文章目录
- 第02章 Pytorch基础知识
- 2.1 张量
- 2.2 自动求导
- 2.3 并行计算简介
- 2.3.1 为什么要做并行计算
- 2.3.2 CUDA是个啥
- 2.3.3 做并行的方法
- 补充:通过股票数据感受张量概念。
本图文是Datawhale组队学习Pytorch的学习笔记,主要内容包括张量的概念(0维、1维、2维、3维、4维张量等等),自动求导的原理(通过动态图进行理解),以及对并行的理解。
第02章 Pytorch基础知识
2.1 张量
本章我们开始介绍Pytorch基础知识,我们从张量说起,建立起对数据的描述,再介绍张量的运算,最后再讲 PyTorch 中所有神经网络的核心包 autograd,也就是自动微分,了解完这些内容我们就可以较好地理解 PyTorch 代码了。下面我们开始吧~
简介
几何代数中定义的张量是基于标量、向量和矩阵的推广,比如我们可以将标量视为0维张量,向量可以视为1维张量,矩阵就是2维张量。
- 0 维张量/标量:标量是一个数字。如
1。 - 1 维张量/向量:如
[1,2,3]。 - 2 维张量/矩阵:如
[[1,2,3],[4,5,6]]。 - 3 维张量:如
[[[1, 4, 7], [2, 5, 8]],[[1, 2, 3], [4, 5, 6]]]。
张量是现代机器学习的基础。它的核心是一个数据容器,多数情况下,它包含数字,有时候它也包含字符串,但这种情况比较少。因此可以把它想象成一个数字的水桶。
机器学习(深度学习) 中用到的数据,包括结构性数据 (数据表、序列) 和非结构性数据(图片、视屏)都是张量,总结如下:
- 数据表:2 维,形状 = (样本数,特征数)
- 序列类:3 维,形状 = (样本数,步长,特征数)
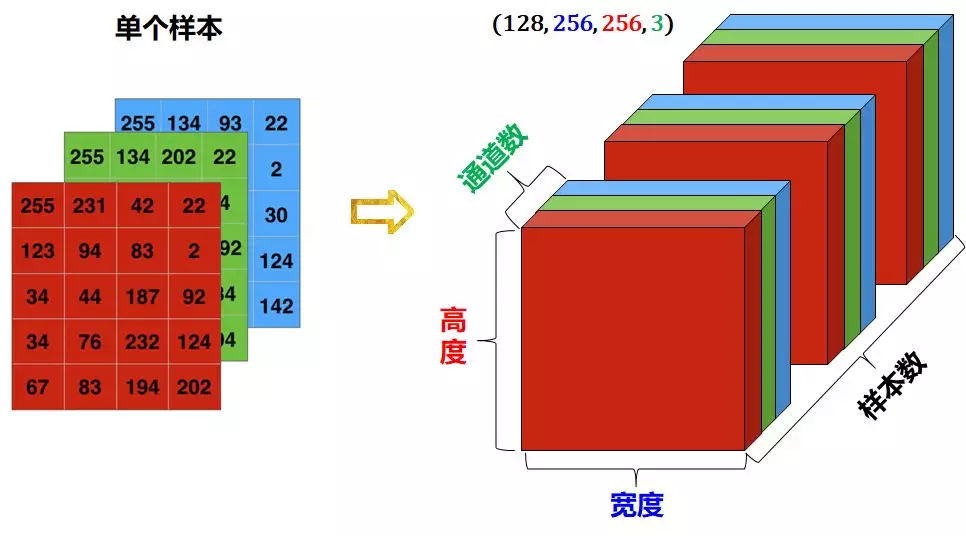
- 图像类:4 维,形状 = (样本数,宽,高,通道数)
- 视屏类:5 维,形状 = (样本数,帧数,宽,高,通道数)
机器学习,尤其深度学习,需要大量的数据,因此样本数肯定占一个维度,惯例我们把它称为维度 1。这样机器学习要处理的张量至少从 2 维开始。
2 维张量就是矩阵,也叫数据表,一般用 csv 存储。

这套表格 21,000 个数据,包括:其价格 (y),平方英尺,卧室数,楼层,日期,翻新年份等等 21 栏。该数据形状为 (21000, 21)。传统机器学习的线性回归可以来预测房价。
2 维张量的数据表示图如下:

3 维序列数据
推特 (twitter) 的每条推文 (tweet) 规定只能发 280 个字符。在编码推文时,将 280 个字符的序列用独热编码 (one-hot encoding) 到包含 128 个字符的 ASCII 表,如下所示。

这样,每条推文都可以编码为 2 维张量,形状 (280, 128),比如一条 tweet 是 “I love python 😃”,这句话映射到 ASCII 表变成:
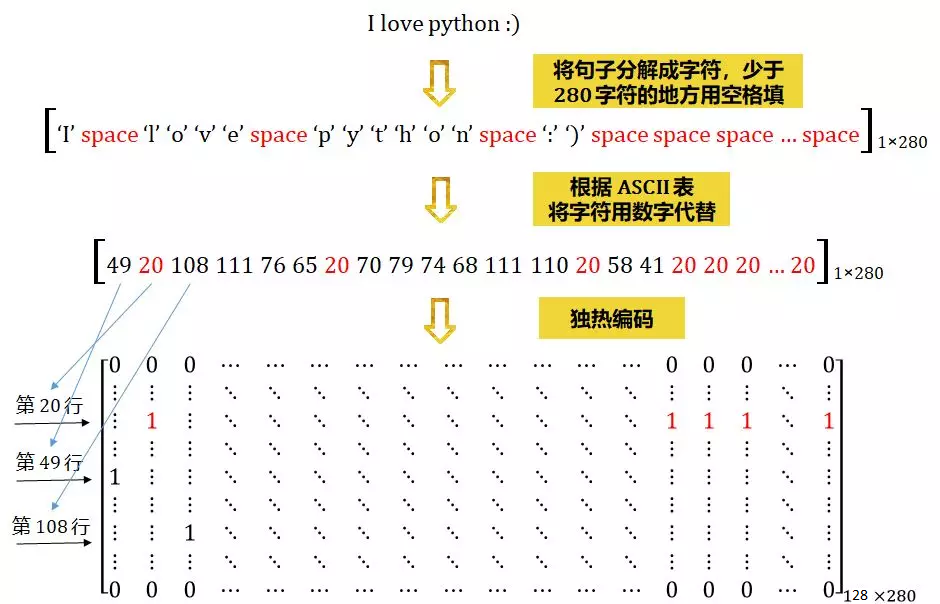
如果收集到 1 百万条推文,那么整个数据集的形状为 (1000000, 280, 128)。传统机器学习的对率回归可以来做情感分析。
3 维张量的数据表示图如下:

?- 3维=时间序列公用数据存储在张量 时间序列数据 股价 文本数据
4维 图像数据
图像通常具有3个维度:宽度,高度和颜色通道。虽然是黑白图像 (如 MNIST 数字) 只有一个颜色通道,按照惯例,我们还是把它当成 3 维,即颜色通道只有一维。
- 一组黑白照片可存成形状为 (样本数,宽,高,1) 的 4 维张量
- 一组彩色照片可存成形状为 (样本数,宽,高,3) 的 4 维张量

通常 0 代表黑色,255 代表白色。
4 维张量的数据表示图如下:
5维 视频数据
视频可以被分解成一幅幅帧 (frame)。
- 每幅帧就是彩色图像,可以存储在形状是 (宽度,高度,通道) 的 3D 张量中
- 视屏 (一个序列的帧) 可以存储在形状是 (帧数,宽度,高度,通道) 的 4D 张量中
- 一批不同的视频可以存储在形状是 (样本数,帧数,宽度,高度,通道) 的 5D 张量中
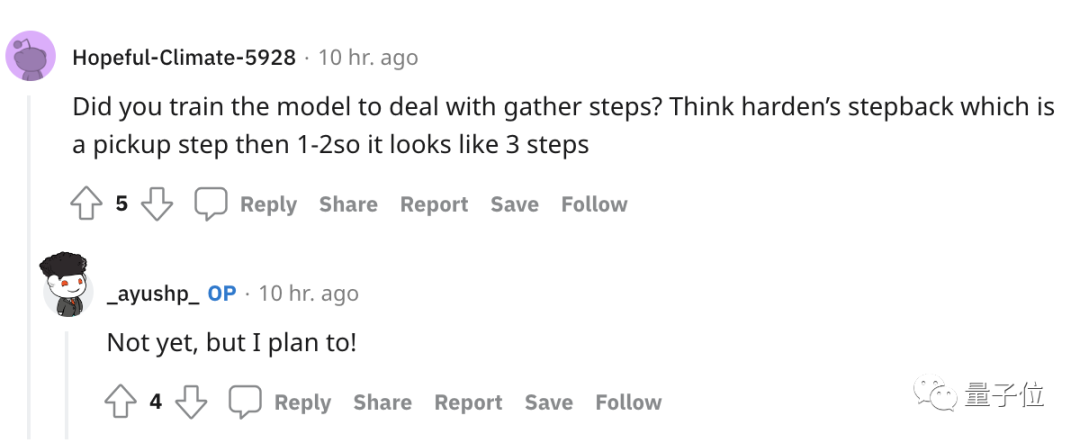
下面一个 9:42 秒的 1280x720 YouTube 视频 (哈登三分绝杀勇士),被分解成 40 个样本数据,每个样本包括 240 帧。这样的视频剪辑将存储在形状为 (40, 240, 1280, 720, 3) 的张量中。

5 维张量的数据表示图如下:

张量可以看成多维数组,下面用 Python 的numpy来定义张量。
import numpy as np# 0维张量 ()
x0 = np.array(28)# 1维张量 (3,)
x1 = np.array([1,2,3])# 2维张量 (2, 3)
x2=np.array([[1,2,3],[4,5,6]])# 3维张量 (3, 3, 4)
x3 = np.array([[[1, 4, 7, 3], [2, 5, 8, 5], [3, 6, 9, 4]],[[1, 2, 3, 4], [4, 5, 6, 3], [7, 8, 9, 5]],[[9, 8, 7, 5], [6, 5, 4, 4], [3, 2, 1, 3]]])# 4维张量 (2, 5, 4, 3)
x4 = np.ones((2,5,4,3))
不难看出:
- x0, x1, x2, x3 都是用
