VGG卷积神经网络-笔记
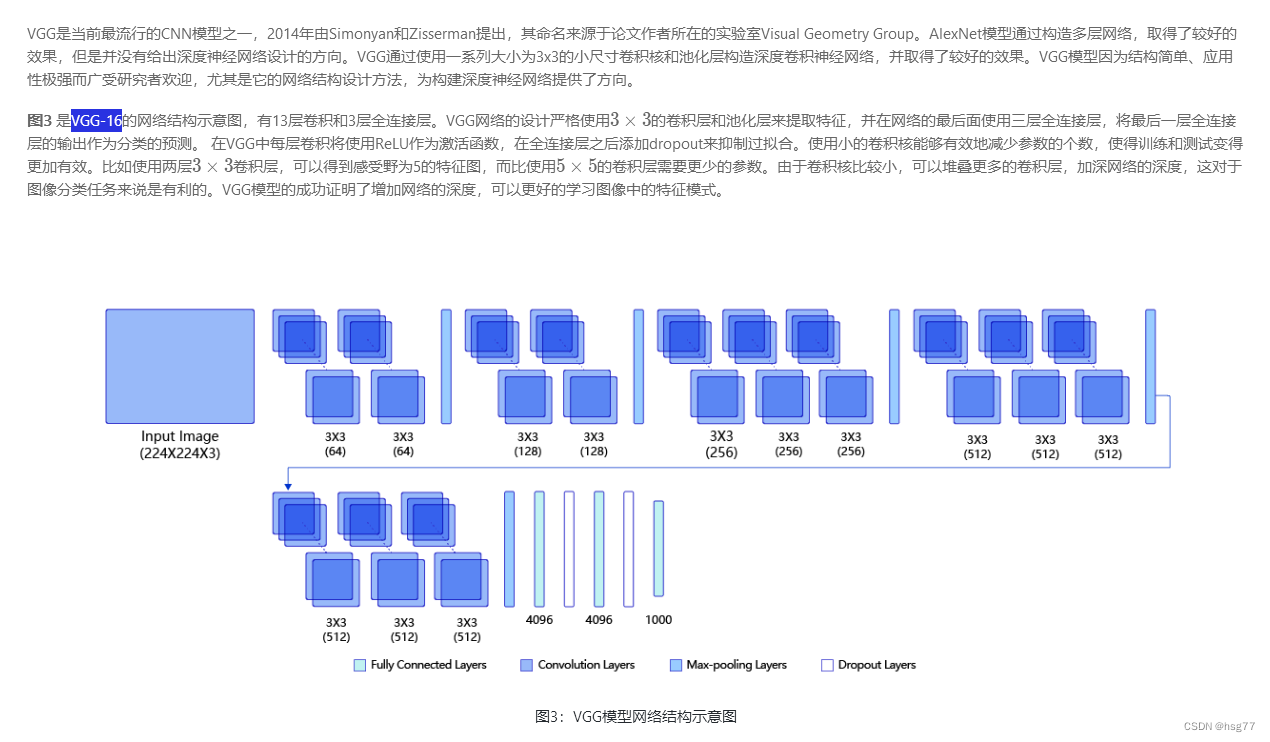
VGG是当前最流行的CNN模型之一,
2014年由Simonyan和Zisserman提出,
其命名来源于论文作者所在的实验室Visual Geometry Group。
测试结果为:
通过运行结果可以发现,在眼疾筛查数据集iChallenge-PM上使用VGG,loss能有效的下降,
经过5个epoch的训练,在验证集上的准确率可以达到94%左右。
实测准确率为0.94左右
[validation] accuracy/loss: 0.9400/0.1871
PS E:\project\python> & D:/ProgramData/Anaconda3/python.exe e:/project/python/PM/VGG_PM.py
W0803 17:19:47.159580 3832 gpu_resources.cc:61] Please NOTE: device: 0, GPU Compute Capability: 6.1, Driver API Version: 12.2, Runtime API Version: 10.2
W0803 17:19:47.168586 3832 gpu_resources.cc:91] device: 0, cuDNN Version: 7.6.
