文章目录
- 前言
- 调度器
- 初始化
- evaluate
- wait
- update
- notify
- delta notification
- time notification
- 仿真结束
前言
SystemC是基于C++的库,主要用来对 IC 进行功能建模和性能建模。有时也被用来当做 RTL (register transfer level) 级的升级版 HLS(High Level synthesis) 直接用来表达设计,但是主流 EDA 对 SystemC 综合支持不够好,目前已经很少被用来当做设计语言搞了。有时候 SystemC 也会用来在 design verification 中当做 reference model 来使用,但是因为 SystemC module之间连接必须使用 channel,而 channel 在实现上是类似于 verilog reg 的一种方式,而没有对应的 verilog wire 类型的 channel ,所以在 module 划分时 SystemC module 和 verilog module 在实现上很难对应,使用 systemverilog 是一种更好的方式。
下面主要讨论 SystemC 的调度器,它在运行过程中是怎样控制我们的代码执行。其他比较基础的问题不在下面的讨论范畴中。
调度器
在 SystemC 中 sc_main 作为程序的入口,它类似于 C 语言中的 main,作为用户代码的入口,在他们前面还有一些库的代码作为整个程序的入口,这个请参考其他资料。
在 sc_main 中首先例化我们的 sc_module,连接各种模块,最后调用 sc_start 来开始仿真。在 sc_start 之前的阶段称为 Elaboration,类似于 verilog 中的 elaboration,将所有的 sc_module 都当做硬件摆放,并且检查 module 之间的连线关系。因为 sc_in/sc_out 都实现了sc_signal_in_if/sc_signal_out_if 接口,它的接口中实现访问连接它绑定的 channel 资源,通常是 sc_signal, 如果没有 bind,一旦操作它就会出现空指针的问题,所以在 sc module 连接时不允许接口悬空或者宽度不匹配,这个纯粹是 SystemC 库实现的问题,官方不支持我们也没办法。当所有 sc_module 的展开都没有问题时,整个系统的 hierarchy 就是固定了,可以启动整个硬件系统的。
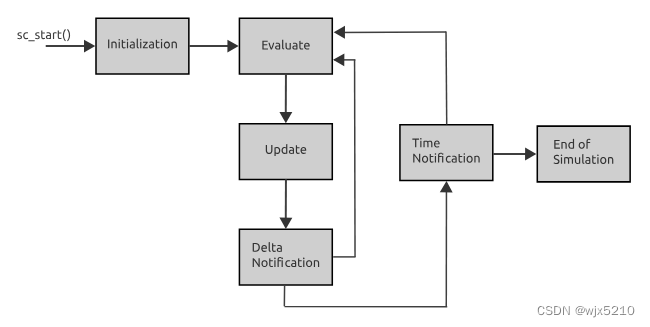
在 sc_start 之后,它首先进行初始化,然后循环执行 evaluate-> update -> delta notification, time notification, 最后没有就绪的任务、超时或者主动结束(sc_stop)。 在仿真结束阶段进行
首先我们需要澄清两个时间:
仿真时间: 仿真程序中自己的时间精读,类似于一个虚拟世界中的世界。可能物理计算机已经跑了10分钟,但是虚拟世界中的时钟才跑了100us,我们分析仿真功能时一般使用仿真时间。
仿真程序运行时间: 仿真程序相对于真实世界运行的时间,例如这个程序运行了10s才结束,对于仿真内部是没有任何影响的,它只作为我们评判仿真程序性能的标准。
下面我们分别解释其中的几个 phase 或者称为 stage.