np.array直接设定张量里的元素来定义张量。 - X4 用
np.ones和张量的形状(2,5,4,3)来定义一个所有元素都是 1 的张量
在 PyTorch中,torch.Tensor是存储和变换数据的主要工具。如果你之前用过NumPy,你会发现Tensor和NumPy的多维数组非常类似。然而,Tensor提供GPU计算和自动求梯度等更多功能,这些使 Tensor 这一数据类型更加适合深度学习。
from __future__ import print_function
import torch
张量的操作主要包括张量的结构操作和张量的数学运算操作。
- Tensor的结构操作包括:创建张量,查看属性,修改形状,指定设备,数据转换, 索引切片,广播机制,元素操作,归并操作;
- Tensor的数学运算包括:标量运算,向量运算,矩阵操作,比较操作;
创建tensor
# (0维张量)x = torch.tensor(2)
print(x, x.shape, x.type())
# tensor(2) torch.Size([]) torch.LongTensory = torch.Tensor(2)
print(y, y.shape, y.type())
# tensor([0., 0.]) torch.Size([2]) torch.FloatTensor
注意到了torch.tensor与torch.Tensor的区别没?一字之差,结果差别却很大。
- torch.tensor(2) 返回常量2,数据类型从数据推断而来,其中的2表示的是数据值。
- torch.Tensor(2) 使用全局默认 dtype(FloatTensor),返回一个size为2的向量,初值为 0;
直接使用数据,构造一个张量:
# 1维度张量x = torch.tensor([5.5, 3])
print(x, x.shape, x.type())# tensor([5.5000, 3.0000]) torch.Size([2]) torch.FloatTensor
构造一个随机初始化的矩阵:
# 2维向量torch.manual_seed(20211013)
x = torch.rand([4, 3])
print(x, x.shape, x.type())# tensor([[0.4786, 0.4584, 0.2201],
# [0.5064, 0.5879, 0.9110],
# [0.8603, 0.5285, 0.0871],
# [0.8849, 0.4521, 0.3099]]) torch.Size([4, 3]) torch.FloatTensor
构造一个矩阵全为 0,而且数据类型是 long。
# 2维向量x = torch.zeros([4,3],dtype=torch.long)
print(x)# tensor([[0, 0, 0],
# [0, 0, 0],
# [0, 0, 0],
# [0, 0, 0]])
基于已经存在的 tensor,创建一个 tensor :
x = torch.tensor([5.5, 3])
x = x.new_ones([4,3])
print(x,x.type())# tensor([[1., 1., 1.],
# [1., 1., 1.],
# [1., 1., 1.],
# [1., 1., 1.]], dtype=torch.float64)# 创建一个新的tensor,返回的tensor默认具有相同的 torch.dtype和torch.device
# 也可以像之前的写法 x = torch.ones(4, 3, dtype=torch.double)x = torch.ones([4,3],dtype=torch.double)
print(x)# tensor([[1., 1., 1.],
# [1., 1., 1.],
# [1., 1., 1.],
# [1., 1., 1.]], dtype=torch.float64)x = torch.rand_like(x,dtype=torch.float)
# 重置数据类型print(x)
# 结果会有一样的size
# tensor([[0.5162, 0.1575, 0.3045],
# [0.8349, 0.5412, 0.5001],
# [0.8255, 0.7037, 0.3061],
# [0.4699, 0.6661, 0.0216]])
获取它的维度等属性信息:
- tensor.shape,tensor.size(): 返回张量的形状;
- tensor.ndim:查看张量的维度;
- tensor.dtype,tensor.type():查看张量的数据类型;
- tensor.is_cuda:查看张量是否在GPU上;
- tensor.grad:查看张量的梯度;
- tensor.requires_grad:查看张量是否可微。
torch.manual_seed(20211013)
x = torch.rand([4, 3])
print("形状: ", x.shape, x.size())
print("维度: ", x.ndim)
print("类型: ", x.dtype, x.type())
print("cuda: ", x.is_cuda)
print("梯度: ", x.grad)
