ROS安装:
关于ROS的安装已经有很多好的博文供以参考,本文总结了一些安装过程中可能出现的报错情况已经解决方法。许多博文的教程步骤大差不差,建议是直接先按照官方步骤走,遇到问题再一步步解决。
ROS官方的参考链接:
http://wiki.ros.org/cn/noetic/Installation/Ubuntu![]() http://wiki.ros.org/cn/noetic/Installation/Ubuntu
http://wiki.ros.org/cn/noetic/Installation/Ubuntu
1、设置ROS下载源:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
如果下载很慢的话可以尝试一下替换成清华镜像源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' 如果还是有链接不上的问题,可以参考这篇文章替换阿里源:ubuntu镜像_ubuntu下载地址_ubuntu安装教程-阿里巴巴开源镜像站 (aliyun.com)![]() https://developer.aliyun.com/mirror/ubuntu
https://developer.aliyun.com/mirror/ubuntu
2、设置密钥
在终端输入:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654设置成功会显示如下
因为我已经设置过秘钥了所以显示未改变,第一次输入的话会显示已导入
3、开始安装ROS
3.1 更新软件包索引
sudo apt update完成后会显示:
3.3 安装 ROS完整桌面版
sudo apt install ros-noetic-desktop-full 这里我的ubuntu版本是20.04对应的ROS版本为noetic,其他ubuntu发行版本的只要更改这个版本号为当前ubuntu版本对应的ROS版本即可, 参考博文:https://blog.csdn.net/maizousidemao/article/details/119846292![]() https://blog.csdn.net/maizousidemao/article/details/119846292
https://blog.csdn.net/maizousidemao/article/details/119846292
4、初始化和更新rosdep
sudo rosdep initrosdep update关于这两步报错的概率非常之大,归根结底是网络连接的问题,总结了几篇博文的解决方法:
使用国内镜像rosdepc,最为便捷的一种:https://blog.csdn.net/qq_47997583/article/details/122517228?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522169025552716800192228206%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=169025552716800192228206&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~top_click~default-8-122517228-null-null.142^v91^insert_down28v1,239^v3^insert_chatgpt&utm_term=ros%E5%AE%89%E8%A3%85&spm=1018.2226.3001.4187![]() https://blog.csdn.net/qq_47997583/article/details/122517228?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522169025552716800192228206%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=169025552716800192228206&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~top_click~default-8-122517228-null-null.142^v91^insert_down28v1,239^v3^insert_chatgpt&utm_term=ros%E5%AE%89%E8%A3%85&spm=1018.2226.3001.4187
https://blog.csdn.net/qq_47997583/article/details/122517228?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522169025552716800192228206%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=169025552716800192228206&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~top_click~default-8-122517228-null-null.142^v91^insert_down28v1,239^v3^insert_chatgpt&utm_term=ros%E5%AE%89%E8%A3%85&spm=1018.2226.3001.4187
