目录
- 1. 说明
- 2. 猫狗大战
- 2.1 导入相关库
- 2.2 建立模型
- 2.3 模型编译
- 2.4 数据生成器
- 2.5 模型训练
- 2.6 模型保存
- 2.7 模型训练结果的可视化
- 3. 猫狗大战的CNN模型可视化结果图
- 4. 完整代码
- 5. 猫狗大战的迁移学习
1. 说明
本篇文章是CNN的另外一个例子,猫狗大战,是自制数据集的例子。之前的例子都是python中库自带的,但是这次的例子是自己搜集数据集,如下图所示整理,数据集的链接会放在评论区。
2. 猫狗大战
2.1 导入相关库
以下第三方库是python专门用于深度学习的库
from keras.models import Sequential
from keras.layers import Dense, Conv2D, Flatten, Dropout, BatchNormalization
from keras.optimizers import RMSprop, Adam
from keras.preprocessing.image import ImageDataGenerator
import sys, os # 目录结构
from keras.layers import MaxPool2D
import matplotlib.pyplot as plt
import pandas
from keras.callbacks import EarlyStopping, ReduceLROnPlateau
2.2 建立模型
这是采用另外一种书写方式建立模型。
构建了三层卷积层,三层池化层,然后是展平层(将二维特征图拉直输入给全连接层),然后是三层全连接层,并且加入了dropout层。
"1.模型建立"
# 1.卷积层,输入图片大小(150, 150, 3), 卷积核个数16,卷积核大小(5, 5), 激活函数'relu'
conv_layer1 = Conv2D(input_shape=(150, 150, 3), filters=16, kernel_size=(5, 5), activation='relu')
# 2.最大池化层,池化层大小(2, 2), 步长为2
max_pool1 = MaxPool2D(pool_size=(2, 2), strides=2)
# 3.卷积层,卷积核个数32,卷积核大小(5, 5), 激活函数'relu'
conv_layer2 = Conv2D(filters=32, kernel_size=(5, 5), activation='relu')
# 4.最大池化层,池化层大小(2, 2), 步长为2
max_pool2 = MaxPool2D(pool_size=(2, 2), strides=2)
# 5.卷积层,卷积核个数64,卷积核大小(5, 5), 激活函数'relu'
conv_layer3 = Conv2D(filters=64, kernel_size=(5, 5), activation='relu')
# 6.最大池化层,池化层大小(2, 2), 步长为2
max_pool3 = MaxPool2D(pool_size=(2, 2), strides=2)
# 7.卷积层,卷积核个数128,卷积核大小(5, 5), 激活函数'relu'
conv_layer4 = Conv2D(filters=128, kernel_size=(5, 5), activation='relu')
# 8.最大池化层,池化层大小(2, 2), 步长为2
max_pool4 = MaxPool2D(pool_size=(2, 2), strides=2)
# 9.展平层
flatten_layer = Flatten()
# 10.Dropout层, Dropout(0.2)
third_dropout = Dropout(0.2)
# 11.全连接层/隐藏层1,240个节点, 激活函数'relu'
hidden_layer1 = Dense(240, activation='relu')
# 12.全连接层/隐藏层2,84个节点, 激活函数'relu'
hidden_layer3 = Dense(84, activation='relu')
# 13.Dropout层, Dropout(0.2)
fif_dropout = Dropout(0.5)
# 14.输出层,输出节点个数1, 激活函数'sigmoid'
output_layer = Dense(1, activation='sigmoid')
model = Sequential([conv_layer1, max_pool1, conv_layer2, max_pool2,conv_layer3, max_pool3, conv_layer4, max_pool4,flatten_layer, third_dropout, hidden_layer1,hidden_layer3, fif_dropout, output_layer])
2.3 模型编译
模型的优化器是Adam,学习率是0.01,
损失函数是binary_crossentropy,二分类交叉熵,
性能指标是正确率accuracy,
另外还加入了回调机制。
回调机制简单理解为训练集的准确率持续上升,而验证集准确率基本不变,此时已经出现过拟合,应该调制学习率,让验证集的准确率也上升。