print("是否可微: ", x.requires_grad)# 形状: torch.Size([4, 3]) torch.Size([4, 3])
# 维度: 2
# 类型: torch.float32 torch.FloatTensor
# cuda: False
# 梯度: None
# 是否可微: False
还有一些常见的构造Tensor的函数:
| 函数 | 功能 |
|---|---|
| Tensor(*sizes) | 基础构造函数。 直接从参数构建一个张量,支持List,Numpy数组。 |
| tensor(data) | 类似于np.array |
| ones(*sizes) | 指定shape,生成元素全1的数据。 |
| zeros(*sizes) | 指定shape,生成元素全0的数据。 |
| eye(*sizes) | 对角为1,其余为0。 指定(行列)数,创建二维单位Tensor。 |
| arange(s,e,step) | 从s到e,步长为step生成一个序列张量。 |
| linspace(s,e,steps) | 从s到e,均匀分成step份。 |
| logspace(s,e,steps) | 从10^s 到 10^e,均匀分成steps份。 |
| rand/randn(*sizes) | 生成[0,1]均匀分布和标准正态分布数据。 |
| normal(mean,std)/uniform(from,to) | 正态分布/均匀分布 |
| randperm(m) | 随机排列 |
操作
一些加法操作:
torch.manual_seed(20211013)
x = torch.rand([4, 3])
y = torch.ones([4, 3])
print(x)
# tensor([[0.4786, 0.4584, 0.2201],
# [0.5064, 0.5879, 0.9110],
# [0.8603, 0.5285, 0.0871],
# [0.8849, 0.4521, 0.3099]])# 方式1
print(x + y)
# tensor([[1.4786, 1.4584, 1.2201],
# [1.5064, 1.5879, 1.9110],
# [1.8603, 1.5285, 1.0871],
# [1.8849, 1.4521, 1.3099]])# 方式2
print(torch.add(x, y))
# tensor([[1.4786, 1.4584, 1.2201],
# [1.5064, 1.5879, 1.9110],
# [1.8603, 1.5285, 1.0871],
# [1.8849, 1.4521, 1.3099]])# 方式3 提供一个输出 tensor 作为参数
result = torch.empty([4, 3])
torch.add(x, y, out=result)
print(result)
# tensor([[1.4786, 1.4584, 1.2201],
# [1.5064, 1.5879, 1.9110],
# [1.8603, 1.5285, 1.0871],
# [1.8849, 1.4521, 1.3099]])# 方式4 in-place
y.add_(x)
print(y)
# tensor([[1.4786, 1.4584, 1.2201],
# [1.5064, 1.5879, 1.9110],
# [1.8603, 1.5285, 1.0871],
# [1.8849, 1.4521, 1.3099]])
索引操作:(类似于numpy)
需要注意的是:索引出来的结果与原数据共享内存,也即修改一个,另一个会跟着修改。
torch.manual_seed(20211013)
x = torch.rand([4, 3])
print(x)
# tensor([[0.4786, 0.4584, 0.2201],
# [0.5064, 0.5879, 0.9110],
# [0.8603, 0.5285, 0.0871],
# [0.8849, 0.4521, 0.3099]])# 取第二列
print(x[:, 1])
# tensor([0.4584, 0.5879, 0.5285, 0.4521])
y = x[0, :]
y += 1
print(y)
# tensor([1.4786, 1.4584, 1.2201])print(x[0, :])
# tensor([1.4786, 1.4584, 1.2201]) # 源tensor也被改了了
改变大小:如果你想改变一个 tensor 的大小或者形状,你可以使用 torch.view:
torch.manual_seed(20211013)
x = torch.randn([4, 4])
print(x)
# tensor([[ 0.9747, 0.8300, -0.6734, -0.4365],
# [ 0.1867, 0.9543, 0.3457, -0.1776],
# [ 0.5936, -0.7330, 0.2092, 1.1053],
# [ 1.3183, -1.9817, 1.9537, -1.2133]])y = x.view(16)
z = x.view(-1, 8) # -1是指这一维的维数由其他维度决定
print(x.size(), y.size(), z.size())
