Python和C++通用步骤:
一、创建工作空间并初始化
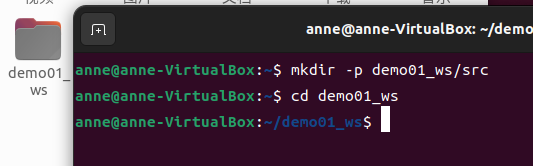
1、新建工作空间(work space)——使用终端(ctrl+alt+T)
mkdir -p 空间名称/src2、进入工作空间
cd 空间名称可以在文件里看到同步变化,并且demo01_ws文件夹里有子文件夹src
3、使用ros内置的编译命令
catkin_make目的是提供一个简单高效的方式来编译之后的代码。
二、创建功能包
cd 自定义空间名
cd src
catkin_create_pkg 自定义ROS包名 roscpp rospy std_msgs
//比如:catkin_create_pkg helloworld roscpp rospy std_msgs效果如下:
该功能包依赖于 roscpp、rospy 与 std_msgs,其中roscpp是使用C++实现的库,而rospy则是使用python实现的库,std_msgs是标准消息库,创建ROS功能包时,一般都会依赖这三个库实现。roscpp和rospy在优劣势上互补。C++运行效率高但因语法复杂导致编译效率低,Python与此相反,对性能和算法要求不高,旨在提高开发效率。如果想要设计一种复杂且注重运行效率的算法,则推荐使用C++(roscpp),相反如果想要开发一款对算法要求低的工具之类的则使用Python(rospy).工作中视需求而定。
三、编写并运行第一个程序:hello world
编写源文件
先进入功能包里的src,不是直属于工作空间的src:
cd demo01_ws(我的工作空间是demo01_ws)
cd src
cd helloworld(我的功能包叫helloworld)
然后左键,点击“打开终端”,输入下面命令
nano filename//会创建一个文本文件并且打开,自定义文本文件名,但为了区分一般以.cpp为后缀表示用C++写成的文件
//如nano helloworld_c.cpp//包含ros头文件
#include "ros/ros.h"
//编写程序入口
int main(int argc,char *argv[])
{//初始化ROS节点ros::init(argc,argv,"hello");//控制台输出Hello world,即输出日志ROS_INFO("Hello world!");return 0;
}
//请在英文输入法下输入括号等各种非中文字符修改配置文件
删除#
#add_executable(${PROJECT_NAME}_node src/helloworld_node.cpp)
#target_link_libraries(${PROJECT_NAME}_node
# ${catkin_LIBRARIES}
# )将上面的#删掉,就成了下面的这样:
![]()

修改名称
![]()
add_executable这个函数有两个参数需要我们修改:
①将上面的src/helloworld_node.cpp改成src/helloworld_c.cpp
②将${PROJECT_NAME}_node改成一个容易记的并且和我们程序有关的名,因为等一下要执行这个文件
就改成hw,其实就是我们源文件的代名词,我们用hw指代我们刚刚那么一长串的文件名,同样地下面的链接库也需要修改
所以最终是这样的:
add_executable(hw src/helloworld_c.cpp)
target_link_libraries(hw${catkin_LIBRARIES})编译
在工作空间中编译:
cd demo01_ws(我的工作空间是demo01_ws)输入并回车:
catkin_make成功的话会输出下面:
运行
再打开一个终端,输入:
roscore然后回到之前的终端(即回到我们的工作空间),输入:
source ./devel/setup.bash
最后运行:
rosrun helloworld(功能包名)hw(简化的C++节点名)运行结果:

总结
- 先创建一个工作空间;
- 再创建一个功能包;
- 编辑源文件;
- 编辑配置文件;
- 编译并执行。