作者 | 爱问问题的王宸 编辑 | 极市平台
原文链接:https://www.zhihu.com/question/362131975/answer/3058958207
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心技术交流群
导读
提出反问并思考是最好的学习方式,本文通过提出十八个问题并解答的方式,对Transformer整体的结构和细节进行了阐述。
为什么想通过十八个问题的方式总结Transformer?
有两点原因:
第一,Transformer是既MLP、RNN、CNN之后的第四大特征提取器,也被称为第四大基础模型;最近爆火的chatGPT,其最底层原理也是Transformer,Transformer的重要性可见一斑。
第二,希望通过问问题这种方式,更好的帮助大家理解Transformer的内容和原理。
1.2017年深度学习领域的重大突破是什么?
Transformer。有两方面的原因:
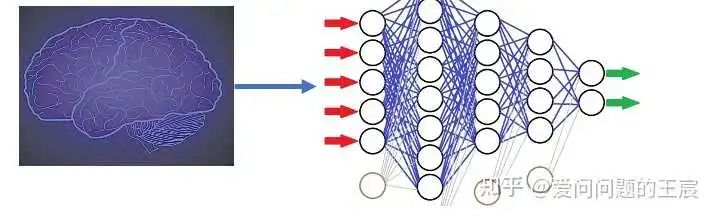
1.1 一方面,Transformer是深度学习领域既MLP、RNN、CNN之后的第4大特征提取器(也被称为基础模型)。什么是特征提取器?大脑是人与外部世界(图像、文字、语音等)交互的方式;特征提取器是计算机为了模仿大脑,与外部世界(图像、文字、语音等)交互的方式,如图1所示。举例而言:Imagenet数据集中包含1000类图像,人们已经根据自己的经验把这一百万张图像分好1000类,每一类图像(如美洲豹)都有独特的特征。这时,神经网络(如ResNet18)也是想通过这种分类的方式,把每一类图像的特有特征尽可能提取或识别出来。分类不是最终目的,而是一种提取图像特征的手段,掩码补全图像也是一种提取特征的方式,图像块顺序打乱也是一种提取特征的方式。
1.2 另一方面,Transformer在深度学习领域扮演的角色:第3次和第4次热潮的基石,如下图2所示。

2. Transformer的提出背景是什么?
2.1 在领域发展背景层面:当时时处2017年,深度学习在计算机视觉领域火了已经几年。从Alexnet、VGG、GoogLenet、ResNet、DenseNet;从图像分类、目标检测再到语义分割;但在自然语言处理领域并没有引起很大反响。
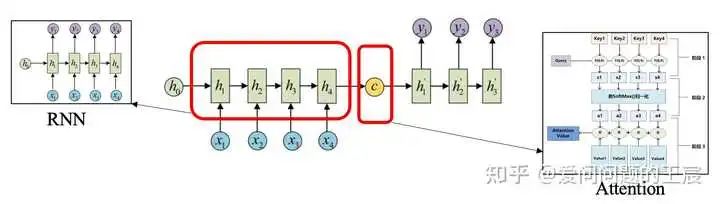
2.2 技术背景层面:(1)当时主流的序列转录任务(如机器翻译)的解决方案如下图3所示,在Sequence to Sequence架构下(Encoder- Decoder的一种),RNN来提取特征,Attention机制将Encoder提取到的特征高效传递给Decoder。(2)这种做法有两个不足之处,一方面是在提取特征时的RNN天生从前向后时序传递的结构决定了其无法并行运算,其次是当序列长度过长时,最前面序列的信息有可能被遗忘掉。因此可以看到,在这个框架下,RNN是相对薄弱急需改进的地方。
3. Transformer到底是什么?
3.1 Transformer是一种由Encoder和Decoder组成的架构。那么什么是架构呢?最简单的架构就是A+B+C。
3.2 Transformer也可以理解为一个函数,输入是“我爱学习”,输出是“I love study”。
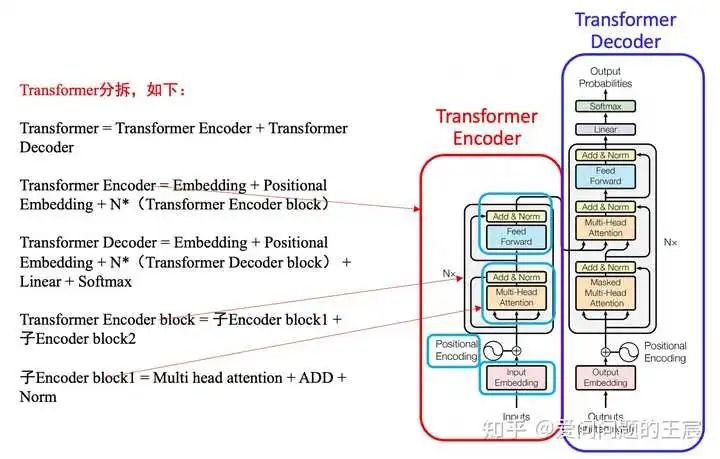
3.3 如果把Transformer的架构进行分拆,如图4所示。
4. 什么是Transformer Encoder?
