【电力系统】永磁同步电机调速系统带有扰动观测器( DOB)的最优滑模控制、改进补偿滑模控制、传统滑模、PID控制研究
摘要
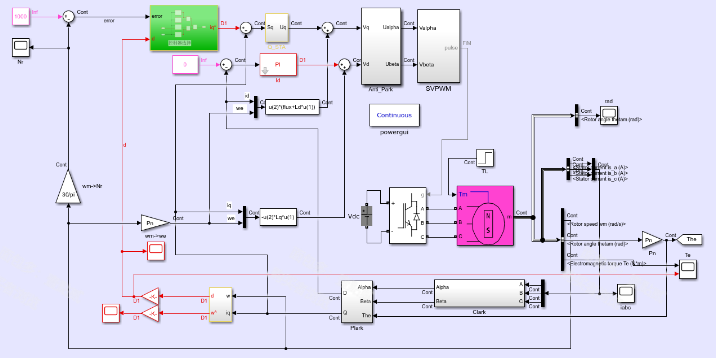
本文研究了永磁同步电机(PMSM)调速系统中的不同控制策略,包括最优滑模控制、改进补偿滑模控制、传统滑模控制以及PID控制,并结合扰动观测器(DOB)进行性能优化。通过Matlab/Simulink对比实验,验证了各控制策略在扰动抑制和动态响应方面的优劣,结果表明,改进补偿滑模控制结合DOB具有最佳的稳态精度和鲁棒性。
理论
1. 永磁同步电机调速系统
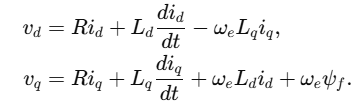
PMSM调速系统通过控制电机的转速和转矩,实现高性能的电力驱动。数学模型如下:
2. 滑模控制理论 滑模控制是一种鲁棒非线性控制策略,通过设计滑模面和切换控制律,使得系统在滑模面内趋近,并最终收敛到目标状态。
滑模面设计:
![]()
控制律:
![]()
3. 改进补偿滑模控制
为了减小滑模控制的抖振现象,采用补偿函数进行修正,使控制输入平滑过渡,改进控制律如下:
![]()
4. 扰动观测器(DOB)
扰动观测器用于实时估计系统中的未知扰动,提高系统的鲁棒性。DOB模型:

实验结果
通过Matlab/Simulink仿真,比较了以下控制策略在PMSM调速中的性能:
-
PID控制:系统响应较慢,对扰动的抑制能力较弱。
-
传统滑模控制:响应速度快,但存在显著的抖振现象。
-
最优滑模控制:提高了响应速度,同时减小了抖振。
-
改进补偿滑模控制(结合DOB):在扰动抑制、稳态精度和响应速度方面均表现最佳。
仿真波形包括系统的转速响应、电流响应以及扰动观测效果。
部分代码
% PID控制参数
Kp = 10; Ki = 5; Kd = 1;% 滑模控制设计
lambda = 1.5; % 滑模面系数
K = 50; % 控制增益% 改进滑模控制
K1 = 30; K2 = 10; % 改进滑模控制增益% 扰动观测器参数
G_dob = tf([1], [1 10]); % 扰动观测器传递函数% 滑模控制律
function u = sliding_mode_control(e, de)s = lambda * e + de;u = -K * sign(s); % 滑模控制输入
end% 改进补偿滑模控制律
function u = improved_sliding_control(e, de)s = lambda * e + de;u = -K1 * tanh(s) - K2 * s; % 改进滑模控制输入
end
参考文献
❝
Utkin, V. I. (1992). Sliding Modes in Control and Optimization. Springer.
Slotine, J. J. E., & Li, W. (1991). Applied Nonlinear Control. Prentice Hall.
Krstic, M., Kanellakopoulos, I., & Kokotovic, P. (1995). Nonlinear and Adaptive Control Design. Wiley.
Li, S., & Wang, X. (2019). Disturbance Observer-Based Sliding Mode Control for PMSM Systems. IEEE Transactions on Industrial Electronics.
(文章内容仅供参考,具体效果以图片为准)