Halcon相机外参自理解
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/462334.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

无人机螺旋桨动平衡分析测试台
产品简介
Flight Stand系列动力测试台全部支持螺旋桨动平衡分析测试功能,用户仅需几个简单的操作步骤,轻松实现电机和螺旋桨ISO 21940-11:2016标准级的动平衡精度。
功能说明
测试台一体化集成有三坐标振动传感器和转速传感器,通过测量动力…

qt QTextEdit详解
QTextEdit是Qt框架中的一个文本编辑控件类,它提供了丰富的功能用于编辑和显示纯文本以及富文本。 重要方法
setPlainText(const QString &text):设置纯文本内容。toPlainText():获取纯文本内容。setHtml(const QString &text)&#…

杂项——USB键盘与鼠标流量分析——BUUCTF——流量分析
第一次做USB键盘与鼠标流量分析的题目,现在来好好做一个总结
1. 基础知识
USB流量指的是USB设备接口的流量,攻击者能够通过监听usb接口流量获取键盘敲击键、鼠标移动与点击、存储设备的铭文传输通信、USB无线网卡网络传输内容等等。
在正式介绍 USB H…
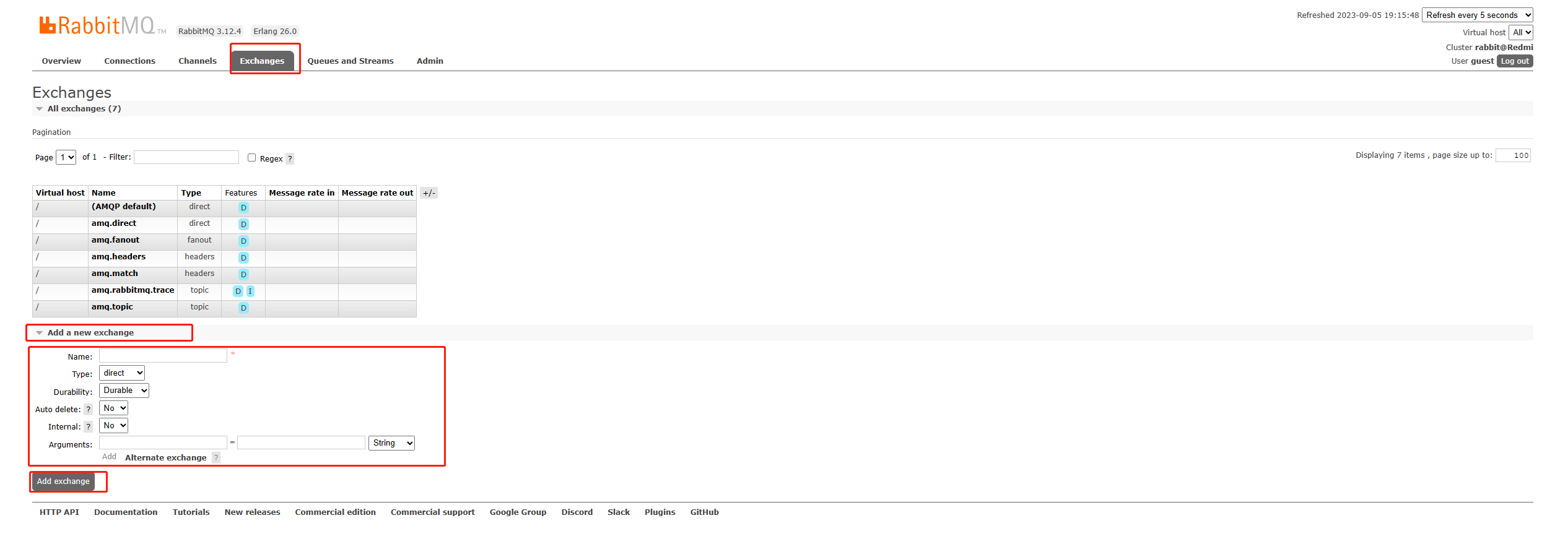
Windows部署rabbitmq
本次安装环境:
系统:Windows 11
软件建议版本:
erlang OPT 26.0.2rabbitmq 3.12.4
一、下载
1.1 下载erlang
官网下载地址: 1.2 下载rabbitmq
官网下载地址:
建议使用解压版,安装版可能会在安装软件…