4.1 从功能角度,Transformer Encoder的核心作用是提取特征,也有使用Transformer Decoder来提取特征。例如,一个人学习跳舞,Encoder是看别人是如何跳舞的,Decoder是将学习到的经验和记忆,展现出来
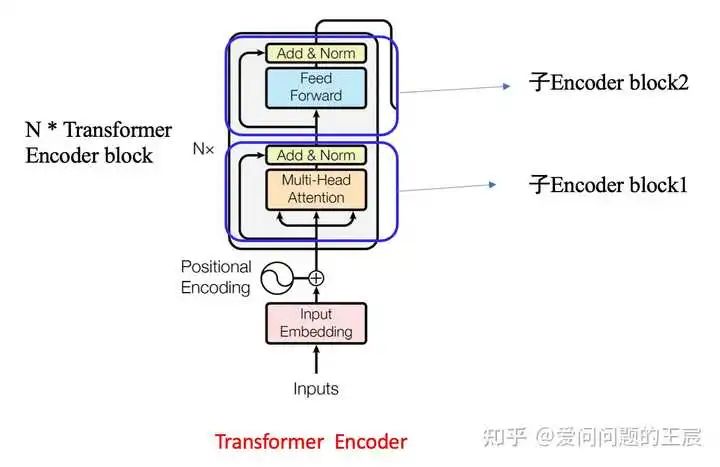
4.2 从结构角度,如图5所示,Transformer Encoder = Embedding + Positional Embedding + N*(子Encoder block1 + 子Encoder block2);
子Encoder block1 = Multi head attention + ADD + Norm;
子Encoder block2 = Feed Forward + ADD + Norm;
4.3 从输入输出角度,N个Transformer Encoder block中的第一个Encoder block的输入为一组向量 X = (Embedding + Positional Embedding),向量维度通常为512*512,其他N个TransformerEncoder block的输入为上一个 Transformer Encoder block的输出,输出向量的维度也为512*512(输入输出大小相同)。
4.4 为什么是512*512?前者是指token的个数,如“我爱学习”是4个token,这里设置为512是为了囊括不同的序列长度,不够时padding。后者是指每一个token生成的向量维度,也就是每一个token使用一个序列长度为512的向量表示。人们常说,Transformer不能超过512,否则硬件很难支撑;其实512是指前者,也就是token的个数,因为每一个token要做self attention操作;但是后者的512不宜过大,否则计算起来也很慢。
5. 什么是Transformer Decoder?
5.1 从功能角度,相比于Transformer Encoder,Transformer Decoder更擅长做生成式任务,尤其对于自然语言处理问题。
