接上期:
OpenCV基础——图像滤波和形态学操作-CSDN博客
一.梯度计算
上贴已经讲过,梯度可以浅显地理解为图像中发生颜色变化的局部区域,也即边界点。本质上是通过构造与卷积核相同的矩阵,计算边缘区域像素点的差异值——也即梯度:

1.sobel算子
sobel函数中的第二个参数相当于扩充位数,意味着可以存在负数,1和0分别表示水平和垂直梯度,这里哪个为1表示算哪个,最后是核函数的大小:
sobel=cv2.Sobel(thresh,cv2.CV_64F,1,0,ksize=3)
cv_show(sobel,'sobel')这里还用的上贴的图,需要注意的是要把图像转换为灰度图再计算边缘,这里不再赘述:

这时大家能看出来一些端倪——好像只显示了轴对称的一半?这是因为图像梯度的计算方式为核矩阵右边的元素减左边的元素,而我们选的图为外黑内白,这样的话白减黑为白色,黑减白为负由于阈值问题统一变为黑色,因此这里显示不出来,而那条竖杠也是这个道理~

因此我们要将被截断的负数取绝对值,这样另一半也能正常显示:

为了防止各位不看上贴有点蒙圈,这里再展示一下垂直方式梯度的完整代码:
import cv2
def cv_show(img,name):cv2.imshow(name,img)cv2.waitKey(0)cv2.destroyAllWindows()
img=cv2.imread('D:\\Circle.jpg')
img=cv2.resize(img,(0,0),fx=0.7,fy=0.7)
img=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
ret,thresh = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
sobel=cv2.Sobel(thresh,cv2.CV_64F,0,1,ksize=3)
sobel=cv2.convertScaleAbs(sobel)
cv_show(sobel,'sobel')效果有点像水平旋转了一下:

分别得到水平和垂直的梯度,然后用我们第一帖里面提到的addweight函数叠加一下即可:
sobelx=cv2.Sobel(thresh,cv2.CV_64F,1,0,ksize=3)
sobelx=cv2.convertScaleAbs(sobelx)
sobely=cv2.Sobel(thresh,cv2.CV_64F,0,1,ksize=3)
sobely=cv2.convertScaleAbs(sobely)
sobel=cv2.addWeighted(sobelx,0.5,sobely,0.5,0)相比单向的,缺少的线条更合理地展现了出来:

注意,最好不要同时计算水平和垂直的梯度,效果不如分开算的好。
我们再换一张图整体展示一下梯度计算的效果:
import cv2
import numpy as np
def cv_show(img,name):cv2.imshow(name,img)cv2.waitKey(0)cv2.destroyAllWindows()
img=cv2.imread('D:\\Bayern.jpg')
img=cv2.resize(img,(0,0),fx=0.7,fy=0.7)
img=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
ret,thresh = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
sobelx=cv2.Sobel(thresh,cv2.CV_64F,1,0,ksize=3)
sobelx=cv2.convertScaleAbs(sobelx)
sobely=cv2.Sobel(thresh,cv2.CV_64F,0,1,ksize=3)
sobely=cv2.convertScaleAbs(sobely)
sobel=cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
tog=np.hstack((thresh,sobel))
cv_show(tog,'tog')
实际上,如果不做阈值操作效果会更好,大家自行尝试:

2.scharr算子

思想上来说没什么区别,只是核中的值较前者会更大一些,在边缘检测的效果中会更加敏感~
scharrx=cv2.Scharr(thresh,cv2.CV_64F,1,0)
scharry=cv2.Scharr(thresh,cv2.CV_64F,0,1)
scharr=cv2.addWeighted(scharrx,0.5,scharry,0.5,0)
tog=np.hstack((thresh,scharr))
cv_show(tog,"tog")另一个区别是scharr中没有核大小的参数。

