目录…1
文摘…3
Abstract…3
第一章 绪论
1.1机械手概述…4
1.2机械手的组成和分类…4
1.2.1机械手的组成.
1.2.2机械手的分类
1.3国内外发展状况… …7
1.4课题的提出及主要任务………………………………………………8
1.4.1课题的提出
1.4.2课题的主要任务
第二章 机械手的设计方案
2.1机械手的座标型式与自由度……………………………………….10
2.2机械手的手部结构方案设计……………………………………….11
2.3机械手的手腕结构方案设计…………………………………………12
2.4机械手的手臂结构方案设计……………………………………….12
2.5机械手的驱动方案设计…………………………………………….12
2.6机械手的控制方案设计………………………………………………12
2.7机械手的主要参数……………………………………………………12
2.8机械手的技术参数列表……………………………………………12
第三章 手部结构设计
3.1夹持式手部结构…………………………………………………….14
3.1.1手指的形状和分类
3.1.2设计时考虑的几个问题
3.1.3手部夹紧气缸的设计
第四章 手腕结构设计
4.1手腕的自由度……………………………………………………….18
4.2手腕的驱动力矩的计算………………………………………………19
4.2.1手腕转动时所需的驱动力矩
4.2.2回转气缸的驱动力矩计算
4.2.3回转气缸的驱动力矩计算校核
第五章 手臂伸缩,升降,回转气缸的设计与校核
5.1手臂伸缩部分尺寸设计与校核………………………………………25
5.1.1尺寸设计
5.1.2尺寸校核
5 .1 .3导向装置
5 .1 .4平衡装置
5.2手臂升降部分尺寸设计与校核……………………………………26
5.2.1尺寸设计
5.2.2尺寸校核
5.3手臂回转部分尺寸设计与校核……………………………………27
5.3.1尺寸设计
5.3.2尺寸校核
第六章 气动系统设计
6.1气压传动系统工作原理图…………………………………………29
6.2气压传动系统工作原理图的参数化绘制…………………………30
第七章 机械手的PLC控制设计
7.1可编程序控制器的选择及工作过程……………………………….30
7.1.1可编程序控制器的选择
7.1.2可编程序控制器的工作过程
7.2可编程序控制器的使用步骤……………………………………….31
7.3机械手可编程序控制器控制方案……………………………………32
第八章 结论……………………………………………………………………36
致谢…………………………………………………………………………….37
参考文献
1.4课题的提出及主要任务
1.4.1课题的提出
进入21世纪,随着我国人口老龄化的提前到来,近来在东南沿海还出现在大量的缺工现象,迫切要求我们提高劳动生产率,降低工人的劳动强度,提高我国工业自动化水平势在必行,本设计的目的就是设计一个气动搬运机械手,应用于工业自动化生产线,把工业产品从一条生产线搬运到另外一条生产线,实现自动化生产,减轻产业工人大量的重复性劳动,同时又可以提高劳动生产率。。
现在的机械手大多采用液压传动,液压传动存在以下几个缺点:
(1)液压传动在工作过程中常有较多的能量损失(摩擦损失、泄露损失等):液压传动易泄漏,不仅污染工作场地,限制其应用范围,可能引起失火事故,而且影响执行部分的运动平稳性及正确性。
(2)工作时受温度变化影响较大。油温变化时,液体粘度变化,引起运动特性变化。
(3)因液压脉动和液体中混入空气,易产生噪声。
(4)为了减少泄漏,液压元件的制造工艺水平要求较高,故价格较高;且使用维护需要较高技术水平。鉴于以上这些缺陷,本机械手拟采用气压传动,
气动技术有以下优点:
(1)介质提取和处理方便。气压传动工作压力较低,工作介质提取容易,而后排入大气,处理方便,一般不需设置回收管道和容器:介质清洁,管道不易堵存在介质变质及补充的问题.