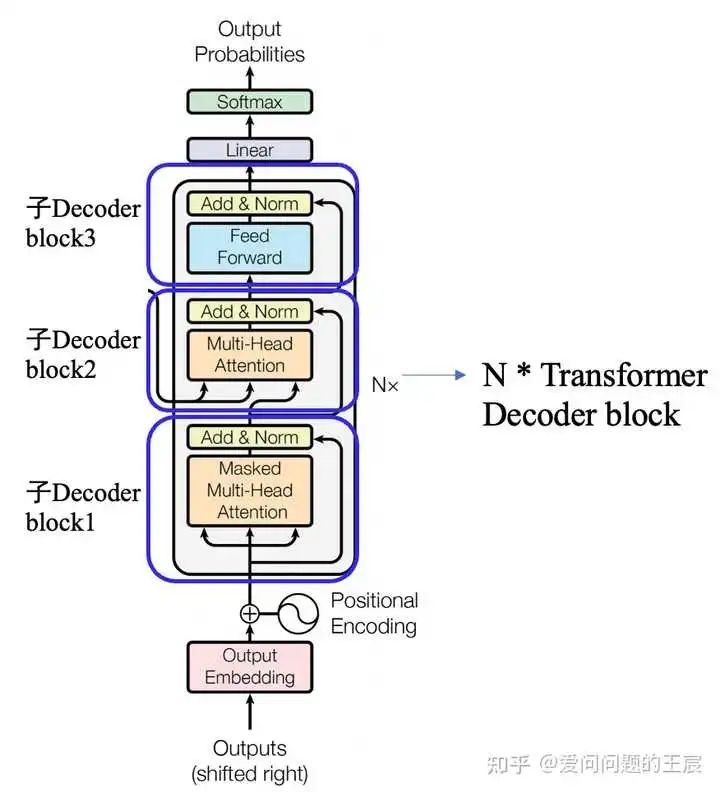
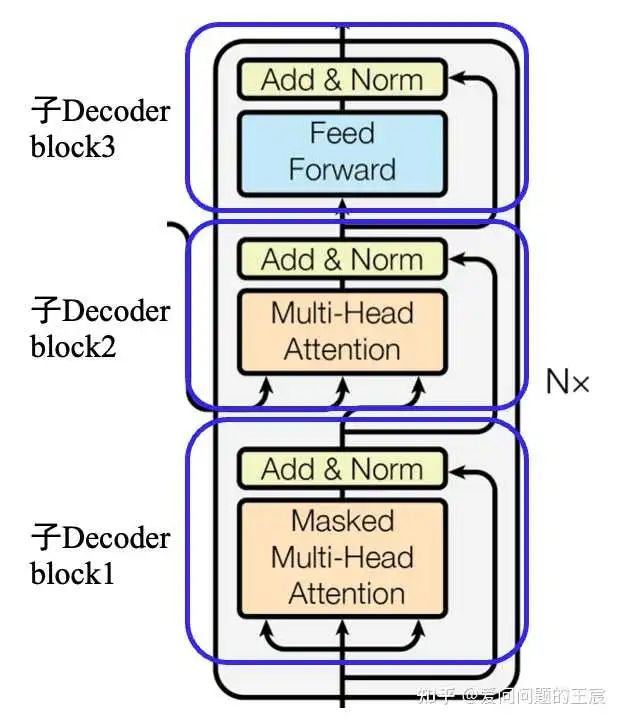
5.2 从结构角度,如图6所示,Transformer Decoder = Embedding + Positional Embedding + N*(子Decoder block1 + 子Decoder block2 + 子Decoder block3)+ Linear + Softmax;
子Decoder block1 = Mask Multi head attention + ADD + Norm;
子Decoder block2 = Multi head attention + ADD + Norm;
子Decoder block3 = Feed Forward + ADD + Norm;
5.3 从(Embedding+Positional Embedding)(N个Decoder block)(Linear + softmax) 这三个每一个单独作用角度:
Embedding + Positional Embedding :以机器翻译为例,输入“Machine Learning”,输出“机器学习”;这里的Embedding是把“机器学习”也转化成向量的形式。
N个Decoder block:特征处理和传递过程。
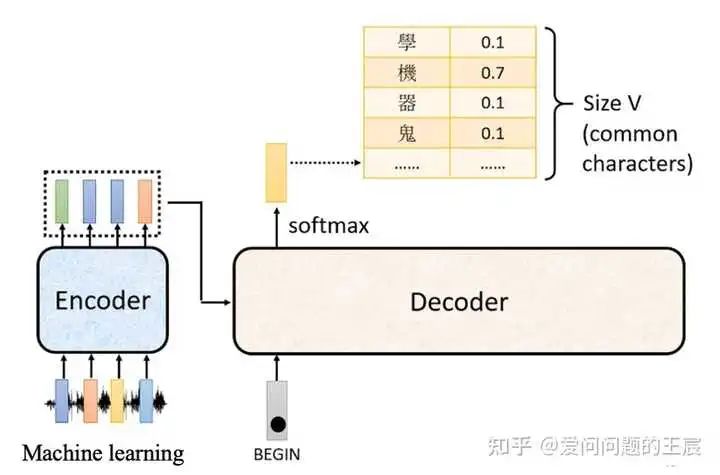
Linear + softmax:softmax是预测下一个词出现的概率,如图7所示,前面的Linear层类似于分类网络(ResNet18)最后分类层前接的MLP层。
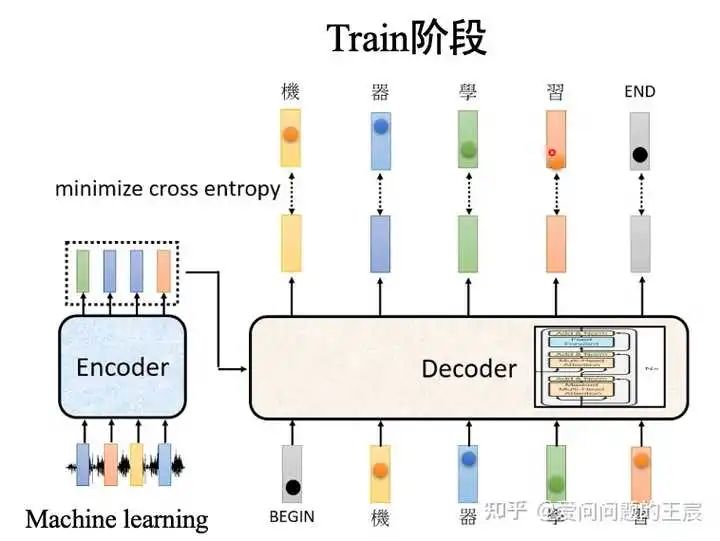
5.4 Transformer Decoder的输入、输出是什么?在Train和Test时是不同的。
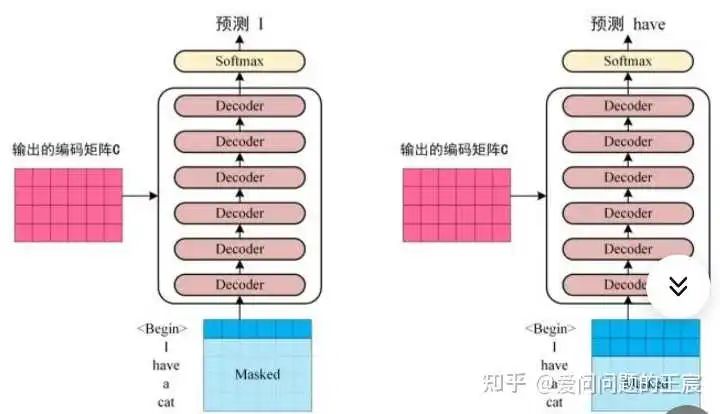