3.lapkacian算子
较前两者会更加敏感一些,与此同时不可避免地会对噪声点也敏感,因此效果不一定会更好,往往需要配合其他方法使用。

另一个不同是当前点要和周围四个点的值相关,因此不需要像前两者一样分别计算竖直和水平再聚合:
import cv2
import numpy as np
def cv_show(img,name):cv2.imshow(name,img)cv2.waitKey(0)cv2.destroyAllWindows()
img=cv2.imread('D:\\Bayern.jpg')
img=cv2.resize(img,(0,0),fx=0.7,fy=0.7)
img=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
ret,thresh = cv2.threshold(img,127,255,cv2.THRESH_BINARY)
sobelx=cv2.Sobel(thresh,cv2.CV_64F,1,0,ksize=3)
sobelx=cv2.convertScaleAbs(sobelx)
sobely=cv2.Sobel(thresh,cv2.CV_64F,0,1,ksize=3)
sobely=cv2.convertScaleAbs(sobely)
sobel=cv2.addWeighted(sobelx,0.5,sobely,0.5,0)scharrx=cv2.Scharr(thresh,cv2.CV_64F,1,0)
scharry=cv2.Scharr(thresh,cv2.CV_64F,0,1)
scharr=cv2.addWeighted(scharrx,0.5,scharry,0.5,0)laplacian=cv2.Laplacian(thresh,cv2.CV_64F)
laplacian=cv2.convertScaleAbs(laplacian)tog=np.vstack((sobel,scharr,laplacian))
cv_show(tog,"tog")这里直接聚合展示:

事实上,无论哪种边缘检测,还是要结合具体应用场景和图片才能更好地评价优劣~
二.边缘检测
这里介绍的是Canny边缘检测算法:
1.高斯滤波降噪
先对图像进行一个平滑处理,避免噪点影响梯度计算~

满足高斯的思想,越接近中心权值越大,这里对核进行了归一化处理~
2.计算梯度强度和方向
不仅计算梯度大小,还要计算方向,这里使用了sobel算子~

有了水平和垂直的梯度直接用反三角函数就可以求出来角度大小。
3.非极大值抑制
简单来说就是将最明显的边界值体现出来~

比较当前点和周围两个点幅值大小,如果是最大的就保存,如果不是最大就抑制掉(舍弃)~

4.双阈值检测完成抑制孤立的弱边缘
对边界候选值再进行一次过滤,保留更真实的一些~

总的来说就是保留更真实的边界。对于minval来说,如果相对小,则对于边缘的筛选相对放宽,较大则相对严格;maxval同样是这个规律。
5.效果
这里写法要改一下,直接读取为灰度图并且不需要阈值操作了。通过canny函数自行设置maxval和minval:
import cv2
import numpy as np
def cv_show(img,name):cv2.imshow(name,img)cv2.waitKey(0)cv2.destroyAllWindows()
img=cv2.imread('D:\\Bayern.jpg',cv2.IMREAD_GRAYSCALE)
img=cv2.resize(img,(0,0),fx=0.7,fy=0.7)
img1=cv2.Canny(img,130,190)
img2=cv2.Canny(img,80,140)
tog=np.vstack((img,img1,img2))
cv_show(tog,'tog.jpg')题外话,无论是直接读取为灰度图还是先读入彩色图再转换,效果都一样:
import cv2 import numpy as np def cv_show(img,name):cv2.imshow(name,img)cv2.waitKey(0)cv2.destroyAllWindows() img1=cv2.imread('D:\\Bayern.jpg',cv2.IMREAD_GRAYSCALE) img1=cv2.resize(img1,(0,0),fx=0.7,fy=0.7) img2=cv2.imread('D:\\Bayern.jpg') img2=cv2.resize(img2,(0,0),fx=0.7,fy=0.7) img2=cv2.cvtColor(img2,cv2.COLOR_BGR2GRAY) tog=np.vstack((img1,img2)) cv_show(tog,'tog')