初始化
模拟内核识别所有模拟进程并将它们放置在可运行或等待进程集中。除那些请求“dont_initialize”的模拟进程(也包括 METHOD)外,所有模拟进程均处于可运行集中。
除此之外,我们的模拟工具还将为我们创建的任何变量分配初始值。这包括我们在模块内部声明的任何信号。从广义上讲,我们可以将初始化阶段视为大致相当于重置整个电路,所以有些设计省略了 reset 信号而是使用初始化赋值的方式来进行复位,这种方式只在仿真中可以使用。
在我们开始运行模拟之前,初始化阶段使我们的设计进入已知状态。
SystemC 是一个单线程、单进程的程序,虽然有SC_THREAD, 但是它是一种相当于协程任务的存在,所有的SC_THREAD/METHOD都是串行执行的。
evaluate
在 evaluate 阶段,模拟内核执行每个module 中的每个 thread/method。我们的thread/method 并非全部并行运行,模拟器一次只运行一个thread/method。下面我们将thread/method和其他所有的变种都称为任务。
模拟器运行每个进程,直到 return、执行任务中的最后一条语句或调用 wait()。 模拟器要么在到达 wait() 语句时挂起任务,要么在到达任务末尾或 return 语句时终止它们。
任务被挂起或终止后,调度程序将开始执行我们设计中的下一个任务。
调度程序重复此操作,直到我们设计中的所有进程都以这种方式执行。
此时,调度程序进入 update 阶段。
wait
wait 方法是 evaluate 阶段的重要组成部分,因为它确定 task 何时被挂起然后进入 update 阶段。
wait() 是在等待事件,事件在 SystemC 中有几种方式指定: 静态敏感列表 和 动态敏感列表,下表中列出了wait 使用不同的参数时的用法。
| Syntax | Function |
|---|---|
| wait() | Suspend the thread until an event occurs on one of the signals in the sensitivity list (static sensitivity). |
| wait(n) | Suspend the thread until events occur on one of the signals in the sensitivity list |
| wait(e1) | Suspend the thread until the event e1 is active. |
| wait(n, SC_NS) | Suspend the thread for ns. We can also pass a time object to the method to make it wait for a given period. |
| wait(n, SC_NS, e1) | Suspend the thread either until event e1 is active or for ns, whichever is the shortest. |
// Wait for a single event
wait()// Wait for 2 events
wait(2);// Wait for event e1 (this is generated in event_schedule)
wait(e1);// Wait for 10ns
wait(10, SC_NS);// Wait for 20ns (using time object)
sc_time t_20ns(20, SC_NS);
wait(t_20ns);
wait(20, SC_NS);// Wait for event e2 or 50ns
wait(50, SC_NS, e2);
update
一旦 evaluate 阶段完成执行,调度程序就会进入更新阶段。
为了正确模拟数字电路的行为,SystemC 模拟器在 evaluate 阶段创建更新请求。
每当模拟器在运行 evaluate 阶段时遇到信号赋值时,它就会标记创建这些更新请求。
此时,模拟器不会为我们的信号分配新值。 相反,我们的模拟器使用信号的原始值执行 evaluate 阶段的其余部分。
完成 evaluate 阶段后,调度程序将进入update 阶段,在该阶段它将处理所有更新请求。
结果,所有被分配值的信号在更新阶段而不是在evaluate阶段被更新为该新值。
在实现所有更新请求后,更新阶段完成,然后模拟器进入 delta notification 状态。
为了了解更新请求的工作原理,让我们看一个简单的示例。
对于这个例子,让我们看一下简单的扭曲环形计数器电路,如下所示。
一个简单的扭环式计数器电路
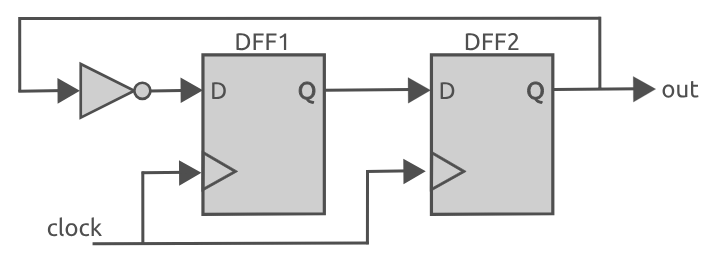
下面的代码片段显示了我们如何在 SystemC 中对该电路进行建模。
dff1.write( ~dff2.read() );
dff2.write( dff1.read() );
首先,让我们看看信号在分配后立即更新时的行为。 这是我们在传统编程语言中所期望的行为。
假设时钟边沿出现时两个触发器的输出均为 0。 由于上面代码中第 1 行的结果,DFF1 的输出更改为 1。然后我们可以看到下一行代码会将 DFF2 的输出设置为 1。
这显然不是我们正在建模的电路的预期行为。 相反,我们预计 DFF2 保持为 0,DFF1 更改为 1。
现在让我们考虑一下使用更新请求后模型的行为如何。
模拟器首先执行更新DFF1的语句并为此信号创建更新请求。 调度程序创建此更新请求的方式是将 DFF1 的输出更新为 1b。
然后,模拟器使用 DFF1 触发器的原始值运行第二行代码,并为 DFF2 的输出创建更新请求。 由于此时 DFF1 仍设置为 0b,因此调度程序创建一个更新请求,将 DFF2 的输出更新为 0b。