在Train阶段,如图8所示。这时是知道label的,decoder的第一个输入是begin字符,输出第一个向量与label中第一个字符使用cross entropy loss。Decoder的第二个输入是第一个向量的label,Decoder的第N个输入对应的输出是End字符,到此结束。这里也可以看到,在Train阶段是可以进行并行训练的。
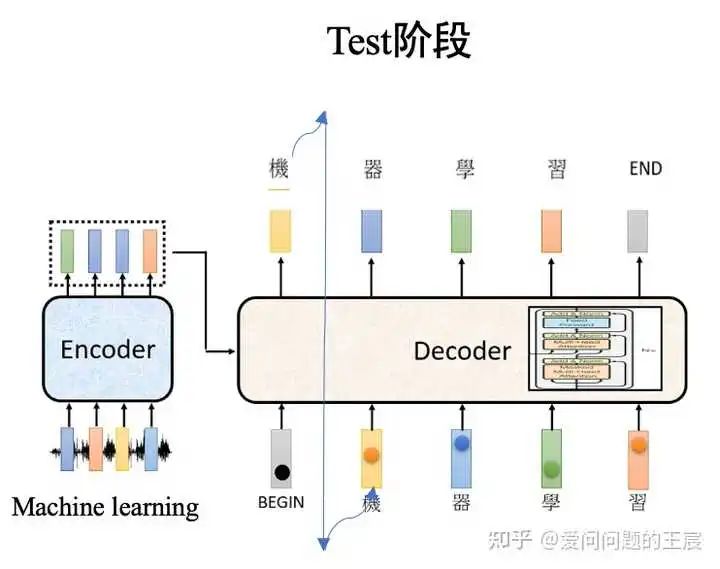
在Test阶段,下一个时刻的输入时是前一个时刻的输出,如图9所示。因此,Train和Test时候,Decoder的输入会出现Mismatch,在Test时候确实有可能会出现一步错,步步错的情况。有两种解决方案:一种是train时偶尔给一些错误,另一种是Scheduled sampling。
5.5 Transformer Decoder block内部的输出和输出是什么?
前面提到的是在整体train和test阶段,Decoder的输出和输出,那么Transformer Decoder内部的Transformer Decoder block,如图10所示,的输入输出又是什么呢?
对于N=6中的第1次循环(N=1时):子Decoder block1 的输入是 embedding +Positional Embedding,子Decoder block2 的输入的Q来自子Decoder block1的输出,KV来自Transformer Encoder最后一层的输出。
对于N=6的第2次循环:子Decoder block1的输入是N=1时,子Decoder block3的输出,KV同样来自Transformer Encoder的最后一层的输出。
总的来说,可以看到,无论在Train还是Test时,Transformer Decoder的输入不仅来自(ground truth或者上一个时刻Decoder的输出),还来自Transformer Encoder的最后一层。
训练时:第i个decoder的输入 = encoder输出 + ground truth embedding。
预测时:第i个decoder的输入 = encoder输出 + 第(i-1)个decoder输出.