# torch.Size([4, 4]) torch.Size([16]) torch.Size([2, 8])print(y)
# tensor([ 0.9747, 0.8300, -0.6734, -0.4365, 0.1867, 0.9543, 0.3457, -0.1776,
# 0.5936, -0.7330, 0.2092, 1.1053, 1.3183, -1.9817, 1.9537, -1.2133])print(z)
# tensor([[ 0.9747, 0.8300, -0.6734, -0.4365, 0.1867, 0.9543, 0.3457, -0.1776],
# [ 0.5936, -0.7330, 0.2092, 1.1053, 1.3183, -1.9817, 1.9537, -1.2133]])
注意 view() 返回的新tensor与源tensor共享内存(其实是同一个tensor),也即更改其中的一个,另外一个也会跟着改变。(顾名思义,view仅仅是改变了对这个张量的观察⻆度)。
x += 1
print(x)
# tensor([[ 1.9747, 1.8300, 0.3266, 0.5635],
# [ 1.1867, 1.9543, 1.3457, 0.8224],
# [ 1.5936, 0.2670, 1.2092, 2.1053],
# [ 2.3183, -0.9817, 2.9537, -0.2133]])print(y) # 也加了了1
# tensor([ 1.9747, 1.8300, 0.3266, 0.5635, 1.1867, 1.9543, 1.3457, 0.8224,
# 1.5936, 0.2670, 1.2092, 2.1053, 2.3183, -0.9817, 2.9537, -0.2133])
所以如果我们想返回一个真正新的副本(即不共享内存)该怎么办呢?
Pytorch还提供了一 个reshape()可以改变形状,但是此函数并不能保证返回的是其拷贝,所以不推荐使用。推荐先用clone创造一个副本然后再使用view。
注意:使用clone还有一个好处是会被记录在计算图中,即梯度回传到副本时也会传到源 Tensor 。
如果你有一个元素 tensor ,使用 .item() 来获得这个 value,即得到Python的标量:
x = torch.randn(1)
print(x)
# tensor([0.1032])
print(x.item())
# 0.10324124991893768
PyTorch中的 Tensor 支持超过一百种操作,包括转置、索引、切片、数学运算、线性代数、随机数等等,可参考官方文档。
广播机制
当对两个形状不同的 Tensor 按元素运算时,可能会触发广播(broadcasting)机制:先适当复制元素使这两个 Tensor 形状相同后再按元素运算。
import torchx = torch.arange(1, 3).view(1, 2)
print(x)
# tensor([1, 2])y = torch.arange(1, 4).view(3, 1)
print(y)
# tensor([[1],
# [2],
# [3]])print(x + y)
# tensor([[2, 3],
# [3, 4],
# [4, 5]])
由于 x 和 y 分别是1行2列和3行1列的矩阵,如果要计算 x + y ,那么 x 中第一行的2个元素被广播(复制)到了第二行和第三行,y中第1列的3个元素被广播(复制)到了第二列。如此,就可以对2 个3行2列的矩阵按元素相加。
2.2 自动求导
PyTorch 中,所有神经网络的核心是autograd包。autograd包为张量上的所有操作提供了自动求导机制。它是一个在运行时定义(define-by-run)的框架,这意味着反向传播是根据代码如何运行来决定的,并且每次迭代可以是不同的。
torch.Tensor是这个包的核心类。如果设置它的属性.requires_grad为True,那么它将会追踪对于该张量的所有操作。当完成计算后可以通过调用.backward(),来自动计算所有的梯度。这个张量的所有梯度将会自动累加到.grad属性。
注意:在y.backward()时,如果 y 是标量,则不需要为backward()传入任何参数;否则,需要传入一个与 y 同形的Tensor。
要阻止一个张量被跟踪历史,可以调用.detach()方法将其与计算历史分离,并阻止它未来的计算记录被跟踪。为了防止跟踪历史记录(和使用内存),可以将代码块包装在 with torch.no_grad():中。在评估模型时特别有用,因为模型可能具有requires_grad = True 的可训练的参数,但是我们不需要在此过程中对他们进行梯度计算。
还有一个类对于autograd的实现非常重要:Function。Tensor和Function互相连接生成了一个无环图(acyclic graph),它编码了完整的计算历史。每个张量都有一个.grad_fn属性,该属性引用了创建 Tensor自身的Function(除非这个张量是用户手动创建的,即这个张量的grad_fn是None)。
如果需要计算导数,可以在 Tensor 上调用 .backward()。如果Tensor 是一个标量(即它包含一个元素的数据),则不需要为backward()指定任何参数,但是如果它有更多的元素,则需要指定一个gradient参数,该参数是形状匹配的张量。