"2.模型编译"
# 模型编译,2分类:binary_crossentropy
model.compile(optimizer=Adam(lr=0.0001), # 优化器选择Adam,初始学习率设置为0.0001loss='binary_crossentropy', # 代价函数选择 binary_crossentropymetrics=['accuracy']) # 设置指标为准确率
model.summary() # 模型统计# 回调机制 动态调整学习率
reduce = ReduceLROnPlateau(monitor='val_accuracy', # 设置监测的值为val_accuracypatience=2, # 设置耐心容忍次数为2verbose=1, #factor=0.5, # 缩放学习率的值为0.5,学习率将以lr = lr*factor的形式被减少min_lr=0.000001 # 学习率最小值0.000001) # 监控val_accuracy增加趋势
2.4 数据生成器
加载自制数据集
利用数据生成器对数据进行数据加强,即每次训练时输入的图片会是原图片的翻转,平移,旋转,缩放,这样是为了降低过拟合的影响。
然后通过迭代器进行数据加载,目标图像大小统一尺寸1501503,设置每次加载到训练网络的图像数目,设置而分类模型(默认one-hot编码),并且数据打乱。
"3.数据生成器"
# 生成器对象1: 归一化
gen = ImageDataGenerator(rescale=1 / 255.0)
# 生成器对象2: 归一化 + 数据加强
gen1 = ImageDataGenerator(rescale=1 / 255.0,rotation_range=5, # 图片随机旋转的角度5度width_shift_range=0.1,height_shift_range=0.1, # 水平和竖直方向随机移动0.1shear_range=0.1, # 剪切变换的程度0.1zoom_range=0.1, # 随机放大的程度0.1fill_mode='nearest') # 当需要进行像素填充时选择最近的像素进行填充
# 拼接训练和验证的两个路径
train_path = os.path.join(sys.path[0], 'dog-cats', 'train')
val_path = os.path.join(sys.path[0], 'dog-cats', 'val')
print('训练数据路径: ', train_path)
print('验证数据路径: ', val_path)
# 训练和验证的两个迭代器
train_iter = gen1.flow_from_directory(train_path, # 训练train目录路径target_size=(150, 150), # 目标图像大小统一尺寸150batch_size=8, # 设置每次加载到内存的图像大小class_mode='binary', # 设置分类模型(默认one-hot编码)shuffle=True) # 是否打乱
val_iter = gen.flow_from_directory(val_path, # 测试val目录路径target_size=(150, 150), # 目标图像大小统一尺寸150batch_size=8, # 设置每次加载到内存的图像大小class_mode='binary', # 设置分类模型(默认one-hot编码)shuffle=True) # 是否打乱
2.5 模型训练
模型训练的次数是20,每1次循环进行测试
"4.模型训练"
# 模型的训练, model.fit
result = model.fit(train_iter, # 设置训练数据的迭代器epochs=20, # 循环次数20次validation_data=val_iter, # 验证数据的迭代器callbacks=[reduce], # 回调机制设置为reduceverbose=1)
2.6 模型保存
以.h5文件格式保存模型
"5.模型保存"
# 保存训练好的模型
model.save('my_cnn_cat_dog.h5')
2.7 模型训练结果的可视化
对模型的训练结果进行可视化,可视化的结果用曲线图的形式展现
"6.模型训练时的可视化"
# 显示训练集和验证集的acc和loss曲线
acc = result.history['accuracy'] # 获取模型训练中的accuracy
val_acc = result.history['val_accuracy'] # 获取模型训练中的val_accuracy
loss = result.history['loss'] # 获取模型训练中的loss
val_loss = result.history['val_loss'] # 获取模型训练中的val_loss
# 绘值acc曲线
plt.figure(1)
plt.plot(acc, label='Training Accuracy')
plt.plot(val_acc, label='Validation Accuracy')
plt.title('Training and Validation Accuracy')