6. Transformer Encoder和Transformer Decoder有哪些不同?
6.1 作用上,Transformer Encoder常用来提取特征,Transformer Decoder常用于生成式任务。Transformer Encoder和Transformer Decoder是两条不同的技术路线,Bert采用的前者,GPT系列模型采用的是后者。
6.2 结构上,Transformer Decoder block包括了3个子Decoder block,而Transformer Encoder block 包括2个子Encoder block,且Transformer Decoder中使用了Mask multi-head Attention。
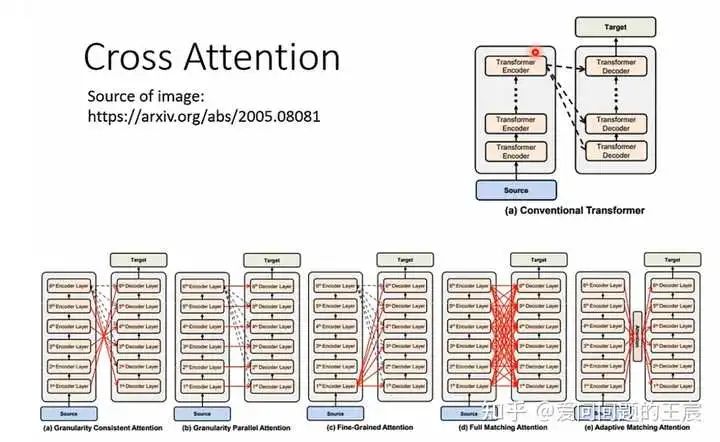
6.3 从二者的输入输出角度,N个Transformer Encoder运算完成之后,它的输出才正式输入进Transformer Decoder,作为QKV中的K和V,给Transformer Decoder使用。那么TransformerEncoder最后层的输出是如何送给Decoder呢?如图11所示。
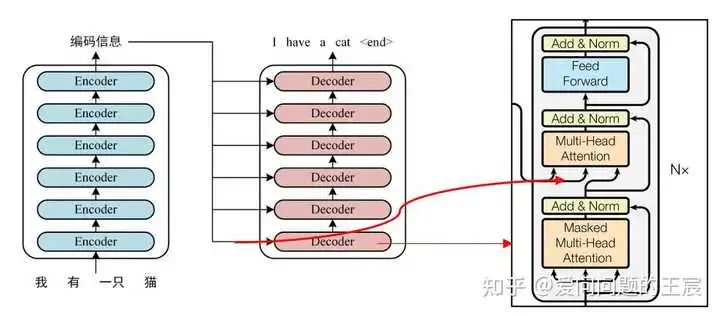
那么,为什么Encoder和Decoder必须要用这种交互的方式呢?其实也并不一定,后续有不同交互方式的提出,如图12。
7. 什么是Embedding?
7.1 Embedding在Transformer架构中的位置如图13所示。
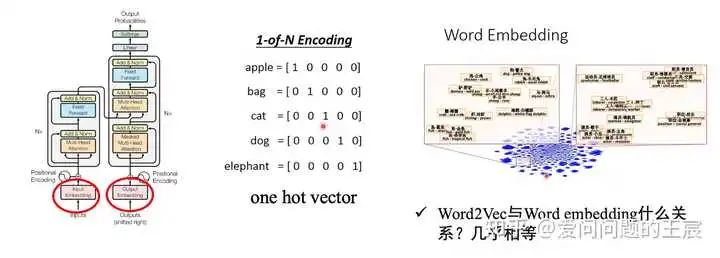
7.2 提出背景: 计算机无法直接处理一个单词或者一个汉字,需要把一个token转化成计算机可以识别的向量,这也就是embedding过程。
7.3 实现方式: 最简单的embedding操作就是one hot vector,但one hot vector有一个弊端就是没有考虑词语前后之间的关系,后来也就产生了WordEmbedding,如图13。
8. 什么是Positional Embedding?
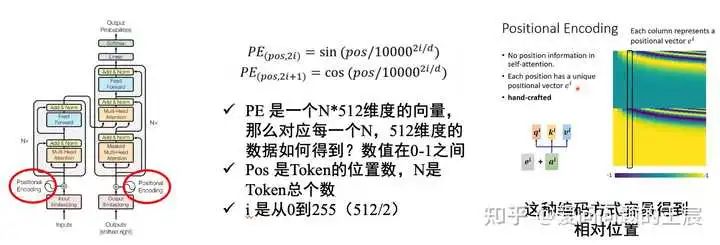
8.1 Positional Embedding在Transformer架构中的位置如图14所示。
8.2 提出背景: RNN作为特征提取器,是自带词的前后顺序信息的;而Attention机制并没有考虑先后顺序信息,但前后顺序信息对语义影响很大,因此需要通过Positional Embedding这种方式把前后位置信息加在输入的Embedding上。
8.3 实现方式: 传统位置编码和神经网络自动训练得到。
9. 什么是Attention?
9.1 介绍Transformer,为什么要介绍Attention呢?因为在Transformer中最多的multi head attention和Mask multi head attention来自Scaled dot product attention,而scaled dot product attention来自self attention,而self attention是attention的一种,因此首先需要了解Attention,如图15所示。

9.2 Attention到底是什么意思呢?
对于图像而言,attention就是人们看到图像中的核心关注的区域,是图像中的重点,如图16所示。对于序列而言,Attention机制本质上是为了找到输入中不同token之间的相互关系,通过权重矩阵来自发地找到词与词之间的关系。