import torch
创建一个张量并设置requires_grad=True用来追踪其计算历史。
x = torch.ones([2, 2], requires_grad=True)
print(x)
# tensor([[1., 1.],
# [1., 1.]], requires_grad=True)
对这个张量做一次运算:
y = x ** 2
print(y)
# tensor([[1., 1.],
# [1., 1.]], grad_fn=<PowBackward0>)
y是计算的结果,所以它有grad_fn属性。
print(y.grad_fn)
# <PowBackward0 object at 0x000000600D5E1D30>
对y进行更多操作
z = y * y * 3
print(z)
# tensor([[3., 3.],
# [3., 3.]], grad_fn=<MulBackward0>)out = z.mean()
print(out)
# tensor(3., grad_fn=<MeanBackward0>)
.requires_grad_(...)原地改变了现有张量的requires_grad标志。如果没有指定的话,默认输入的这个标志是False。
torch.manual_seed(20211013)
a = torch.rand(2, 2) # 缺失情况下默认 requires_grad = False
a = ((a * 3) / (a - 1))
print(a.requires_grad) # Falsea.requires_grad_(True)
print(a.requires_grad) # Trueb = (a * a).sum()
print(b.grad_fn)
# <SumBackward0 object at 0x000000A46BEC1D30>
梯度
现在开始进行反向传播,因为out是一个标量,因此out.backward()和out.backward(torch.tensor(1.))等价。
输出导数d(out)/dx
x = torch.ones([2, 2], requires_grad=True)
y = x ** 2
z = y * y * 3
out = z.mean()
out.backward()print(x.grad)
# tensor([[3., 3.],
# [3., 3.]])
数学上,若有向量函数$\vec{y}=f(\vec{x})$,那么 $\vec{y}$ 关于 $\vec{x}$
的梯度就是一个雅可比矩阵:
J=\left(\begin{array}{ccc}\frac{\partial y_{1}}{\partial x_{1}} & \cdots & \frac{\partial y_{1}}{\partial x_{n}} \\ \vdots & \ddots & \vdots \\ \frac{\partial y_{m}}{\partial x_{1}} & \cdots & \frac{\partial y_{m}}{\partial x_{n}}\end{array}\right)
而 torch.autograd 这个包就是用来计算一些雅可比矩阵的乘积的。例如,如果$v$是一个标量函数$l = g(\vec{y})$的梯度:
v=\left(\begin{array}{lll}\frac{\partial l}{\partial y_{1}} & \cdots & \frac{\partial l}{\partial y_{m}}\end{array}\right)
由链式法则,我们可以得到:
v J=\left(\begin{array}{lll}\frac{\partial l}{\partial y_{1}} & \cdots & \frac{\partial l}{\partial y_{m}}\end{array}\right)\left(\begin{array}{ccc}\frac{\partial y_{1}}{\partial x_{1}} & \cdots & \frac{\partial y_{1}}{\partial x_{n}} \\ \vdots & \ddots & \vdots \\ \frac{\partial y_{m}}{\partial x_{1}} & \cdots & \frac{\partial y_{m}}{\partial x_{n}}\end{array}\right)=\left(\begin{array}{lll}\frac{\partial l}{\partial x_{1}} & \cdots & \frac{\partial l}{\partial x_{n}}\end{array}\right)
注意:grad在反向传播过程中是累加的(accumulated),这意味着每一次运行反向传播,梯度都会累加之前的梯度,所以一般在反向传播之前需把梯度清零。
# 再来反向传播一次,注意grad是累加的 2 out2 = x.sum()
out2 = x.sum()
out2.backward()
print(x.grad)
# tensor([[4., 4.],
# [4., 4.]])out3 = x.sum()
x.grad.data.zero_()
out3.backward()
print(x.grad)