start training ...
epoch: 0, batch_id: 0, loss is: 0.7140
epoch: 0, batch_id: 20, loss is: 0.6399
[validation] accuracy/loss: 0.8675/0.3249
epoch: 1, batch_id: 0, loss is: 0.2456
epoch: 1, batch_id: 20, loss is: 0.3115
[validation] accuracy/loss: 0.9250/0.2395
epoch: 2, batch_id: 0, loss is: 0.2267
epoch: 2, batch_id: 20, loss is: 0.1179
[validation] accuracy/loss: 0.9050/0.3038
epoch: 3, batch_id: 0, loss is: 0.2367
epoch: 3, batch_id: 20, loss is: 0.3747
[validation] accuracy/loss: 0.9200/0.2123
epoch: 4, batch_id: 0, loss is: 0.3089
epoch: 4, batch_id: 20, loss is: 0.0130
[validation] accuracy/loss: 0.9400/0.1871
VGG网格 子图层结构
[Conv2D(3, 64, kernel_size=[3, 3], padding=1, data_format=NCHW),
Conv2D(64, 64, kernel_size=[3, 3], padding=1, data_format=NCHW),
MaxPool2D(kernel_size=2, stride=2, padding=0), Conv2D(64, 128, kernel_size=[3, 3], padding=1, data_format=NCHW),
Conv2D(128, 128, kernel_size=[3, 3], padding=1, data_format=NCHW),
MaxPool2D(kernel_size=2, stride=2, padding=0), Conv2D(128, 256, kernel_size=[3, 3], padding=1, data_format=NCHW),
Conv2D(256, 256, kernel_size=[3, 3], padding=1, data_format=NCHW),
Conv2D(256, 256, kernel_size=[3, 3], padding=1, data_format=NCHW),
MaxPool2D(kernel_size=2, stride=2, padding=0), Conv2D(256, 512, kernel_size=[3, 3], padding=1, data_format=NCHW),
Conv2D(512, 512, kernel_size=[3, 3], padding=1, data_format=NCHW),
Conv2D(512, 512, kernel_size=[3, 3], padding=1, data_format=NCHW),
MaxPool2D(kernel_size=2, stride=2, padding=0), Conv2D(512, 512, kernel_size=[3, 3], padding=1, data_format=NCHW),
Conv2D(512, 512, kernel_size=[3, 3], padding=1, data_format=NCHW),
Conv2D(512, 512, kernel_size=[3, 3], padding=1, data_format=NCHW),
MaxPool2D(kernel_size=2, stride=2, padding=0), Linear(in_features=25088, out_features=4096, dtype=float32),
ReLU(),
Dropout(p=0.5, axis=None, mode=upscale_in_train), Linear(in_features=4096, out_features=4096, dtype=float32),
ReLU(),
Dropout(p=0.5, axis=None, mode=upscale_in_train), Linear(in_features=4096, out_features=1, dtype=float32)](10, 3, 224, 224)
[10, 3, 224, 224]
#VGG网格 子图层shape[N,Cout,H,W],w参数[Cout,Ci,Kh,Kw],b参数[Cout]
conv2d_0 [10, 64, 224, 224] [64, 3, 3, 3] [64]
conv2d_1 [10, 64, 224, 224] [64, 64, 3, 3] [64]
max_pool2d_0 [10, 64, 112, 112]
conv2d_2 [10, 128, 112, 112] [128, 64, 3, 3] [128]
conv2d_3 [10, 128, 112, 112] [128, 128, 3, 3] [128]
max_pool2d_1 [10, 128, 56, 56]
conv2d_4 [10, 256, 56, 56] [256, 128, 3, 3] [256]
conv2d_5 [10, 256, 56, 56] [256, 256, 3, 3] [256]
conv2d_6 [10, 256, 56, 56] [256, 256, 3, 3] [256]
max_pool2d_2 [10, 256, 28, 28]
conv2d_7 [10, 512, 28, 28] [512, 256, 3, 3] [512]
conv2d_8 [10, 512, 28, 28] [512, 512, 3, 3] [512]
conv2d_9 [10, 512, 28, 28] [512, 512, 3, 3] [512]