HTML静态网页成品作业(HTML+CSS)——自行车介绍网页设计制作(1个页面)
🎉不定期分享源码,关注不丢失哦 文章目录 一、作品介绍二、作品演示三、代码目录四、网站代码HTML部分代码CSS部分代码 五、源码获取 一、作品介绍
🏷️本套采用HTMLCSS,未使用Javacsript代码,共有1个页面。
二、作品…

工厂电气及PLC【1章各种元件符号】
交流接触器的线圈通电后,线圈电流会产生磁场,衔铁在磁吸引力作用下带动触点动作:常开的主触点闭合,接通主电路;同时,常开的辅助触点闭合,常闭的辅助触点断开。当线圈失电或电压显著降低时&#…

使用GraphQL构建现代API
使用GraphQL构建现代API GraphQL简介 安装GraphQL 使用npm安装GraphQL 使用Yarn安装GraphQL 创建GraphQL服务器 定义Schema 编写Resolver 查询数据 变更数据 使用Apollo Client GraphQL订阅 数据验证 错误处理 分页查询 拆分和组合Schema 总结 随着API的发展,传统…

用Python设置、更新和获取Excel单元格的值
Excel工作簿作为一款广泛使用的数据管理工具,与Python相结合,可以使得自动化处理大量数据成为可能。通过Python来设置、更新以及读取Excel单元格的值,不仅可以极大地提高工作效率,减少重复劳动,还能增强数据处理流程的…

利用ChatGPT完成2024年MathorCup大数据挑战赛-赛道A初赛:台风预测与分析
利用ChatGPT完成2024年MathorCup大数据挑战赛-赛道A初赛:台风预测与分析 引言 在2024年MathorCup大数据挑战赛中,赛道A聚焦于气象数据分析,特别是台风的生成、路径预测、和降水风速特性等内容。本次比赛的任务主要是建立一个分类评价模型&…

Logback 常用配置详解
1. 配置文件解析
Logback 是 Spring Boot 默认使用的日志框架,Logback 配置主要包含 8 大元素 1.1 configuration
Logback 配置文件的根元素,它包含所有的配置信息
1.2 appender
定义一个 Appender,即日志输出的目的地,如控制…

造纸行业湿法粉碎机、高速破碎机、粉碎磨粉机
细胞磨在造纸行业的应用主要体现在以下几个方面:
1.原料处理
细碎与研磨:造纸行业的原料,如木材、竹材等,需要经过细碎和研磨处理以获取适合造纸的纤维。细胞磨能够高效地实现这一过程,将原料细化至所需的粒度&#…

JAVA基础:jdbc (学习笔记)
基础操作 任何一种jdbc操作,都是由7步完成的
手动加载数据库驱动类{反射}获得连接对象写sql语句获得执行对象执行sql语句,同时获得结果处理结果关闭资源 功能一:添加表里的数据 public static void main4(String[] args) throws ClassNotF…