plt.legend()
plt.savefig('cat_dog_acc.png', dpi=600)
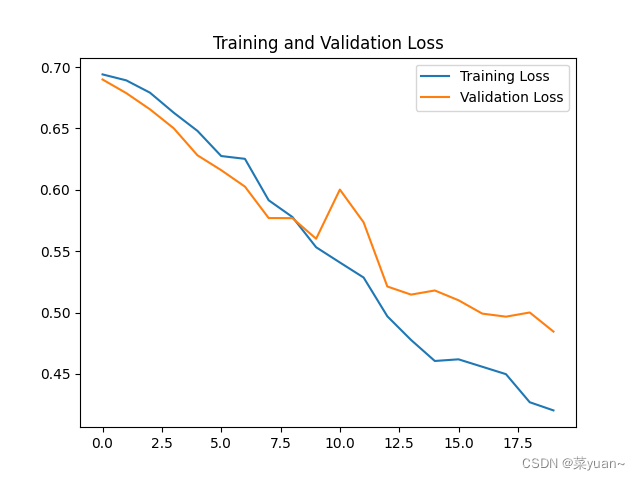
# 绘制loss曲线
plt.figure(2)
plt.plot(loss, label='Training Loss')
plt.plot(val_loss, label='Validation Loss')
plt.title('Training and Validation Loss')
plt.legend()
plt.savefig('cat_dog_loss.png', dpi=600)
plt.show() # 将结果显示出来
3. 猫狗大战的CNN模型可视化结果图
Epoch 1/20
250/250 [==============================] - 59s 231ms/step - loss: 0.6940 - accuracy: 0.4925 - val_loss: 0.6899 - val_accuracy: 0.5050 - lr: 1.0000e-04
Epoch 2/20
250/250 [==============================] - 55s 219ms/step - loss: 0.6891 - accuracy: 0.5125 - val_loss: 0.6787 - val_accuracy: 0.5880 - lr: 1.0000e-04
Epoch 3/20
250/250 [==============================] - 54s 216ms/step - loss: 0.6791 - accuracy: 0.5840 - val_loss: 0.6655 - val_accuracy: 0.6080 - lr: 1.0000e-04
Epoch 4/20
250/250 [==============================] - 60s 238ms/step - loss: 0.6628 - accuracy: 0.6040 - val_loss: 0.6501 - val_accuracy: 0.6300 - lr: 1.0000e-04
Epoch 5/20
250/250 [==============================] - 57s 226ms/step - loss: 0.6480 - accuracy: 0.6400 - val_loss: 0.6281 - val_accuracy: 0.6590 - lr: 1.0000e-04
Epoch 6/20
250/250 [==============================] - 67s 268ms/step - loss: 0.6275 - accuracy: 0.6565 - val_loss: 0.6160 - val_accuracy: 0.6690 - lr: 1.0000e-04
Epoch 7/20
250/250 [==============================] - 62s 247ms/step - loss: 0.6252 - accuracy: 0.6570 - val_loss: 0.6026 - val_accuracy: 0.6790 - lr: 1.0000e-04
Epoch 8/20
250/250 [==============================] - 63s 251ms/step - loss: 0.5915 - accuracy: 0.6770 - val_loss: 0.5770 - val_accuracy: 0.6960 - lr: 1.0000e-04
Epoch 9/20
250/250 [==============================] - 57s 228ms/step - loss: 0.5778 - accuracy: 0.6930 - val_loss: 0.5769 - val_accuracy: 0.6880 - lr: 1.0000e-04
Epoch 10/20
250/250 [==============================] - 55s 219ms/step - loss: 0.5532 - accuracy: 0.7085 - val_loss: 0.5601 - val_accuracy: 0.6970 - lr: 1.0000e-04
Epoch 11/20
250/250 [==============================] - 55s 221ms/step - loss: 0.5408 - accuracy: 0.7370 - val_loss: 0.6002 - val_accuracy: 0.6810 - lr: 1.0000e-04
Epoch 12/20
250/250 [==============================] - ETA: 0s - loss: 0.5285 - accuracy: 0.7350
Epoch 12: ReduceLROnPlateau reducing learning rate to 4.999999873689376e-05.