由于此设计中只有两个语句,因此评估阶段现已完成,调度程序进入更新阶段。
在更新阶段,模拟器执行它在评估阶段创建的 2 个更新请求。 执行更新请求后,DFF1 的值为 1b,DFF2 的值为 0b。
notify
在更新阶段,我们使用通知方法告诉模拟器信号值已更改。
这意味着通知方法对于控制我们设计中的信号如何更新非常重要。
在大多数情况下,我们实际上不需要在设计中直接调用notify方法。
原因是我们在 SystemC 中使用的许多数据类型和信号都是作为类实现的。 大多数情况下,这些类会在需要时自动为我们调用notify方法。
例如,当我们使用sc_fifo、sc_mutex或sc_signal时,所有这些类都为我们实现了notify方法。 因此,当我们想要更新任何使用这些类型的变量时,我们不需要手动调用通知方法。
然而,如果我们想在SystemC中编写自己的分层通道,那么我们可能需要在代码中手动调用notify方法。
我们实际上可以使用notify方法来创建三种不同类型的通知。 我们的调度程序将在不同阶段处理每个不同的通知。
下表总结了我们可以使用notify方法创建的三种不同类型的通知。
| Syntax | Function |
|---|---|
| notify() | We use the notify method without any arguments to create an immediate notification. These are implemented in immediately. |
| notify(SC_ZERO_TIME) | When we use the notify method together with the SC_ZERO_TIME constant we create a delta notification. These are implemented during the delta notification phase. |
| notify(n, SC_NS) | |
| We create a time notification by passing a time argument to the notify method. We can also pass a time object to create a time notification. These are implemented during the time notification phase. |
// Create an immediate notification
e1.notfy();// Create a delta notificatione1.notify(SC_ZERO_TIME);// Create a time notification (in this case 10ns)
e1.notify(10, SC_NS);
delta notification
一旦更新阶段完成为我们设计中的信号分配新值,调度程序就会进入增量通知阶段。
正如我们在更新阶段部分中讨论的那样,我们可以使用 notification() 方法来创建增量通知。
然后,增量通知阶段负责处理这些通知。
为此,我们的模拟器会计算出哪些进程受到增量通知的影响。
例如,假设我们正在对一个简单的电路进行建模,如下所示。
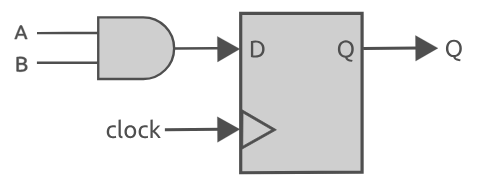
显示两个输入与门的电路图,其中与门的输出是 D 型触发器的输入
现在假设在评估阶段,与门的输出改变值。 由于此更改,模拟器会在更新阶段发出增量通知。
在增量通知阶段,模拟器确定哪些进程受到此值更改的影响。 在这种情况下,增量通知会影响对触发器进行建模的过程
一旦模拟器确定哪些进程受到增量通知的影响,它就会将这些进程标记为可运行。
调度程序以这种方式完成所有增量通知的处理后返回到评估阶段。
然后模拟器将再次执行它标记为可运行的所有进程。
如果没有需要处理的增量通知,SystemC 调度程序将直接进入时间通知阶段。
time notification
在执行给定时间步长的所有增量周期后,调度程序将进入时间通知阶段。
正如我们在更新阶段部分中讨论的那样,我们可以使用 notification() 方法来创建时间通知。
处理这些时间通知是时间通知阶段的责任。
为此,调度程序会分析该时间步期间发出的所有时间通知。
然后,调度程序根据请求的超时持续时间组织这些通知。
例如,如果我们有 3 个时间通知,分别为 1ms、5ns 和 10ns,那么调度程序会按照从最短到最长的顺序组织它们。 在这种情况下,我们的调度程序将按照 5ns、10ns 和 1ms 的顺序组织它们。
一旦调度程序以这种方式完成时间通知的组织,它就会将模拟时间提前到下一个最早的时间步长。
例如,如果我们有 3 个 5ns、10ns 和 1ms 的时间通知,那么调度程序会将模拟时间提前 5ns。
在调度程序以这种方式处理完所有时间通知后,调度程序返回到评估阶段。 然后,调度程序将在下一个时间步骤中再次运行整个周期。
仿真结束
仿真结束时,它会清理资源,例如关闭打开的文件,释放申请的内存,析构object等操作。这部分对于程序分析比较重要,例如仿真程序是否存在内存泄露问题影响稳定性,对于仿真功能已经没什么影响了。
另外 SystemC 提供给用户 callback 在这阶段实现一些自定义操作: end_of_simulation(), 一般可以用来报告仿真程序的统计信息。




![[Docker实现测试部署CI/CD----相关服务器的安装配置(1)]](https://img-blog.csdnimg.cn/9e7ad5a161f04bde904fe539e623036b.png)