RabbitMQ最全教程-Part1(基础使用)
一、消息队列基本概念
消息队列中间件是分布式系统中重要的组件,主要解决应用解耦,异步消息,流量削锋等问题,实现高性能,高可用,可伸缩和最终一致性架构
1、消息队列的特点
可靠性
消息持久化ÿ…
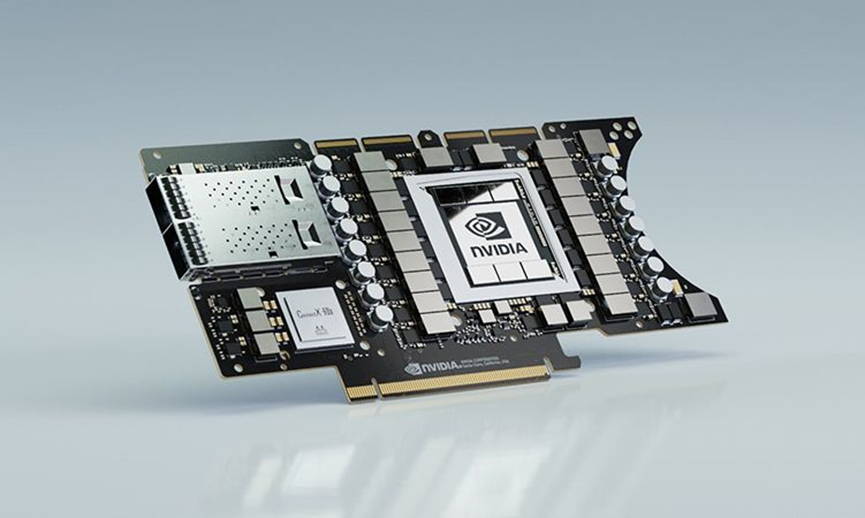
英伟达 GPU 架构:演进与模型推理速度的深度关联
英伟达的 GPU 架构演进之路充满了创新与突破。
©作者|Zane
来源|神州问学 一、 英伟达GPU的架构演进之路 1999 年,英伟达发布 Geforce256 图形处理芯片,首次提出 GPU 概念。早期的架构如 G80 或 GeForce 8800 GTX,包含 8 个 TPC&#…


实体类中为什么要实现serializable接口
最近见到好多项目中写的代码,在实体类中实现了Serializable接口。说实话:这个在以前学习的时候,貌似学过,但是一直没有用过,所以看着一脸懵逼,但是别人总不可能随便写的吧.....所以就去查了一下这个接口。 …

D55【python 接口自动化学习】- python基础之模块与标准库
day55 练习:实现求导
学习日期:20241101
学习目标:模块与标准库 -- 70 小试牛刀:如何使用Python为函数求导?
学习笔记:
需求分析 使用第三方模块实现函数求导 编写程序并测试 # 求导
from sympy import…
推荐一款功能强大的AI实时变声器:FliFlik Voice Changer
FliFlik VoiCE Changer是一款专注于声音变换与音频处理的创新软件,旨在满足从日常娱乐、游戏直播到播客制作、专业音频编辑的多种应用场景需求。无论是想在游戏中变换声音逗乐队友,还是在播客中塑造个性化的音效,这款软件都能提供灵活而强大的…

Spring Boot技术栈:打造大学城水电管理系统
2相关技术
2.1 MYSQL数据库 MySQL是一个真正的多用户、多线程SQL数据库服务器。 是基于SQL的客户/服务器模式的关系数据库管理系统,它的有点有有功能强大、使用简单、管理方便、安全可靠性高、运行速度快、多线程、跨平台性、完全网络化、稳定性等,非常…

2024 IC行业还能不能入了?
打个有趣的比方,18年以前入行IC的,就业前就知道或者就业后才知道,是去吃席只不过是“农村酒席”,但不至于吃坏肚子。对于这种阵仗,不是每个人都愿意去的,即便是在西电这样的院校,当年也有一些同…
推荐文章
- 一个程序员老总的年终总结2010版
- css的优先级排序?
- 经纬恒润二面三七互娱一面元象二面
- 目标检测算法——YOLOv5/YOLOv7改进之结合SOCA(单幅图像超分辨率)
- !大部分程序员只会写3年代码
- # 从浅入深 学习 SpringCloud 微服务架构(八)Sentinel(1)
- #systemverilog# 之 event region 和 timeslot 仿真调度(七)assign 赋值必在Active域调度?
- #深度学习:从基础到实践
- (10)(10.8) 固件下载
- (C++)只出现一次的数字I--异或
- (LdAiChat、Ai Loading、不墨AI助手、360AI搜索、TIG AI)分析好用的ChatGPT
- (避开网上复制操作)最详细的树莓派刷机配置(含IP固定、更改国内源的避坑操作、SSH网络登录、VNC远程桌面登录)