250/250 [==============================] - 56s 226ms/step - loss: 0.5285 - accuracy: 0.7350 - val_loss: 0.5735 - val_accuracy: 0.6960 - lr: 1.0000e-04
Epoch 13/20
250/250 [==============================] - 70s 280ms/step - loss: 0.4969 - accuracy: 0.7595 - val_loss: 0.5212 - val_accuracy: 0.7410 - lr: 5.0000e-05
Epoch 14/20
250/250 [==============================] - 73s 292ms/step - loss: 0.4776 - accuracy: 0.7740 - val_loss: 0.5146 - val_accuracy: 0.7470 - lr: 5.0000e-05
Epoch 15/20
250/250 [==============================] - 71s 285ms/step - loss: 0.4605 - accuracy: 0.7930 - val_loss: 0.5180 - val_accuracy: 0.7530 - lr: 5.0000e-05
Epoch 16/20
250/250 [==============================] - 74s 298ms/step - loss: 0.4619 - accuracy: 0.7825 - val_loss: 0.5100 - val_accuracy: 0.7510 - lr: 5.0000e-05
Epoch 17/20
250/250 [==============================] - 72s 289ms/step - loss: 0.4558 - accuracy: 0.7885 - val_loss: 0.4991 - val_accuracy: 0.7630 - lr: 5.0000e-05
Epoch 18/20
250/250 [==============================] - 75s 300ms/step - loss: 0.4498 - accuracy: 0.7900 - val_loss: 0.4966 - val_accuracy: 0.7580 - lr: 5.0000e-05
Epoch 19/20
250/250 [==============================] - 61s 243ms/step - loss: 0.4269 - accuracy: 0.8060 - val_loss: 0.5000 - val_accuracy: 0.7690 - lr: 5.0000e-05
Epoch 20/20
250/250 [==============================] - 56s 224ms/step - loss: 0.4202 - accuracy: 0.8090 - val_loss: 0.4845 - val_accuracy: 0.7700 - lr: 5.0000e-05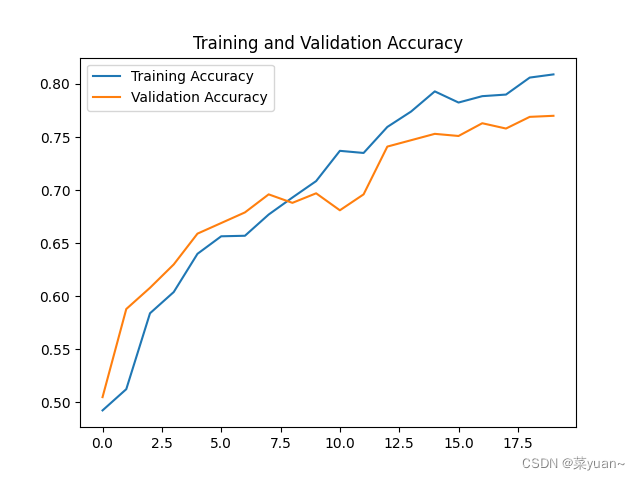
从以上结果可知,模型的准确率达到了77%。可以发现并不是很高,因此采用下面的迁移学习。
4. 完整代码
from keras.models import Sequential
from keras.layers import Dense, Conv2D, Flatten, Dropout, BatchNormalization
from keras.optimizers import RMSprop, Adam
from keras.preprocessing.image import ImageDataGenerator
import sys, os # 目录结构