不使用国内镜像的其他的一些解决方法:
https://blog.csdn.net/KIK9973/article/details/118755045?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522169025552716800192228206%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=169025552716800192228206&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~top_positive~default-2-118755045-null-null.142^v91^insert_down28v1,239^v3^insert_chatgpt&utm_term=ros%E5%AE%89%E8%A3%85&spm=1018.2226.3001.4187![]() https://blog.csdn.net/KIK9973/article/details/118755045?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522169025552716800192228206%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=169025552716800192228206&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~top_positive~default-2-118755045-null-null.142^v91^insert_down28v1,239^v3^insert_chatgpt&utm_term=ros%E5%AE%89%E8%A3%85&spm=1018.2226.3001.4187https://blog.csdn.net/qq_44339029/article/details/108919545?spm=1001.2014.3001.5502
https://blog.csdn.net/KIK9973/article/details/118755045?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522169025552716800192228206%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=169025552716800192228206&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~top_positive~default-2-118755045-null-null.142^v91^insert_down28v1,239^v3^insert_chatgpt&utm_term=ros%E5%AE%89%E8%A3%85&spm=1018.2226.3001.4187https://blog.csdn.net/qq_44339029/article/details/108919545?spm=1001.2014.3001.5502![]() https://blog.csdn.net/qq_44339029/article/details/108919545?spm=1001.2014.3001.5502
https://blog.csdn.net/qq_44339029/article/details/108919545?spm=1001.2014.3001.5502
5、验证ROS环境
设置环境变量:
打开新终端输入
gedit .bashrc在最下面输入
source /opt/ros/noetic/setup.bash
ctrl+s保存关闭,在终端输入
source ~/.bashrc
打开新终端输入
roscoreros安装成功会正常运行
再打开一个新终端,输入
rosrun turtlesim turtlesim_node再打开一个新终端,输入
rosrun turtlesim turtle_teleop_key在输入turtle_teleop_key这个终端中按键盘上的上下左右就可以控制小海龟运动了
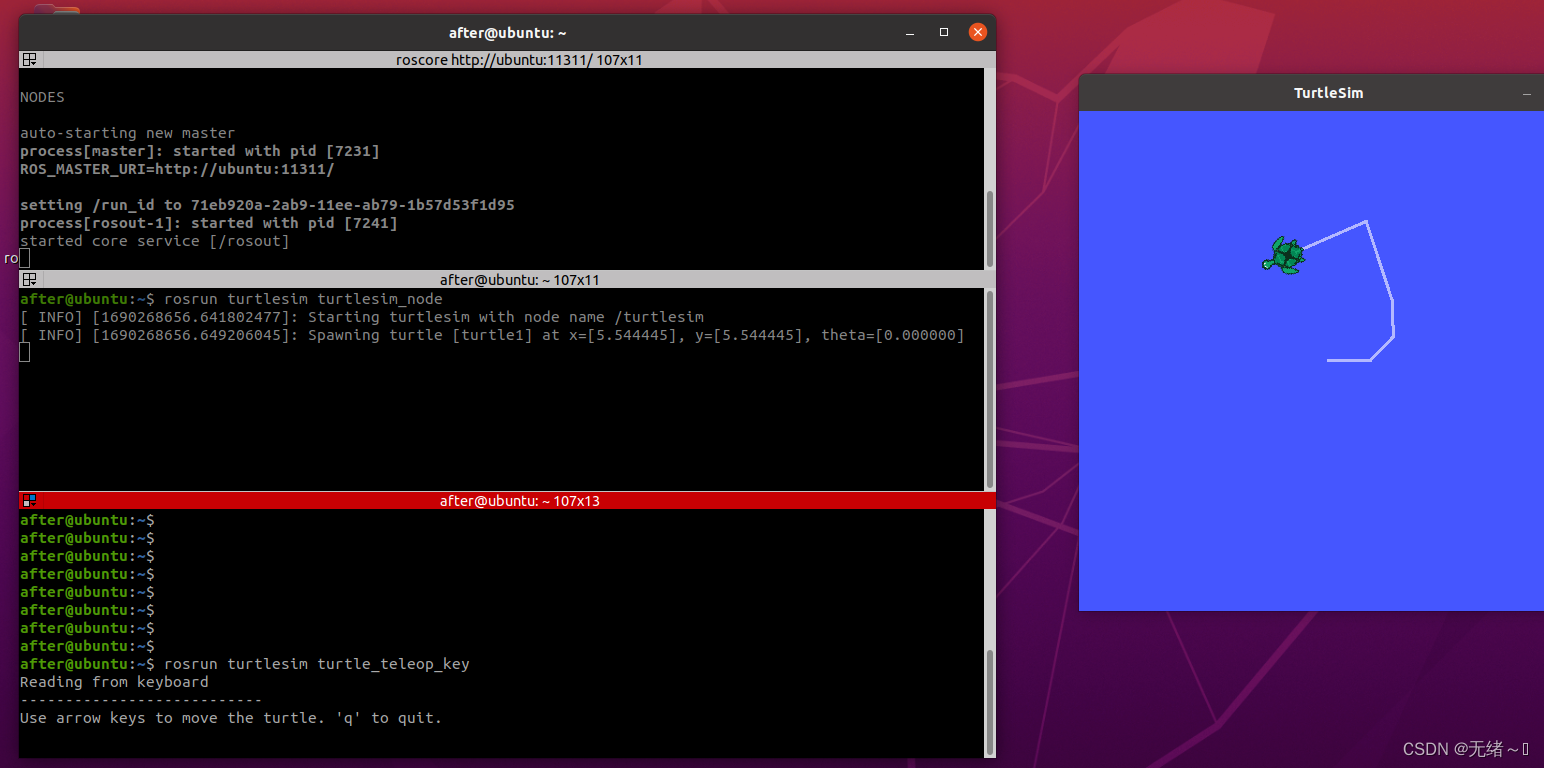
至此ROS环境安装完成


![[科研神器]如何让ChatPDF帮你日读文献300篇](https://img-blog.csdnimg.cn/66e83634e6ed40cb8dd7df2cdd5dd77f.png)