9.3 Attention是如何实现的呢?
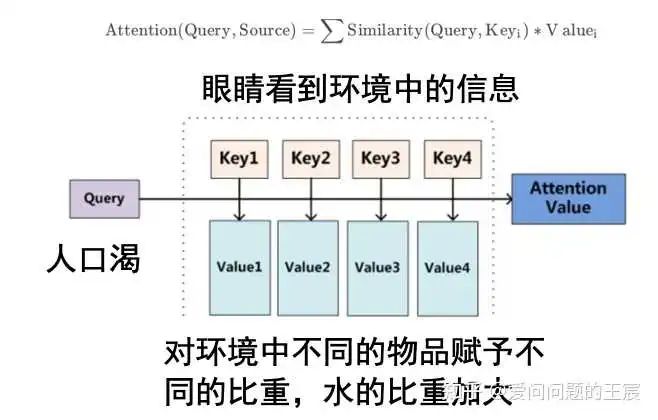
是通过QKV实现的。
那么什么是QKV呢?Q是query,K是keys,V是values。如图17所示,举例而言,Q是大脑发出的信号,我口渴了;K是环境信息,眼睛看到的世界;V是对环境中不同的物品赋予不同的比重,水的比重加大。
总之,Attention就是通过计算QK的相似度,与V相乘得到注意力数值。
9.4 为什么必须要有QKV三者?
为什么不是只有Q?因为Q1与Q2之间的关系权重,不止需要a12,也需要a21。你可能会问?我们让a12=a21不行吗?也可以尝试,但从原理上讲效果应该没有a12和a21效果好。
为什么不是只有QK?求得的权重系数需要放到输入中,可以乘Q,也可以乘K,为什么要重新乘V呢?我觉得可能是多了一组可训练参数WV,使网络具有更强的学习能力。
10. 什么是Self attention?
10.1 介绍Transformer,为什么要介绍self Attention呢?因为在Transformer中最多的multi head attention和Mask multi head attention来自Scaled dot product attention,而scaled dot product attention来自self attention,如图15所示。
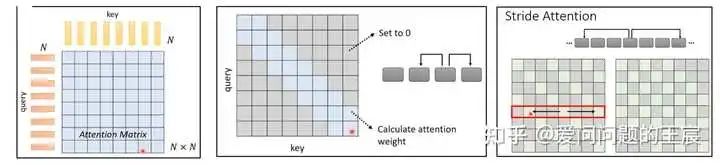
10.2 什么是self attention呢?self attention和local attention、stride attention都是attention的一种;self attention是每一个Q与每一个K依次计算注意力系数,如图18所示,而像local attention是Q只与相邻的K计算注意力系数,stride attention是Q通过跳连的方式与K计算注意力系数。
10.3 Self attention为什么可以用于处理像机器翻译这种序列数据?
输入序列中的每一个位置的数据,可以关注其他位置的信息,由此通过Attention score来提取特征或者捕获输入序列每一个token之间的关系。
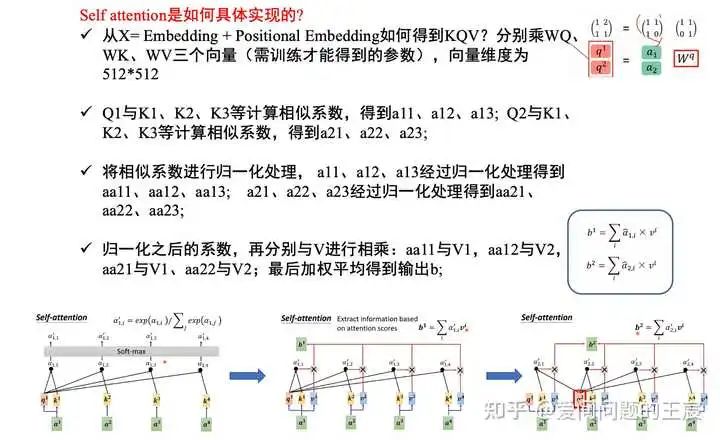
10.4 Self attention是如何具体实现的? 总共分为4步,如图19所示
11. 什么是Scaled dot product attention?
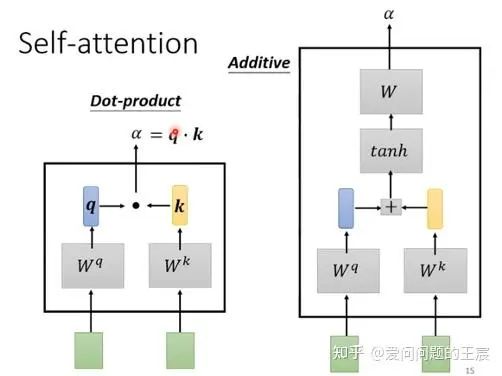
11.1 self attention最常见的有两种,一种是dot product attention、另一种是additive attention,如图20所示,前者的计算效率更高。
11.2 什么是Scaled ?
scaled的具体实现方式如图21所示,这一操作的目的是为了防止内积过大,从梯度角度考虑,避免靠近1,易训练;与batch normalization有一些相似的功能。

12. 什么是Multi head attention?
12.1 Multi head attention在Transformer架构中的位置如图15所示。
12.2 提出背景:CNN具有多个channel,可以提取图像不同维度的特征信息,那么Self attention是否可以有类似操作,可以提取不同距离token的多个维度信息呢?
