在LabVIEW项目中,选择增量式(Incremental Encoder)和绝对式(Absolute Encoder)编码器取决于项目的具体需求。增量式编码器和绝对式编码器在工作原理、应用场景、精度和成本等方面存在显著差异。以下从多方面详细阐述两者的区别及如何根据应用场景进行选型。
一、增量式编码器与绝对式编码器的区别
1. 工作原理
-
增量式编码器
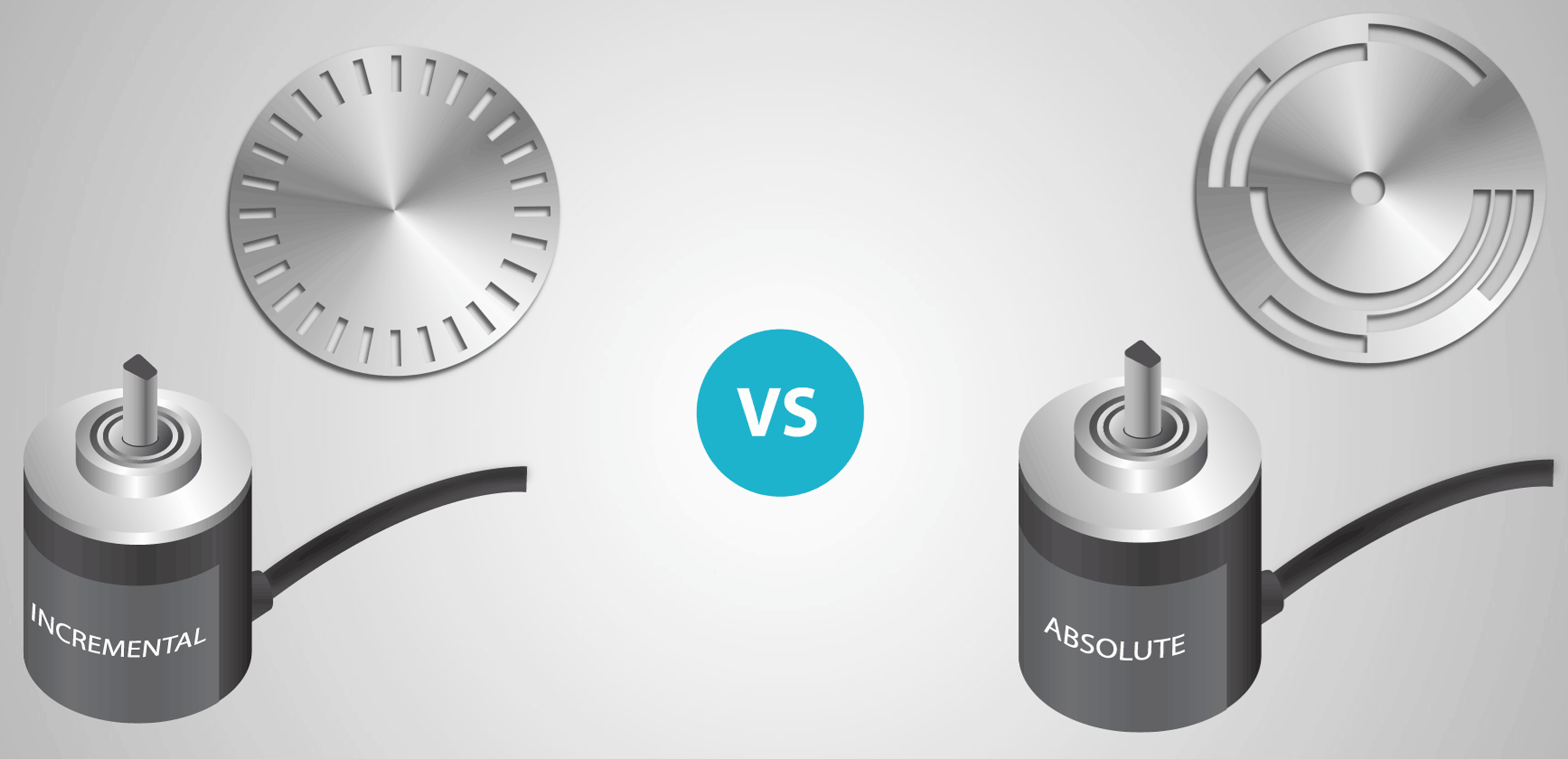
增量式编码器通过输出脉冲信号来记录位移变化。编码器本身并不记录实际的绝对位置,而是从当前位置开始,基于移动的方向和距离发出增量脉冲。每次开机后,增量式编码器需要从一个参考位置开始计数(通常通过归零或限位开关实现),才能确定当前位置。 -
绝对式编码器
绝对式编码器在每个位置都有一个唯一的编码,即使编码器断电或系统重启后,仍然能够读取到当前的精确位置。这是因为每个位置都有一个独立的编码值,表示绝对位置,编码器可以在任何时间提供位置信息。
2. 位置记忆
-
增量式编码器:断电后无法保存位置,需重新归零或参考标志。
-
绝对式编码器:断电后仍可保留位置信息,不需要重新归零。
3. 精度与分辨率
-
增量式编码器:分辨率是通过每转的脉冲数决定的,精度取决于脉冲检测系统以及计数器的精度。对于高精度的需求,可以选用高分辨率的增量式编码器。
-
绝对式编码器:精度取决于编码器的编码位数,位数越多,精度越高。例如,12位绝对编码器可提供4096个唯一位置(2^12),每个位置对应不同的编码值。
4. 响应速度
-
增量式编码器:因为增量式编码器只输出脉冲信号,在速度或加速度检测应用中表现较好,特别适合高速旋转的设备。
-
绝对式编码器:相对增量式编码器而言,绝对式编码器可能在极高速的应用中不如增量式编码器,但它在需要实时位置反馈的系统中表现更为稳定。
5. 应用场景
-
增量式编码器:
-
适合需要检测速度、角度变化、相对位移的应用,如电机控制、速度反馈系统、自动化设备等。