max_pool2d_3 [10, 512, 14, 14]
conv2d_10 [10, 512, 14, 14] [512, 512, 3, 3] [512]
conv2d_11 [10, 512, 14, 14] [512, 512, 3, 3] [512]
conv2d_12 [10, 512, 14, 14] [512, 512, 3, 3] [512]
max_pool2d_4 [10, 512, 7, 7]
linear_0 [10, 4096] [25088, 4096] [4096]
re_lu_0 [10, 4096]
dropout_0 [10, 4096]
linear_1 [10, 4096] [4096, 4096] [4096]
re_lu_1 [10, 4096]
dropout_1 [10, 4096]
linear_2 [10, 1] [4096, 1] [1]
PS E:\project\python>
测试源代码如下所示:
# -*- coding:utf-8 -*-# VGG模型代码
import numpy as np
import paddle
# from paddle.nn import Conv2D, MaxPool2D, BatchNorm, Linear
from paddle.nn import Conv2D, MaxPool2D, BatchNorm2D, Linear# 定义vgg网络
class VGG(paddle.nn.Layer):def __init__(self, num_classes=1):super(VGG, self).__init__()in_channels = [3, 64, 128, 256, 512, 512]# 定义第一个block,包含两个卷积self.conv1_1 = Conv2D(in_channels=in_channels[0], out_channels=in_channels[1], kernel_size=3, padding=1, stride=1)self.conv1_2 = Conv2D(in_channels=in_channels[1], out_channels=in_channels[1], kernel_size=3, padding=1, stride=1)self.pool1 = MaxPool2D(stride=2, kernel_size=2)# 定义第二个block,包含两个卷积self.conv2_1 = Conv2D(in_channels=in_channels[1], out_channels=in_channels[2], kernel_size=3, padding=1, stride=1)self.conv2_2 = Conv2D(in_channels=in_channels[2], out_channels=in_channels[2], kernel_size=3, padding=1, stride=1)self.pool2 = MaxPool2D(stride=2, kernel_size=2)# 定义第三个block,包含三个卷积self.conv3_1 = Conv2D(in_channels=in_channels[2], out_channels=in_channels[3], kernel_size=3, padding=1, stride=1)self.conv3_2 = Conv2D(in_channels=in_channels[3], out_channels=in_channels[3], kernel_size=3, padding=1, stride=1)self.conv3_3 = Conv2D(in_channels=in_channels[3], out_channels=in_channels[3], kernel_size=3, padding=1, stride=1)self.pool3 = MaxPool2D(stride=2, kernel_size=2)# 定义第四个block,包含三个卷积self.conv4_1 = Conv2D(in_channels=in_channels[3], out_channels=in_channels[4], kernel_size=3, padding=1, stride=1)self.conv4_2 = Conv2D(in_channels=in_channels[4], out_channels=in_channels[4], kernel_size=3, padding=1, stride=1)self.conv4_3 = Conv2D(in_channels=in_channels[4], out_channels=in_channels[4], kernel_size=3, padding=1, stride=1)self.pool4 = MaxPool2D(stride=2, kernel_size=2)# 定义第五个block,包含三个卷积self.conv5_1 = Conv2D(in_channels=in_channels[4], out_channels=in_channels[5], kernel_size=3, padding=1, stride=1)self.conv5_2 = Conv2D(in_channels=in_channels[5], out_channels=in_channels[5], kernel_size=3, padding=1, stride=1)self.conv5_3 = Conv2D(in_channels=in_channels[5], out_channels=in_channels[5], kernel_size=3, padding=1, stride=1)self.pool5 = MaxPool2D(stride=2, kernel_size=2)# 使用Sequential 将全连接层和relu组成一个线性结构(fc + relu)# 当输入为224x224时,经过五个卷积块和池化层后,特征维度变为[512x7x7]=25088#self.fc1 = paddle.nn.Sequential(paddle.nn.Linear(512 * 7 * 7, 4096), paddle.nn.ReLU())self.fc1 = paddle.nn.Linear(512 * 7 * 7, 4096)self.relu1=paddle.nn.ReLU()self.drop1_ratio = 0.5self.dropout1 = paddle.nn.Dropout(self.drop1_ratio, mode='upscale_in_train')# 使用Sequential 将全连接层和relu组成一个线性结构(fc + relu)#self.fc2 = paddle.nn.Sequential(paddle.nn.Linear(4096, 4096), paddle.nn.ReLU())self.fc2 = paddle.nn.Linear(4096, 4096)self.relu2=paddle.nn.ReLU()self.drop2_ratio = 0.5self.dropout2 = paddle.nn.Dropout(self.drop2_ratio, mode='upscale_in_train')self.fc3 = paddle.nn.Linear(4096, 1)#self.relu = paddle.nn.ReLU()#self.pool = MaxPool2D(stride=2, kernel_size=2)def forward(self, x):x = self.relu1(self.conv1_1(x))x = self.relu1(self.conv1_2(x))x = self.pool1(x)x = self.relu1(self.conv2_1(x))x = self.relu1(self.conv2_2(x))x = self.pool2(x)x = self.relu1(self.conv3_1(x))x = self.relu1(self.conv3_2(x))x = self.relu1(self.conv3_3(x))x = self.pool3(x)x = self.relu1(self.conv4_1(x))x = self.relu1(self.conv4_2(x))x = self.relu1(self.conv4_3(x))x = self.pool4(x)x = self.relu1(self.conv5_1(x))x = self.relu1(self.conv5_2(x))x = self.relu1(self.conv5_3(x))x = self.pool5(x)x = paddle.flatten(x, 1, -1)x = self.dropout1(self.relu1(self.fc1(x)))x = self.dropout2(self.relu2(self.fc2(x)))x = self.fc3(x)return x
#
import PM
# 创建模型
model = VGG()
# opt = paddle.optimizer.Adam(learning_rate=0.001, parameters=model.parameters())
opt = paddle.optimizer.Momentum(learning_rate=0.001, momentum=0.9, parameters=model.parameters())# 启动训练过程
PM.train_pm(model, opt) # 输入数据形状是 [N, 3, H, W]
# 这里用np.random创建一个随机数组作为输入数据
x = np.random.randn(*[10,3,224,224])
x = x.astype('float32')
# 创建CNN类的实例,指定模型名称和分类的类别数目
#model = VGG(1)
#
PM.DisplayCNN_layers(model,x)
#
PM.py源代码
#数据处理
#==============================================================================================
import cv2
import random
import numpy as np
import os
from paddle.nn import Conv2D, MaxPool2D, Linear, Dropout
## 组网
import paddle.nn.functional as F# 对读入的图像数据进行预处理
def transform_img(img):# 将图片尺寸缩放道 224x224img = cv2.resize(img, (224, 224))# 读入的图像数据格式是[H, W, C]# 使用转置操作将其变成[C, H, W]img = np.transpose(img, (2,0,1))img = img.astype('float32')# 将数据范围调整到[-1.0, 1.0]之间img = img / 255.img = img * 2.0 - 1.0return img# 定义训练集数据读取器
def data_loader(datadir, batch_size=10, mode = 'train'):# 将datadir目录下的文件列出来,每条文件都要读入filenames = os.listdir(datadir)def reader():if mode == 'train':# 训练时随机打乱数据顺序random.shuffle(filenames)batch_imgs = []batch_labels = []for name in filenames:filepath = os.path.join(datadir, name)img = cv2.imread(filepath)img = transform_img(img)if name[0] == 'H' or name[0] == 'N':# H开头的文件名表示高度近似,N开头的文件名表示正常视力# 高度近视和正常视力的样本,都不是病理性的,属于负样本,标签为0label = 0elif name[0] == 'P':# P开头的是病理性近视,属于正样本,标签为1label = 1else:raise('Not excepted file name')# 每读取一个样本的数据,就将其放入数据列表中batch_imgs.append(img)batch_labels.append(label)if len(batch_imgs) == batch_size:# 当数据列表的长度等于batch_size的时候,# 把这些数据当作一个mini-batch,并作为数据生成器的一个输出imgs_array = np.array(batch_imgs).astype('float32')labels_array = np.array(batch_labels).astype('float32').reshape(-1, 1)yield imgs_array, labels_arraybatch_imgs = []batch_labels = []if len(batch_imgs) > 0:# 剩余样本数目不足一个batch_size的数据,一起打包成一个mini-batchimgs_array = np.array(batch_imgs).astype('float32')labels_array = np.array(batch_labels).astype('float32').reshape(-1, 1)yield imgs_array, labels_arrayreturn reader# 定义验证集数据读取器
def valid_data_loader(datadir, csvfile, batch_size=10, mode='valid'):# 训练集读取时通过文件名来确定样本标签,验证集则通过csvfile来读取每个图片对应的标签# 请查看解压后的验证集标签数据,观察csvfile文件里面所包含的内容# csvfile文件所包含的内容格式如下,每一行代表一个样本,# 其中第一列是图片id,第二列是文件名,第三列是图片标签,# 第四列和第五列是Fovea的坐标,与分类任务无关# ID,imgName,Label,Fovea_X,Fovea_Y# 1,V0001.jpg,0,1157.74,1019.87# 2,V0002.jpg,1,1285.82,1080.47# 打开包含验证集标签的csvfile,并读入其中的内容filelists = open(csvfile).readlines()def reader():batch_imgs = []batch_labels = []for line in filelists[1:]:line = line.strip().split(',')name = line[1]label = int(line[2])# 根据图片文件名加载图片,并对图像数据作预处理filepath = os.path.join(datadir, name)img = cv2.imread(filepath)img = transform_img(img)# 每读取一个样本的数据,就将其放入数据列表中batch_imgs.append(img)batch_labels.append(label)if len(batch_imgs) == batch_size:# 当数据列表的长度等于batch_size的时候,# 把这些数据当作一个mini-batch,并作为数据生成器的一个输出imgs_array = np.array(batch_imgs).astype('float32')labels_array = np.array(batch_labels).astype('float32').reshape(-1, 1)yield imgs_array, labels_arraybatch_imgs = []batch_labels = []if len(batch_imgs) > 0:# 剩余样本数目不足一个batch_size的数据,一起打包成一个mini-batchimgs_array = np.array(batch_imgs).astype('float32')labels_array = np.array(batch_labels).astype('float32').reshape(-1, 1)yield imgs_array, labels_arrayreturn reader# -*- coding: utf-8 -*-
# 识别眼疾图片
import os
import random
import paddle
import numpy as npDATADIR = './PM/palm/PALM-Training400/PALM-Training400'
DATADIR2 = './PM/palm/PALM-Validation400'
CSVFILE = './PM/labels.csv'
# 设置迭代轮数
EPOCH_NUM = 5# 定义训练过程
def train_pm(model, optimizer):# 开启0号GPU训练use_gpu = Truepaddle.device.set_device('gpu:0') if use_gpu else paddle.device.set_device('cpu')print('start training ... ')model.train()# 定义数据读取器,训练数据读取器和验证数据读取器train_loader = data_loader(DATADIR, batch_size=10, mode='train')valid_loader = valid_data_loader(DATADIR2, CSVFILE)for epoch in range(EPOCH_NUM):for batch_id, data in enumerate(train_loader()):x_data, y_data = dataimg = paddle.to_tensor(x_data)label = paddle.to_tensor(y_data)#print('image.shape=',img.shape)# 运行模型前向计算,得到预测值logits = model(img)loss = F.binary_cross_entropy_with_logits(logits, label)avg_loss = paddle.mean(loss)if batch_id % 20 == 0:print("epoch: {}, batch_id: {}, loss is: {:.4f}".format(epoch, batch_id, float(avg_loss.numpy())))# 反向传播,更新权重,清除梯度avg_loss.backward()optimizer.step()optimizer.clear_grad()model.eval()accuracies = []losses = []for batch_id, data in enumerate(valid_loader()):x_data, y_data = dataimg = paddle.to_tensor(x_data)label = paddle.to_tensor(y_data)# 运行模型前向计算,得到预测值logits = model(img)# 二分类,sigmoid计算后的结果以0.5为阈值分两个类别# 计算sigmoid后的预测概率,进行loss计算pred = F.sigmoid(logits)loss = F.binary_cross_entropy_with_logits(logits, label)# 计算预测概率小于0.5的类别pred2 = pred * (-1.0) + 1.0# 得到两个类别的预测概率,并沿第一个维度级联pred = paddle.concat([pred2, pred], axis=1)acc = paddle.metric.accuracy(pred, paddle.cast(label, dtype='int64'))accuracies.append(acc.numpy())losses.append(loss.numpy())print("[validation] accuracy/loss: {:.4f}/{:.4f}".format(np.mean(accuracies), np.mean(losses)))model.train()paddle.save(model.state_dict(), 'palm.pdparams')paddle.save(optimizer.state_dict(), 'palm.pdopt')
# 定义评估过程
def evaluation(model, params_file_path):# 开启0号GPU预估use_gpu = Truepaddle.device.set_device('gpu:0') if use_gpu else paddle.device.set_device('cpu')print('start evaluation .......')#加载模型参数model_state_dict = paddle.load(params_file_path)model.load_dict(model_state_dict)model.eval()eval_loader = data_loader(DATADIR, batch_size=10, mode='eval')acc_set = []avg_loss_set = []for batch_id, data in enumerate(eval_loader()):x_data, y_data = dataimg = paddle.to_tensor(x_data)label = paddle.to_tensor(y_data)y_data = y_data.astype(np.int64)label_64 = paddle.to_tensor(y_data)# 计算预测和精度prediction, acc = model(img, label_64)# 计算损失函数值loss = F.binary_cross_entropy_with_logits(prediction, label)avg_loss = paddle.mean(loss)acc_set.append(float(acc.numpy()))avg_loss_set.append(float(avg_loss.numpy()))# 求平均精度acc_val_mean = np.array(acc_set).mean()avg_loss_val_mean = np.array(avg_loss_set).mean()print('loss={:.4f}, acc={:.4f}'.format(avg_loss_val_mean, acc_val_mean))
#==============================================================================================
#定义显示CNN模型参数结构
#======================================================
def DisplayCNN_layers(model,x):# 通过调用CNN从基类继承的sublayers()函数,# 查看CNN中所包含的子层print(model.sublayers())print(x.shape)x = paddle.to_tensor(x)print(x.shape)for item in model.sublayers():# item是CNN类中的一个子层# 查看经过子层之后的输出数据形状try:x = item(x)except:x = paddle.reshape(x, [x.shape[0], -1])x = item(x)if len(item.parameters())==2:# 查看卷积和全连接层的数据和参数的形状,# 其中item.parameters()[0]是权重参数w,item.parameters()[1]是偏置参数bprint(item.full_name(), x.shape, item.parameters()[0].shape, item.parameters()[1].shape)else:# 池化层没有参数print(item.full_name(), x.shape)
#======================================================