PID控制器是一种广泛用于各种工业控制场合的控制器,它结构简单,可以根据工程经验整定参数Kp,Ki,Kd. 虽然现在控制专家提出了很多智能的控制算法,比如神经网络,模糊控制等,但是PID仍然被广泛使用。常见的PID控制器有位置PID控制器,增量PID控制器。两个PID控制器各有自己的优点,需要根据具体的场合来使用。pid控制器的结构框图为:

连续形式公式如下:

为了方便软件编程实现,一般转换成离散形式,即用连加代替积分,有差分代替微分,

离散型PID公式:

理解PID(零)——什么是PID
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/443925.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

开源全文搜索(搜索引擎)
吃水不忘挖井人,介绍Doug Cutting大牛是十分有必要的。 最早,接触到搜索引擎,知道有个Nutch(开源搜索引擎),于是开始查看Nutch相关的资料,发现了Nutch的创始人Doug Cutting,随着项目…

初创公司首选HR软件推荐与功能解析
初创企业需HR软件自动化招聘、文书、日常任务及合规管理,提升效率。ZohoPeople是理想选择,性价比高,版本多样,满足不同需求。 1、简化招聘流程
您一直在寻找杰出的人才,以助您的初创企业飞跃发展。您选择的HR软件应该…

Python数字图像处理实战——基于OpenCV实现多种滤波器(附完整代码和结果图)
Python数字图像处理实战——基于OpenCV实现多种滤波器(附完整代码和结果图) 关于作者 作者:小白熊
作者简介:精通python、matlab、c#语言,擅长机器学习,深度学习,机器视觉,目标检测…
极客兔兔Gee-Cache Day7
protobuf配置: 从 Protobuf Releases 下载最先版本的发布包安装。解压后将解压路径下的 bin 目录 加入到环境变量即可。 如果能正常显示版本,则表示安装成功。 $ protoc --version
libprotoc 3.11.2在Golang中使用protobuf,还需要protoc-g…

LSTM时间序列模型实战——预测上证指数走势
LSTM时间序列模型实战——预测上证指数走势 关于作者 作者:小白熊
作者简介:精通python、matlab、c#语言,擅长机器学习,深度学习,机器视觉,目标检测,图像分类,姿态识别,…
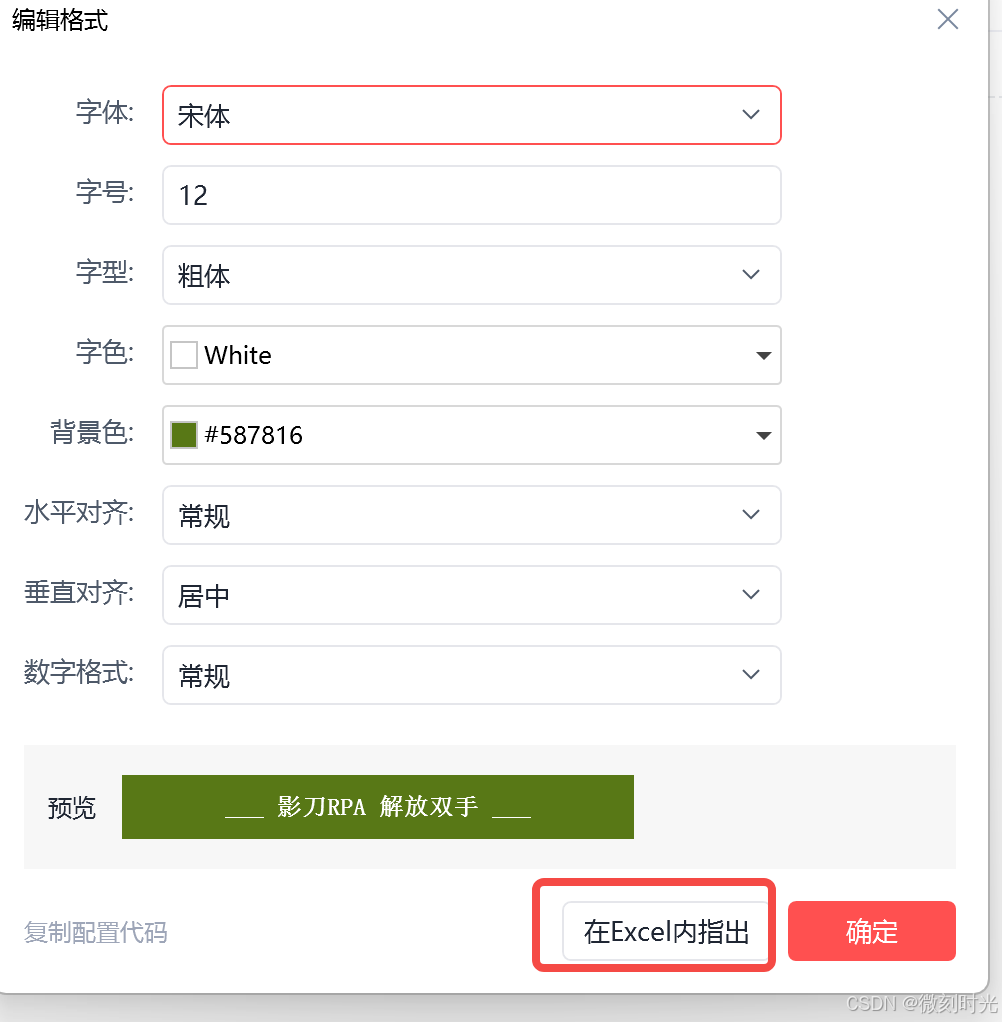
影刀RPA实战:Excel排序、替换与格式
1.实战目标
今天继续介绍影刀RPA操作Excel的指令,内容替换,数据排序与单元格格式设置,这几个功能在日常工作中使用率还是比较频繁的。我们可以使用影刀来处理这些重复繁琐的工作。 2.内容替换
我们手动替换内容时
打开Excel文件࿱…