# tensor([[1., 1.],
# [1., 1.]])
现在我们来看一个雅可比向量积的例子:
torch.manual_seed(20211013)
x = torch.randn(3, requires_grad=True)
print(x)
# tensor([ 0.8004, -1.4908, -0.6038], requires_grad=True)y = x * 2
i = 0
while y.data.norm() < 1000:y = y * 2i = i + 1
print(y)
# tensor([ 819.6005, -1526.5718, -618.2654], grad_fn=<MulBackward0>)
print(i)
# 9
在这种情况下,y不再是标量。torch.autograd不能直接计算完整的雅可比矩阵,但是如果我们只想要雅可比向量积,只需将这个向量作为参数传给backward:
torch.manual_seed(20211013)
x = torch.randn(3, requires_grad=True)
print(x)
# tensor([ 0.8004, -1.4908, -0.6038], requires_grad=True)
y = x * 2
print(y)
# tensor([ 1.6008, -2.9816, -1.2075], grad_fn=<MulBackward0>)
y.backward()
# RuntimeError: grad can be implicitly created only for scalar outputs
print(x.grad)
v = torch.tensor([0.1, 1.0, 0.0001], dtype=torch.float)
y.backward(v)
print(x.grad)
# tensor([1.0240e+02, 1.0240e+03, 1.0240e-01])
也可以通过将代码块包装在with torch.no_grad(): 中,来阻止autograd跟踪设置了.requires_grad=True的张量的历史记录。
torch.manual_seed(20211013)
x = torch.randn(3, requires_grad=True)
print(x.requires_grad) # True
print((x ** 2).requires_grad) # Truewith torch.no_grad():print((x ** 2).requires_grad) # False
如果我们想要修改 tensor 的数值,但是又不希望被 autograd 记录(即不会影响反向传播), 那么我么可以对 tensor.data 进行操作。
x = torch.ones(1,requires_grad=True)print(x.data) # 还是一个tensor