from keras.layers import MaxPool2D
import matplotlib.pyplot as plt
import pandas
from keras.callbacks import EarlyStopping, ReduceLROnPlateau"1.模型建立"
# 1.卷积层,输入图片大小(150, 150, 3), 卷积核个数16,卷积核大小(5, 5), 激活函数'relu'
conv_layer1 = Conv2D(input_shape=(150, 150, 3), filters=16, kernel_size=(5, 5), activation='relu')
# 2.最大池化层,池化层大小(2, 2), 步长为2
max_pool1 = MaxPool2D(pool_size=(2, 2), strides=2)
# 3.卷积层,卷积核个数32,卷积核大小(5, 5), 激活函数'relu'
conv_layer2 = Conv2D(filters=32, kernel_size=(5, 5), activation='relu')
# 4.最大池化层,池化层大小(2, 2), 步长为2
max_pool2 = MaxPool2D(pool_size=(2, 2), strides=2)
# 5.卷积层,卷积核个数64,卷积核大小(5, 5), 激活函数'relu'
conv_layer3 = Conv2D(filters=64, kernel_size=(5, 5), activation='relu')
# 6.最大池化层,池化层大小(2, 2), 步长为2
max_pool3 = MaxPool2D(pool_size=(2, 2), strides=2)
# 7.卷积层,卷积核个数128,卷积核大小(5, 5), 激活函数'relu'
conv_layer4 = Conv2D(filters=128, kernel_size=(5, 5), activation='relu')
# 8.最大池化层,池化层大小(2, 2), 步长为2
max_pool4 = MaxPool2D(pool_size=(2, 2), strides=2)
# 9.展平层
flatten_layer = Flatten()
# 10.Dropout层, Dropout(0.2)
third_dropout = Dropout(0.2)
# 11.全连接层/隐藏层1,240个节点, 激活函数'relu'
hidden_layer1 = Dense(240, activation='relu')
# 12.全连接层/隐藏层2,84个节点, 激活函数'relu'
hidden_layer3 = Dense(84, activation='relu')
# 13.Dropout层, Dropout(0.2)
fif_dropout = Dropout(0.5)
# 14.输出层,输出节点个数1, 激活函数'sigmoid'
output_layer = Dense(1, activation='sigmoid')
model = Sequential([conv_layer1, max_pool1, conv_layer2, max_pool2,conv_layer3, max_pool3, conv_layer4, max_pool4,flatten_layer, third_dropout, hidden_layer1,hidden_layer3, fif_dropout, output_layer])
"2.模型编译"
# 模型编译,2分类:binary_crossentropy
model.compile(optimizer=Adam(lr=0.0001), # 优化器选择Adam,初始学习率设置为0.0001loss='binary_crossentropy', # 代价函数选择 binary_crossentropymetrics=['accuracy']) # 设置指标为准确率
model.summary() # 模型统计# 回调机制 动态调整学习率