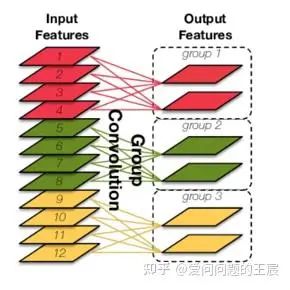
12.3 什么是group 卷积?如图22所示,将输入的特征多个channel分成几个group单独做卷积,最后再进行con c操作。
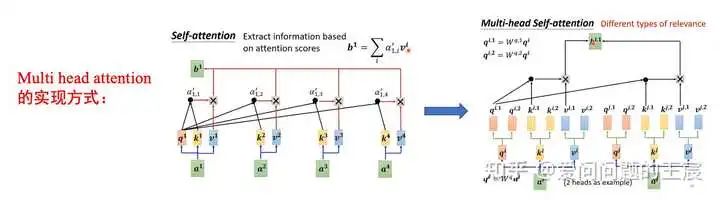
12.4 Multi head attention的实现方式?与self attention根本不同是什么?
如图23所示,以2个head的为例,将输入的Q、K、V分成两份,每一小份的Q与对应的K、V分别操作,最后计算得到的向量再进行conc操作,由此可以看出,Multi head attention与group卷积有着相似的实现方式。
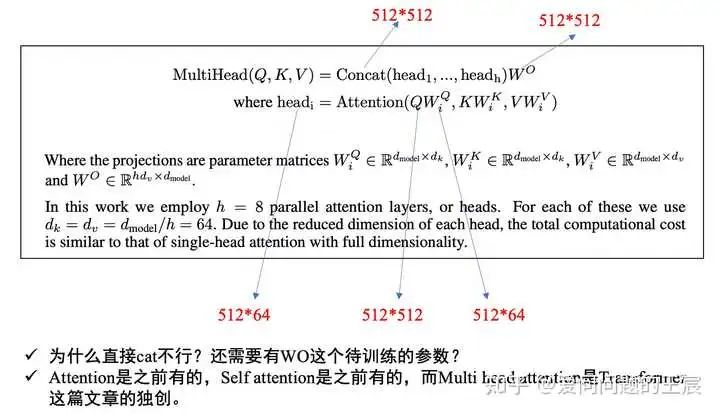
12.5 如何从输入输出维度,角度来理解Multi head attention?如图24所示。
13. 什么是Mask Multi head attention?
13.1 Mask Multi head attention在transformer架构中的位置如图15所示。
13.2 为什么要有Mask这种操作?
Transformer预测第T个时刻的输出,不能看到T时刻之后的那些输入,从而保证训练和预测一致。
通过 Masked 操作可以防止第 i 个单词知道 i+1 个单词之后的信息,如图25所示。
13.3 Mask操作是如何具体实现的呢?
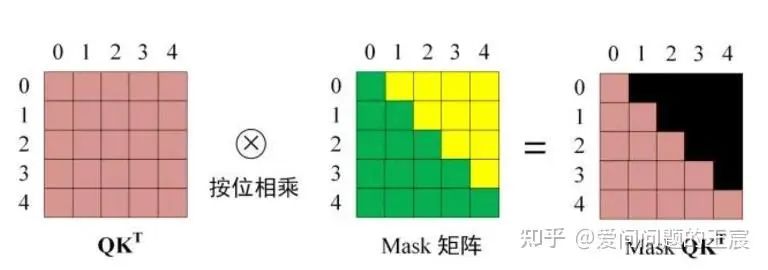
Q1只跟K1计算,Q2只跟K1、K2计算,而对于K3、K4等,在softmax之前给一个非常大的负数,由此经过softmax之后变为0,其在矩阵上的计算原理实现如图26所示。
14. 什么是ADD?
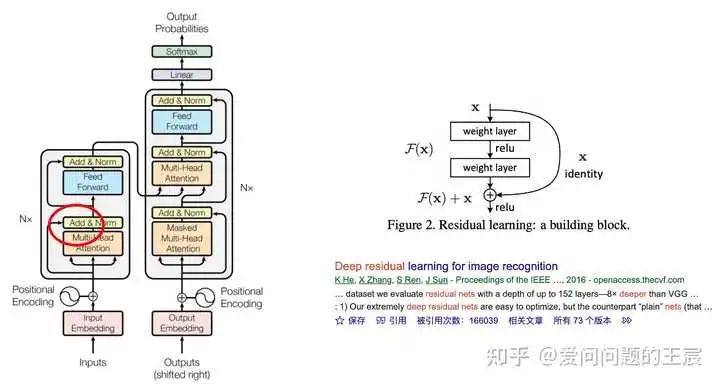
14.1 Add就是残差连接,由2015年ResNet这篇文章发扬光大(目前引用量已超过16万),与Skip connection的区别在于需要大小维度全部相同。
14.2 作为大道至简想法的极致,几乎每一个深度学习模型都会用到这个技术,可以防止网络退化,常用于解决多层网络难训练的问题。
15. 什么是Norm?