# tensor([1.])print(x.data.requires_grad) # 但是已经是独立于计算图之外
# Falsey = 2 * x
x.data *= 100 # 只改变了值,不会记录在计算图,所以不会影响梯度传播
y.backward()
print(x) # 更改data的值也会影响tensor的值
# tensor([100.], requires_grad=True)print(x.grad)
# tensor([2.])
2.3 并行计算简介
在利用PyTorch做深度学习的过程中,可能会遇到数据量较大无法在单块GPU上完成,或者需要提升计算速度的场景,这时就需要用到并行计算。本节让我们来简单地了解一下并行计算的基本概念和主要实现方式,具体的内容会在课程的第二部分详细介绍。
2.3.1 为什么要做并行计算
我们学习PyTorch的目的就是可以编写我们自己的框架,来完成特定的任务。可以说,在深度学习时代,GPU的出现让我们可以训练的更快,更好。所以,如何充分利用GPU的性能来提高我们模型学习的效果,这一技能是我们必须要学习的。这一节,我们主要讲的就是PyTorch的并行计算。PyTorch可以在编写完模型之后,让多个GPU来参与训练。
2.3.2 CUDA是个啥
CUDA是我们使用GPU的提供商——NVIDIA提供的GPU并行计算框架。对于GPU本身的编程,使用的是CUDA语言来实现的。但是,在我们使用PyTorch编写深度学习代码时,使用的CUDA又是另一个意思。在PyTorch使用 CUDA表示要开始要求我们的模型或者数据开始使用GPU了。
在编写程序中,当我们使用了 cuda() 时,其功能是让我们的模型或者数据迁移到GPU当中,通过GPU开始计算。
2.3.3 做并行的方法
- 网络结构分布到不同的设备中(Network partitioning)
在刚开始做模型并行的时候,这个方案使用的比较多。其中主要的思路是,将一个模型的各个部分拆分,然后将不同的部分放入到GPU来做不同任务的计算。其架构如下:
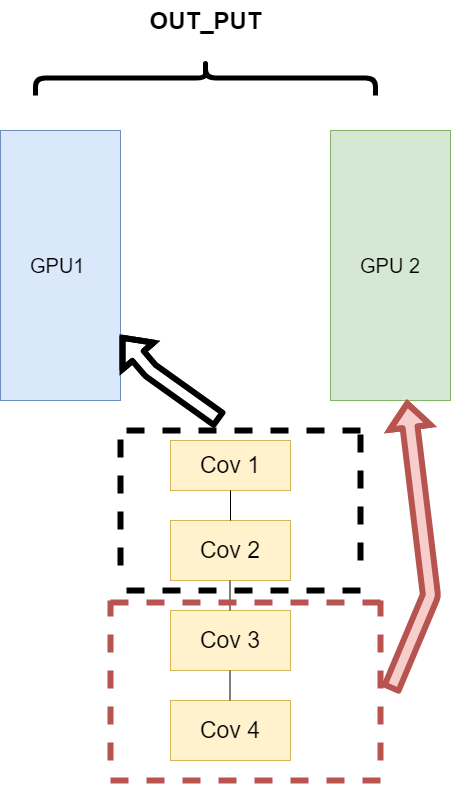
这里遇到的问题就是,不同模型组件在不同的GPU上时,GPU之间的传输就很重要,对于GPU之间的通信是一个考验。但是GPU的通信在这种密集任务中很难办到。所有这个方式慢慢淡出了视野,
- 同一层的任务分布到不同数据中(Layer-wise partitioning)
第二种方式就是,同一层的模型做一个拆分,让不同的GPU去训练同一层模型的部分任务。其架构如下:
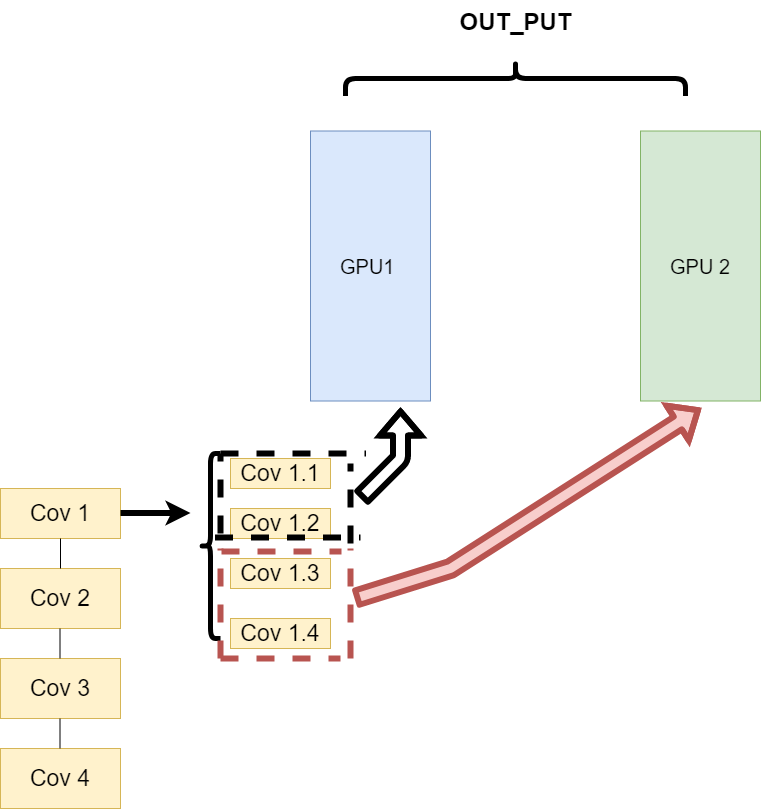
这样可以保证在不同组件之间传输的问题,但是在我们需要大量的训练,同步任务加重的情况下,会出现和第一种方式一样的问题。
- 不同的数据分布到不同的设备中,执行相同的任务(Data parallelism)