reduce = ReduceLROnPlateau(monitor='val_accuracy', # 设置监测的值为val_accuracypatience=2, # 设置耐心容忍次数为2verbose=1, #factor=0.5, # 缩放学习率的值为0.5,学习率将以lr = lr*factor的形式被减少min_lr=0.000001 # 学习率最小值0.000001) # 监控val_accuracy增加趋势
"3.数据生成器"
# 生成器对象1: 归一化
gen = ImageDataGenerator(rescale=1 / 255.0)
# 生成器对象2: 归一化 + 数据加强
gen1 = ImageDataGenerator(rescale=1 / 255.0,rotation_range=5, # 图片随机旋转的角度5度width_shift_range=0.1,height_shift_range=0.1, # 水平和竖直方向随机移动0.1shear_range=0.1, # 剪切变换的程度0.1zoom_range=0.1, # 随机放大的程度0.1fill_mode='nearest') # 当需要进行像素填充时选择最近的像素进行填充
# 拼接训练和验证的两个路径
train_path = os.path.join(sys.path[0], 'dog-cats', 'train')
val_path = os.path.join(sys.path[0], 'dog-cats', 'val')
print('训练数据路径: ', train_path)
print('验证数据路径: ', val_path)
# 训练和验证的两个迭代器
train_iter = gen1.flow_from_directory(train_path, # 训练train目录路径target_size=(150, 150), # 目标图像大小统一尺寸150batch_size=8, # 设置每次加载到内存的图像大小class_mode='binary', # 设置分类模型(默认one-hot编码)shuffle=True) # 是否打乱
val_iter = gen.flow_from_directory(val_path, # 测试val目录路径target_size=(150, 150), # 目标图像大小统一尺寸150batch_size=8, # 设置每次加载到内存的图像大小class_mode='binary', # 设置分类模型(默认one-hot编码)shuffle=True) # 是否打乱
"4.模型训练"
# 模型的训练, model.fit
result = model.fit(train_iter, # 设置训练数据的迭代器epochs=20, # 循环次数20次validation_data=val_iter, # 验证数据的迭代器callbacks=[reduce], # 回调机制设置为reduceverbose=1)"5.模型保存"
# 保存训练好的模型
model.save('my_cnn_cat_dog.h5')"6.模型训练时的可视化"
# 显示训练集和验证集的acc和loss曲线
acc = result.history['accuracy'] # 获取模型训练中的accuracy
val_acc = result.history['val_accuracy'] # 获取模型训练中的val_accuracy
loss = result.history['loss'] # 获取模型训练中的loss
val_loss = result.history['val_loss'] # 获取模型训练中的val_loss
# 绘值acc曲线
plt.figure(1)
plt.plot(acc, label='Training Accuracy')
plt.plot(val_acc, label='Validation Accuracy')
plt.title('Training and Validation Accuracy')