很明显,阈值越大则检测出来的其他边缘越多,换句话说,精度更高,但我们不一定需要~毕竟和自然规律一样,并不是事物都是越大、越多越好

我们再换一张看看:稍微归纳一下,越是对比度不明显的图片,越适合将max和min设置得小一些~

三.图像金字塔
通俗地说,将图像组装成为更像金字塔的形状:
1.高斯金字塔
验证金字塔底部往尖走是向下采样,即金字塔越来越小;向上采样则反之:本质上就是滤波~

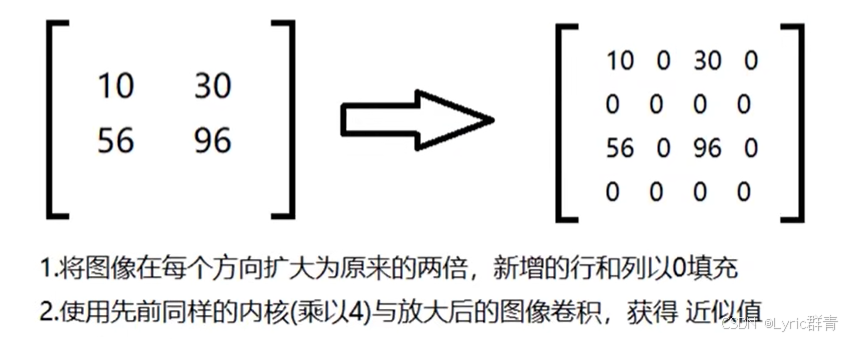
原理上来说,有点像原始数据不够,通过插值法来获取更多数据的操作~
import cv2
import numpy as np
def cv_show(img,name):cv2.imshow(name,img)cv2.waitKey(0)cv2.destroyAllWindows()
img=cv2.imread('D:\\Code.jpg',cv2.IMREAD_GRAYSCALE)
img=cv2.resize(img,(0,0),fx=0.5,fy=0.5)
up1=cv2.pyrUp(img)
up2=cv2.pyrUp(up1)
cv_show(up1,"up1")但需要注意的是,上采样和下采样并不能相互抵消,因为在采样过程中又赋值为0的操作,这会损失信息:
import cv2
import numpy as np
def cv_show(img,name):cv2.imshow(name,img)cv2.waitKey(0)cv2.destroyAllWindows()
img=cv2.imread('D:\\Code.jpg',cv2.IMREAD_GRAYSCALE)
img=cv2.resize(img,(0,0),fx=0.5,fy=0.5)
newimg=cv2.pyrDown(img)
newimg=cv2.pyrUp(newimg)
tog=np.hstack((img,newimg))
cv_show(tog,'tog')相较原来变得更加模糊:

2.拉普拉斯金字塔
原理公式如下:
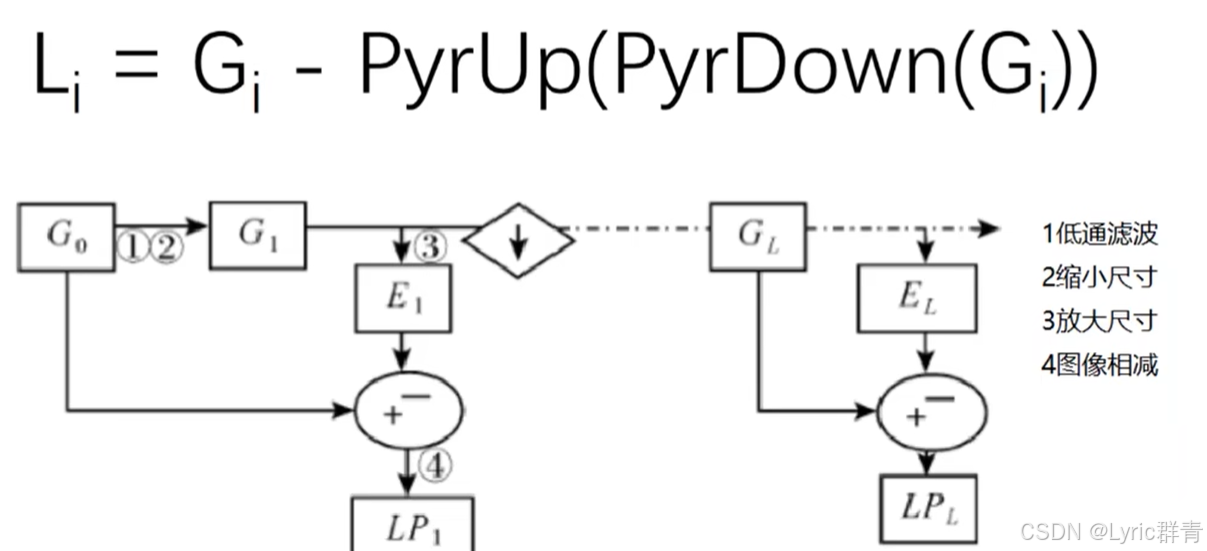
和上面有点像,先down一下再up一下,然后再用原始图减去这个结果:
import cv2
import numpy as np
def cv_show(img,name):cv2.imshow(name,img)cv2.waitKey(0)cv2.destroyAllWindows()
img=cv2.imread('D:\\Code.jpg')
img=cv2.resize(img,(0,0),fx=0.5,fy=0.5)
newimg=cv2.pyrDown(img)
newimg=cv2.pyrUp(newimg)
answer=img-newimg
tog=np.hstack((img,answer))
cv_show(tog,'tog')这里用彩色图效果更加明显:

顺便说一下,up和down的顺序相反,效果也是不同的:
up_down=cv2.pyrUp(img)
up_down=cv2.pyrDown(up_down)
down_up=cv2.pyrDown(img)
down_up=cv2.pyrUp(down_up)
tog=np.hstack((up_down,down_up))
cv_show(tog,'tog')
本帖篇幅差不多了,下期继续~