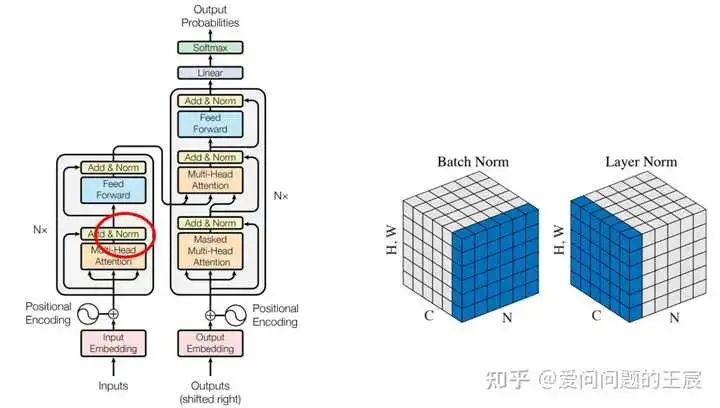
15.1 Norm就是layer normalization。
15.2 核心作用:为了训练更加稳定,和batch normalization有相同的作用,都是为了使输入的样本均值为零,方差为1。
15.3 为什么不使用batch normalization,使用的是layer normalization呢?因为一个时序数据,句子输入长度有长有短,如果使用batch normalization,则很容易造成因样本长短不一造成“训练不稳定”。BN是对同一个batch内的所有数据的同一个特征数据进行操作;而LN是对同一个样本进行操作。
16. 什么是FFN?
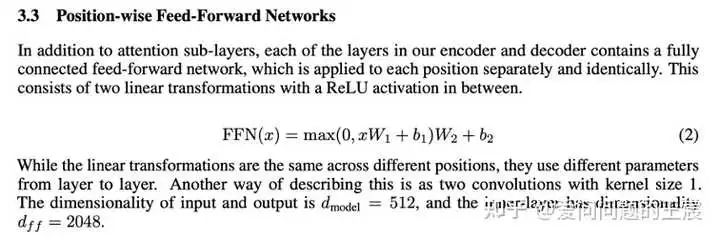
16.1 FFN就是feed forward networks。
16.2 为什么有了Self attention层,还要有FFN?Attention已经有了想要的序列信息特征,MLP的作用是把信息投影到特定的空间里,再做一次非线性映射,和Self attention交替使用。
16.3 结构上:包括两层MLP,第一层的维度为512*2048,第二层的维度为2048*512,且第二层MLP没有使用激活函数,如图29所示。
17. Transformer是如何训练出来的?
17.1 数据上,在Transformer论文中有提到,用到了4.5M和36M的翻译句子对。
17.2 硬件上,base模型是8个P100 GPU训练了12个小时,大模型是训练了3.5天。
17.3 模型参数和调参层面:
第一,可训练的参数包括WQ、WK、WV、WO,换包括FFN层的参数。
第二,可调的参数包括:每一个token向量表示的维度(d_model)、head的头数、Encoder和Decoder中block重复的次数N、FFN中间层向量的维度、Label smoothing(置信度0.1)和dropout(0.1)。
18. Transformer为什么效果好?
18.1 虽然题目是Attention is all you need,但后续一些研究表明,Attention、残差连接、layer normalization、FFN,这些因素共同成就了Transformer。
18.2 Transformer优点包括:
第一,提出深度学习既MLP、CNN、RNN后的第4大特征提取器。
第二,一开始用在机器翻译,随着GPT和Bert彻底出圈;是一个转折点,在这个点之后,NLP领域快速发展,之后多模态、大模型、视觉Transformer等开始兴起。
第三,给人们信心,原来CNN和RNN之后,还可以有效果更好的特征提取器。
18.3 Transformer的不足之处?
第一,计算量大,对硬件要求高。
第二,因为无归纳偏置,需要很多数据才可以取得很好的效果。
(一)视频课程来了!
自动驾驶之心为大家汇集了毫米波雷达视觉融合、高精地图、BEV感知、多传感器标定、传感器部署、自动驾驶协同感知、语义分割、自动驾驶仿真、L4感知、决策规划、轨迹预测等多个方向学习视频,欢迎大家自取(扫码进入学习)

(扫码学习最新视频)
视频官网:www.zdjszx.com
(二)国内首个自动驾驶学习社区
近1000人的交流社区,和20+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(分类、检测、分割、关键点、车道线、3D目标检测、Occpuancy、多传感器融合、目标跟踪、光流估计、轨迹预测)、自动驾驶定位建图(SLAM、高精地图)、自动驾驶规划控制、领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!

(三)【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多传感器融合、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向;

添加汽车人助理微信邀请入群
备注:学校/公司+方向+昵称