plt.legend()
plt.savefig('cat_dog_acc.png', dpi=600)
# 绘制loss曲线
plt.figure(2)
plt.plot(loss, label='Training Loss')
plt.plot(val_loss, label='Validation Loss')
plt.title('Training and Validation Loss')
plt.legend()
plt.savefig('cat_dog_loss.png', dpi=600)
plt.show() # 将结果显示出来5. 猫狗大战的迁移学习
迁移学习简单来说就是将别人已经训练好的模型拿来自己用。
from keras.applications import DenseNet121
from keras.models import Sequential
from keras.layers import Dense, Conv2D, Flatten, Dropout, BatchNormalization
from keras.optimizers import RMSprop, Adam
from keras.preprocessing.image import ImageDataGenerator
import sys, os # 目录结构
from keras.layers import MaxPool2D
import matplotlib.pyplot as plt
import pandas
from keras.callbacks import EarlyStopping, ReduceLROnPlateau"1.模型建立"
# 加载DenseNet网络模型,并去掉最后一层全连接层,最后一个池化层设置为max pooling
net = DenseNet121(weights='imagenet', include_top=False, pooling='max')
# 设计为不参与优化,即MobileNet这部分参数固定不动
net.trainable = False
newnet = Sequential([net, # 去掉最后一层的DenseNet121Dense(1024, activation='relu'), # 追加全连接层BatchNormalization(), # 追加BN层Dropout(rate=0.5), # 追加Dropout层,防止过拟合Dense(1,activation='sigmoid') # 根据宝可梦数据的任务,设置最后一层输出节点数为5
])
newnet.build(input_shape=(None, 150, 150, 3))"2.模型编译"
newnet.compile(optimizer=Adam(lr=0.0001), loss="binary_crossentropy", metrics=["accuracy"])
newnet.summary()# 回调机制 动态调整学习率
reduce = ReduceLROnPlateau(monitor='val_accuracy', # 设置监测的值为val_accuracypatience=2, # 设置耐心容忍次数为2verbose=1, #factor=0.5, # 缩放学习率的值为0.5,学习率将以lr = lr*factor的形式被减少min_lr=0.000001 # 学习率最小值0.000001) # 监控val_accuracy增加趋势"3.数据生成器"
# 生成器对象1: 归一化
gen = ImageDataGenerator(rescale=1 / 255.0)
# 生成器对象2: 归一化 + 数据加强
gen1 = ImageDataGenerator(rescale=1 / 255.0,rotation_range=5, # 图片随机旋转的角度5度width_shift_range=0.1,height_shift_range=0.1, # 水平和竖直方向随机移动0.1shear_range=0.1, # 剪切变换的程度0.1zoom_range=0.1, # 随机放大的程度0.1fill_mode='nearest') # 当需要进行像素填充时选择最近的像素进行填充