第三种方式有点不一样,它的逻辑是,我不再拆分模型,我训练的时候模型都是一整个模型。但是我将输入的数据拆分。所谓的拆分数据就是,同一个模型在不同GPU中训练一部分数据,然后再分别计算一部分数据之后,只需要将输出的数据做一个汇总,然后再反传。其架构如下:
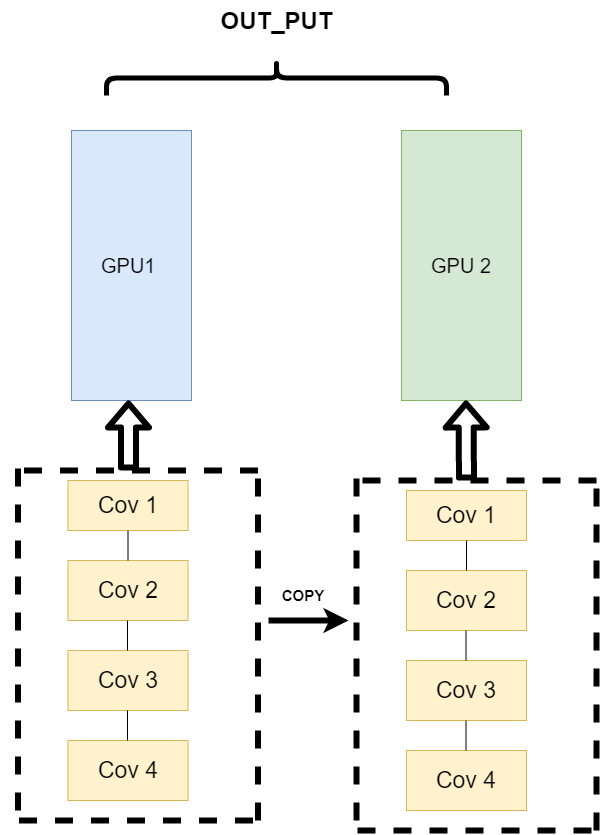
这种方式可以解决之前模式遇到的通讯问题。
PS:现在的主流方式是数据并行的方式(Data parallelism)
补充:通过股票数据感受张量概念。
在量化金融中,我们用股票数据举例来说明不同维度的张量。
阶段一:一个收盘价
斯蒂文查了查 2019 年 1 月 3 日平安银行 (000001.XSHE) 的收盘价,发现是 9.28,他默默将这个单数字存到 X0 里。

X0 又称为标量 (scalar),或更严谨的称为 0 维张量 (0D tensor)。
阶段二:加入时间维度
单天股票价格太少,至少要算一些均值、标准差这些统计量吧。
斯蒂文从一天的数据扩展到一年,下载了从 2019 年 1 月 3 日起过去一年的平安银行历史收盘价,存到 X1 里。

X1 在 X0 基础上添加了时间维度 (红色箭头),从标量扩展成向量 (vector),又称为 1 维张量 (1D tensor)。
阶段三:加入股票维度
单个股票太少,分散原则告诉我们需要投资相关性系数为负的两支股票。
斯蒂文增加了茅台股票 (600519.XSHG),下载了从 2019年 1 月 3 日起过去一年的平安银行和茅台历史收盘价,存到 X2 里。

X2 在 X1 基础上添加了横截维度(蓝色箭头),从向量扩展成矩阵(matrix),又称为 2 维张量(2D tensor)。
阶段四:加入信息维度
收盘价一个信息不够,在趋势追踪模型中,价格和交易量是在股票走势中相当重要的因素。
斯蒂文增加了交易量,下载了从 2019 年 1 月 3 日起过去一年的平安银行和茅台历史收盘价和交易量,存到 X3 里。

X3 在 X2 基础上添加了信息维度(绿色箭头),从矩阵扩展成 3 维张量(3D tensor)。
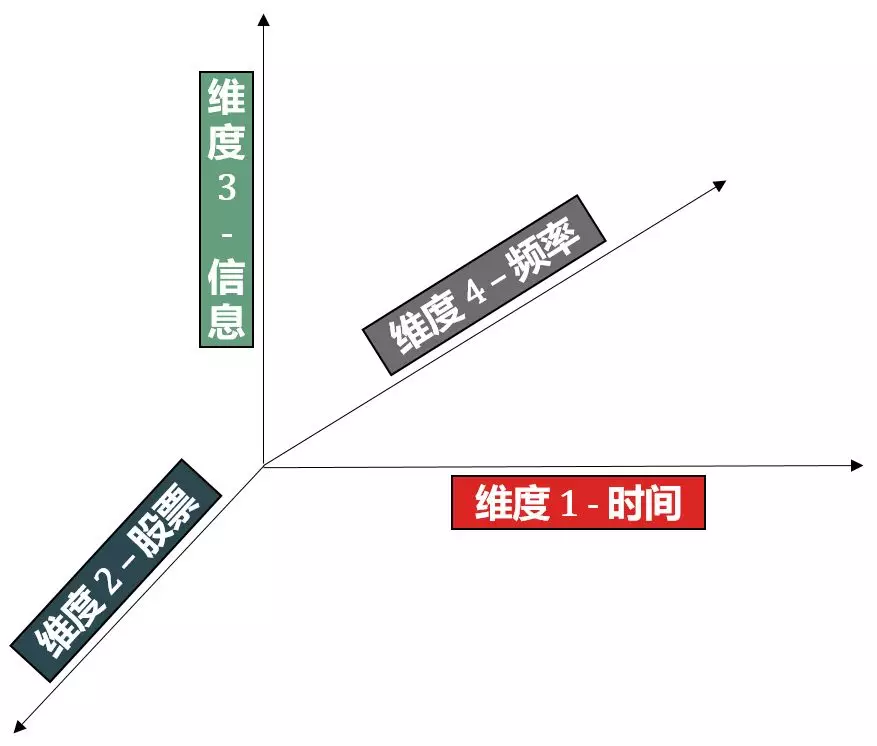
阶段五:加入频率维度
收盘信息太过于少,如果要日内交易怎么办?
斯蒂文又增加了 tick 数据,下载了从 2019 年 1 月 3 日起过去一年的平安银行和茅台历史 tick 价格和交易量,存到 X4 里。
国外和国内对于 tick 数据定义有些不同:
- 国外:任何委托单(order)使委托账本(order book)变化而得到的表格。
- 国内:对委托账本的按一定切片时间(500 毫秒,3 秒,6 秒等)抽样的信息。
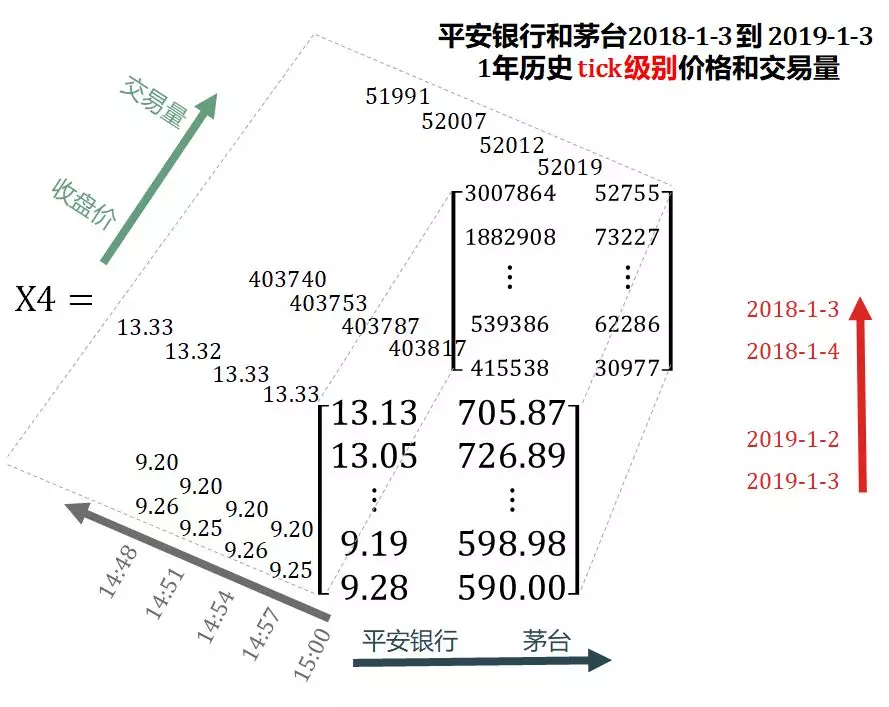
X4 在 X3 基础上添加了频率维度(灰色箭头),从 3 维张量扩展成 4 维张量 (4D tensor)。