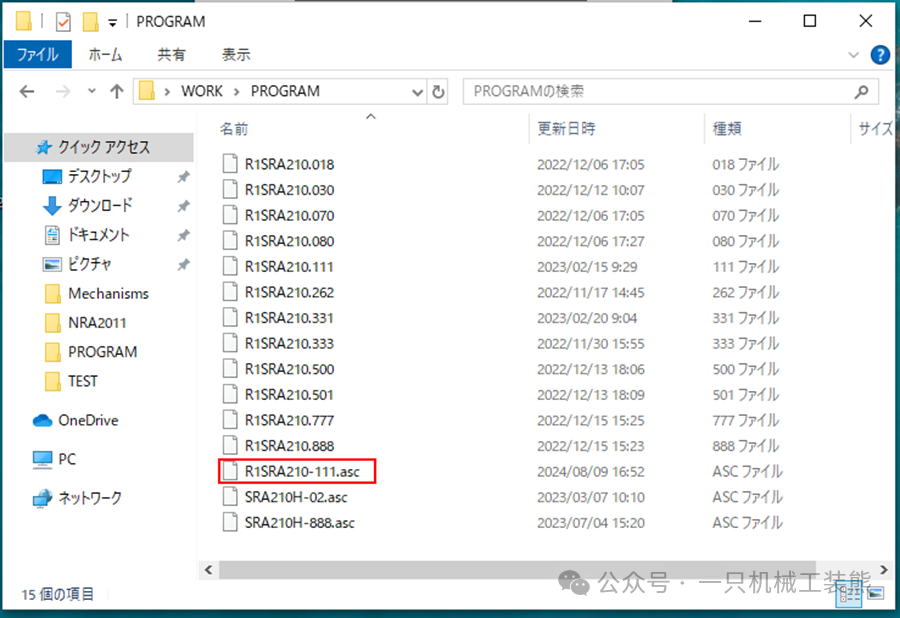
编译成功后,新的程序会以刚命名的程序号转换在PROGRAM文件夹里。至此离线导出的处理即完成。
三、用TFD on Desk那智仿真软件进行程序的验证
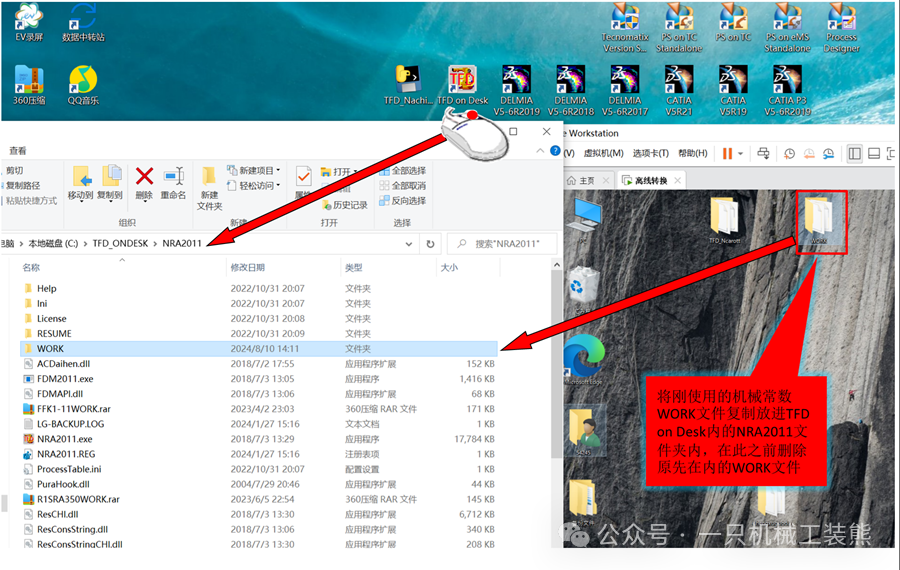
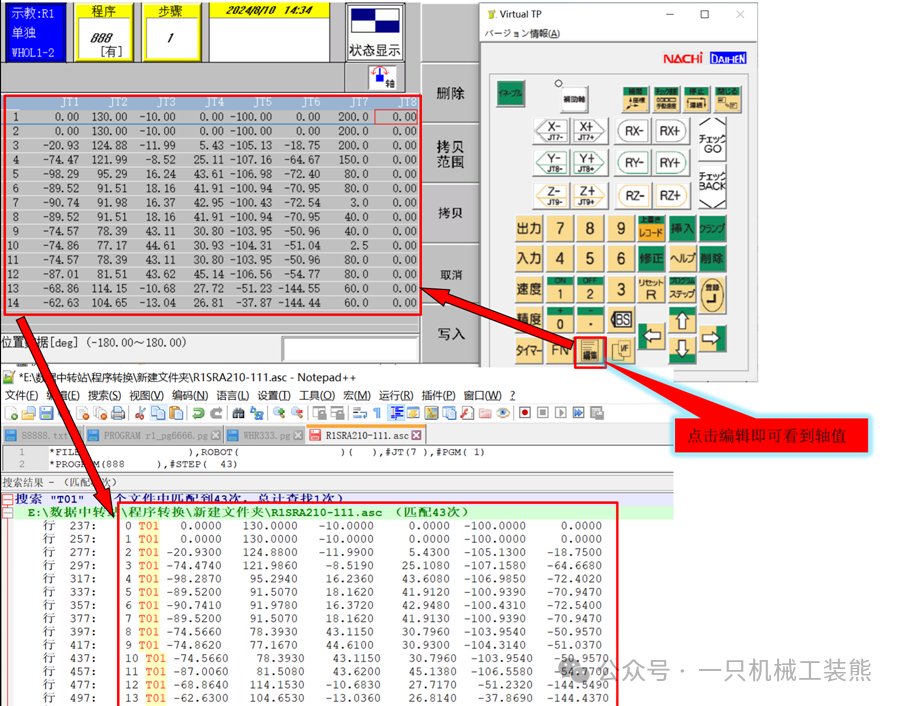
以上验证得出程序编译转换出来是正确的,是丰田式样TFD那智机器人能导入使用的作业程序。(关于TFD on Desk的了解,可点击此链接TFD on Desk V01.04(V01.42)那智仿真离线软件分享/TFD on Desk V01.06 (V01.60)丰田那智仿真离线软件)
整体上PDPS仿真软件导出TFD那智机器人离线后处理到能导入机器人识别的程序就是这样的过程。
丰田版那智离线导出处理方法