# 拼接训练和验证的两个路径
train_path = os.path.join(sys.path[0], 'dog-cats', 'train')
val_path = os.path.join(sys.path[0], 'dog-cats', 'val')
print('训练数据路径: ', train_path)
print('验证数据路径: ', val_path)
# 训练和验证的两个迭代器
train_iter = gen1.flow_from_directory(train_path, # 训练train目录路径target_size=(150, 150), # 目标图像大小统一尺寸150batch_size=10, # 设置每次加载到内存的图像大小class_mode='binary', # 设置分类模型(默认one-hot编码)shuffle=True) # 是否打乱
val_iter = gen.flow_from_directory(val_path, # 测试val目录路径target_size=(150, 150), # 目标图像大小统一尺寸150batch_size=10, # 设置每次加载到内存的图像大小class_mode='binary', # 设置分类模型(默认one-hot编码)shuffle=True) # 是否打乱
"4.模型训练"
# 模型的训练, newnet.fit
result = newnet.fit(train_iter, # 设置训练数据的迭代器epochs=20, # 循环次数20次validation_data=val_iter, # 验证数据的迭代器callbacks=[reduce], # 回调机制设置为reduceverbose=1)"5.模型保存"
# 保存训练好的模型
newnet.save('my_cnn_cat_dog_3.h5')"6.模型训练时的可视化"
# 显示训练集和验证集的acc和loss曲线
acc = result.history['accuracy'] # 获取模型训练中的accuracy
val_acc = result.history['val_accuracy'] # 获取模型训练中的val_accuracy
loss = result.history['loss'] # 获取模型训练中的loss
val_loss = result.history['val_loss'] # 获取模型训练中的val_loss
# 绘值acc曲线
plt.figure(1)
plt.plot(acc, label='Training Accuracy')
plt.plot(val_acc, label='Validation Accuracy')
plt.title('Training and Validation Accuracy')
plt.legend()
plt.savefig('cat_dog_acc_3.png', dpi=600)
# 绘制loss曲线
plt.figure(2)
plt.plot(loss, label='Training Loss')
plt.plot(val_loss, label='Validation Loss')
plt.title('Training and Validation Loss')
plt.legend()
plt.savefig('cat_dog_loss_3.png', dpi=600)
plt.show() # 将结果显示出来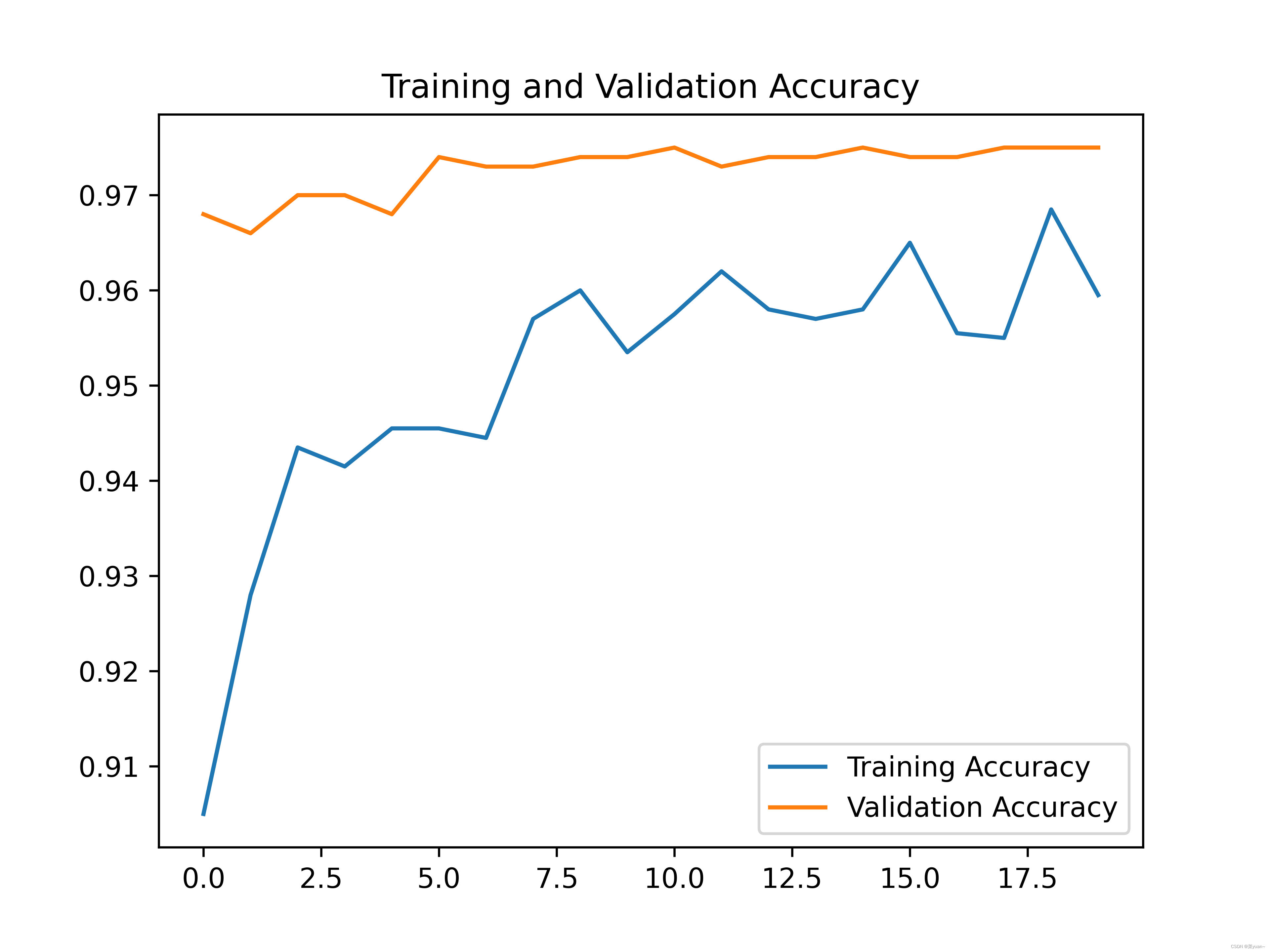
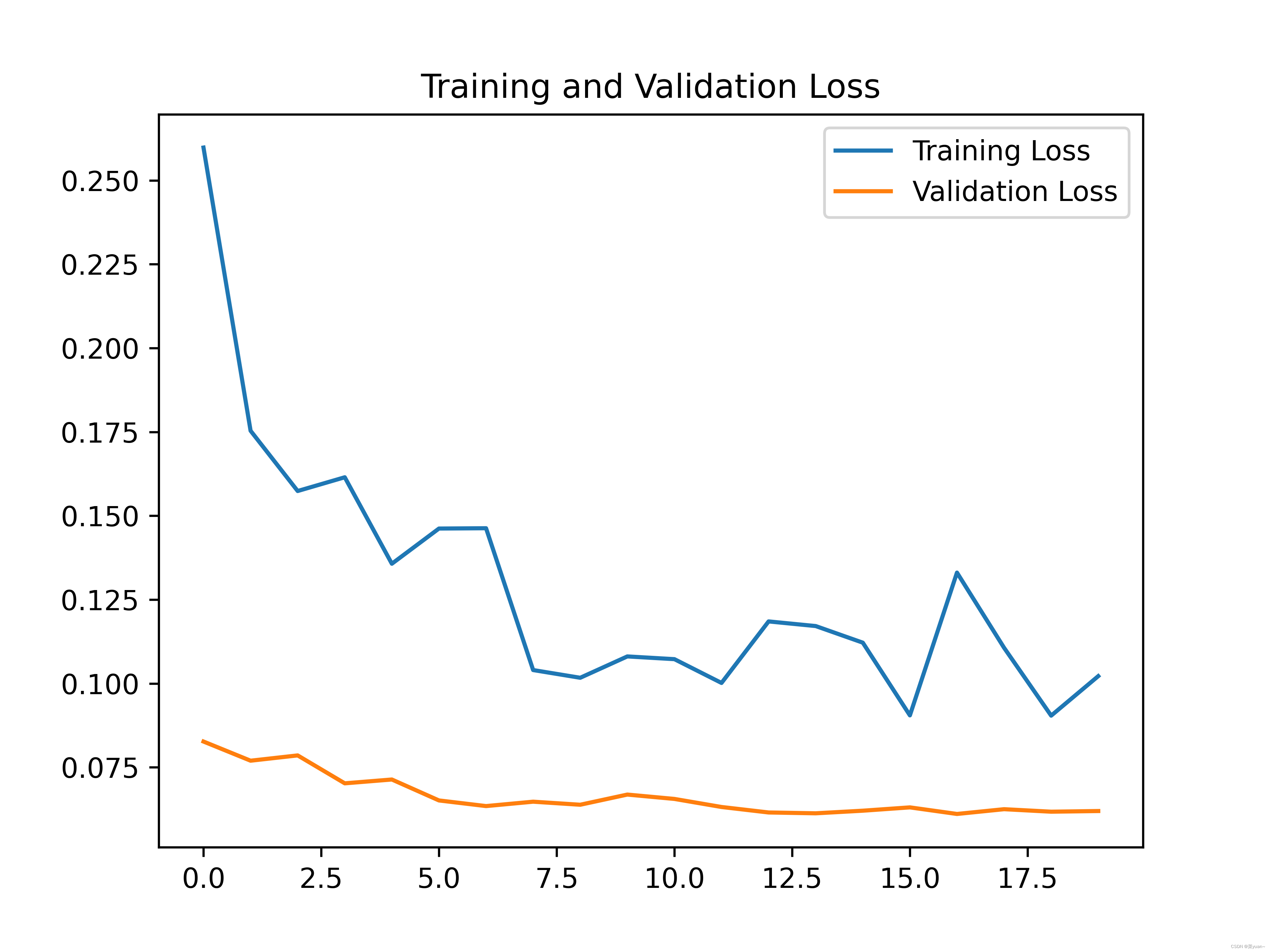
可以发现,通过迁移学习之后的模型准确率达到了96%。





![[nlp] TF-IDF算法介绍](https://img-blog.csdnimg.cn/4e186ba8072d46ecac7be6eda9f882ba.png)