-
通常用于需要高分辨率但不需要实时绝对位置的场合。
-
-
绝对式编码器:
-
适合需要记录精确位置,并在断电后保持位置记忆的应用,如机器人、自动化生产线的绝对位置控制、精密加工设备、伺服控制系统等。
-
通常用于要求高精度、系统安全性高、断电后无需重新归零的场合。
-
二、如何选型
1. 应用需求分析
根据实际项目需求,确定是否需要断电后的位置信息:
-
如果系统每次启动后都必须从零点或参考点重新归位,且不需要记忆绝对位置,增量式编码器更为经济且适用。
-
如果系统需要在断电或重启后立即知道当前位置,且对精度要求较高,绝对式编码器会是更好的选择。
2. 精度与分辨率需求
如果项目对精度要求较高,且需要精确反馈位置信息:
-
对于较高分辨率和相对位置的检测,选用高分辨率增量式编码器。
-
对于精确的绝对位置需求,可选择高位数的绝对式编码器。
3. 响应速度与控制类型
-
对于高速运动系统,增量式编码器由于其简单脉冲输出,适合实时的速度反馈。
-
对于需要实时精确位置反馈的场合,如机器人或精密设备,绝对式编码器能够提供更稳定的性能。
4. 环境与成本
-
增量式编码器通常较为经济,适用于预算有限且对断电位置保持要求不高的场合。
-
绝对式编码器价格较高,但提供了更可靠的位置信息,因此在关键控制系统或需要高精度和高可靠性的项目中更具优势。
5. LabVIEW项目中的集成
在LabVIEW中集成编码器,通常使用NI的高速数据采集模块或运动控制模块进行信号的读取和处理。LabVIEW可以通过内置的NI Motion或DAQmx库来与编码器通信,并结合PID控制、数据采集和系统反馈,实现复杂的控制逻辑。
三、总结
增量式编码器和绝对式编码器各有优缺点,选择适合的编码器需要考虑项目的实际需求。在LabVIEW项目中,如果要求高精度、实时反馈和断电保持位置,绝对式编码器是首选;如果仅需要相对位置检测和速度反馈,且系统允许归零操作,增量式编码器则更加经济实惠。