(2)阻力损失和泄漏较小,在压缩空气的输送过程中,阻力损失较小(一般不卜浇塞仅为油路的千分之一),空气便于集中供应和远距离输送。外泄漏不会像液压传动那样,造成压力明显降低和严重污染。
(3)动作迅速,反应灵敏。气动系统一般只需要0.02s-0.3s即可建立起所需的压力和速度。气动系统也能实现过载保护,便于自动控制。
(4)能源可储存。压缩空气可存贮在储气罐中,因此,发生突然断电等情况时,机器及其工艺流程不致突然中断。
(5)工作环境适应性好。在易燃、易爆、多尘埃、强磁、强辐射、振动等恶劣环境中,气压传动与控制系统比机械、电器及液压系统优越,而且不会因温度变化影响传动及控制性能。
(6)成本低廉。由于气动系统工作压力较低,因此降低了气动元、辅件的材质和加工精度要求,制造容易,成本较低。传统观点认为:由于气体具有可压缩性,因此,在气动伺服系统中要实现高精度定位比较困难(尤其在高速情况下,似乎更难想象)。此外气源工作压力较低,抓举力较小。虽然气动技术作为机器人中的驱动功能已有部分被工业界所接受,而且对于不太复杂的机械手,用气动元件组成的控制系统己被接受,但由于气动机器人这一体系己经取得的一系列重要进展过去介绍得不够,因此在工业自动化领域里,对气动机械手、气动机器人的实用性和前景存在不少疑虑。
1.4.2课题的主要任务
本课题将要完成的主要任务如下:
(1)机械手为通用机械手,因此相对于专用机械手来说,它的适用面相对较广.
(2)选取机械手的座标型式和自由度
(3)设计出机械手的各执行机构,包括:手部、手腕、手臂等部件的设计。为了使通用性更强,手部设计成可更换结构,不仅可以应用于夹持式手指来抓取棒料工件,在工业需要的时候还可以用气流负压式吸盘来吸取板料工件。
(4)气压传动系统的设计
本课题将设计出机械手的气压传动系统,包括气动元器件的选取,气动回路的设计,并绘出气动原理图。
(5)对气压传动系统原理图的参数化绘制进行研究,提高绘图效率,改善绘图质量。
(6)机械手的控制系统的设计
本机械手拟采用可编程序控制器(PLC)对机械手进行控制,本课题将要选取PLC型号,根据机械手的工作流程编制出PLC程序,并画出梯形图。
第二章 机械手的设计方案
对气动机械手的基本要求是能快速、准确地拾-放和搬运物件,这就要求它们具有高精度、快速反应、一定的承载能力、足够的工作空间和灵活的自由度及在任意位置都能自动定位等特性。设计气动机械手的原则是:充分分析作业对象(工件)的作业技术要求,拟定最合理的作业工序和工艺,并满足系统功能要求和环境条件;明确工件的结构形状和材料特性,定位精度要求,抓取、搬运时的受力特性、尺寸和质量参数等,从而进一步确定对机械手结构及运行控制的要求;尽量选用定型的标准组件,简化设计制造过程,兼顾通用性和专用性,并能实现柔性转换和编程控制.本次设计的机械手是通用气动上下料机械手,是一种适合于成批或中、小批生产的、可以改变动作程序的自动搬运或操作设备,动强度大和操作单调频繁的生产场合。它可用于操作环境恶劣,劳
2.1机械手的座标型式与自由度
按机械手手臂的不同运动形式及其组合情况,其座标型式可分为直角座标式、圆柱座标式、球座标式和关节式。由于本机械手在上下料时手臂具有升降、收缩及回转运动,因此,采用圆柱座标型式。相应的机械手具有三个自由度,为了弥补升降运动行程较小的缺点,增加手臂摆动机构,从而增加一个手臂上下摆动的自由度
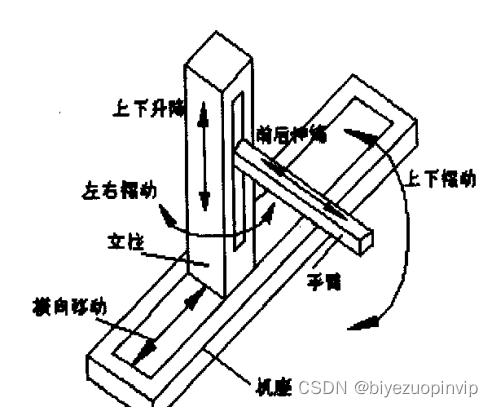

图2-1 机械手的运动示意图
Fia.2-1 Sketch Map of the Motion of Manipulator