鸿蒙进入“无人区”:该如何闯关?
按照华为方面的说法,“打造鸿蒙操作系统是三大战役,目前已经完成了底座和体验两大战役,第三大战役则是生态。”生态固然重要,但要让鸿蒙与当今世界主流操作系统抗衡,乃至成为新一代操作系统中的翘楚,其实还…

上市四天暴涨又暴跌,扫描全能王背后公司坐上“过山车”
股价四天涨五倍,遇到回调跌一半,扫描全能王母公司——合合信息,一上市就坐上了“过山车”。
合合信息其实早在2021年就向科创板申请上市,并在2023年成功过会,但直到9月13日才开启申购,IPO之路一走就是三年…

springboot-网站开发-thymeleaf引擎报错找不到指定的页面模板文件
springboot-网站开发-thymeleaf引擎报错找不到指定的页面模板文件! 这种错误的情况,发生,一般都是因为,我们自己的html模板文件,存档位置并不是在默认的templates下面。而是我们自己新建的一个子目录里面。然后&#x…

又被Transformer秀到了!结合小样本学习发A会!
在有限的数据资源下,为了训练出高性能的机器学习模型,我们常会考虑Transformer小样本学习。
这是因为Transformer能从有限的数据中提取更多有用的信息,这样与小样本学习结合,可以更有效的帮助我们提高模型的性能,加速…

Vue84 vue3项目结构分析
打开main.js文件,发现和vue2不同
//引入的不再是Vue构造函数了,引入的是一个名为createApp的工厂函数
import { createApp } from vue
import App from ./App.vue//创建应用实例对象——app(类似于之前Vue2中的vm,但app比vm更“轻”)
const …

Chrome(谷歌)浏览器 数据JSON格式美化 2024显示插件安装和使用
文章目录 目录 文章目录 安装流程 小结 概要安装流程技术细节小结 概要
没有美化的格式浏览器展示 美化之后效果图 安装流程
下载地址
https://github.com/gildas-lormeau/JSONVue
点击下载 下载成功,如图所示 解压文件 添加成功,如图所示 通过浏览器…

Python测试框架--Allure
严格意义上讲 Allure 不算是测试框架,但是它是生成漂亮测试报告的开源工具,搭配 Pytest 测试框架食用更搭。 也就是说 Allure 是在 Pytest 执行完生成的测试数据的基础上,对测试数据进行处理统计,生成格式统一、美观的测试报告。 …

C语言函数栈帧的创建与销毁(32)
文章目录 前言一、什么是函数栈帧?二、理解函数栈帧能解决什么问题?三、函数栈帧的创建和销毁解析什么是栈?认识相关寄存器和汇编指令 四、解析函数栈帧的创建和销毁预备知识函数的调用堆栈准备环境转到反汇编函数栈帧的创建函数栈帧的销毁 五…

FreeRTOS学习总结
背景:在裸机开发上,有时候我们需要等待某个信号或者需要延迟时,CPU的运算是白白浪费掉了的,CPU的利用率并不高,我们希望当一个函数在等待的时候,可以去执行其他内容,提高CPU的效率,同…

视频格式不支持播放怎么办?几招教你转换成mp4格式
视频已成为我们生活中不可或缺的一部分,无论是学习、娱乐还是工作交流,视频都扮演着重要角色。然而,在享受视频带来的便利时,我们时常会遇到一个令人头疼的问题——视频格式不支持播放。不同设备、平台和软件对视频格式的支持各不…

什么是组态软件?Web组态软件又是什么?
从事相关工作的对“组态软件”应该都不陌生,那Web组态软件又是什么呢?本文将对Web组态可视化软件(下称“Web组态软件”)做简单介绍,可视化编辑器是Web组态软件中的一个重要功能模块。除了编辑器,还有哪些功能模块?又…

leetcode---素数,最小质因子,最大公约数
1 判断一个数是不是质数(素数) 方法1:依次判断能否被n整除即可,能够整除则不是质数,否则是质数 方法2:假如n是合数,必然存在非1的两个约数p1和p2,其中p1<sqrt(n),p2>sqrt(n)。 方法3&…

医院管理新思维:Spring Boot技术应用
5系统详细实现 5.1 医生模块的实现 5.1.1 病床信息管理 医院管理系统的医生可以管理病床信息,可以对病床信息添加修改删除操作。具体界面的展示如图5.1所示。
图5.1 病床信息管理界面 5.1.2 药房信息管理 医生可以对药房信息进行添加,修改,…

Java中System类和RunTime类的Api
目录 System 类 1)out 2)err 3)in 4)currentTimeMillis() 5)nanoTime() 6)arraycopy(Object 要从里面复制东西的数组, int 要从里面复制东西数组的索引起始位置, Object 获得复制元素的数组, int 获得复制元素数组的起始索引, int 要复制东西的个数) 7)gc() 8)exit(int status)…
推荐文章