大家好,我是虎哥,今天远程帮助几个小伙伴在A200 控制器上安装PyTorch v1.9.0 torchvision v0.10.0,中间也是经历了很多波折,当然,大部分是网络问题和版本适配问题,所以完事后,将自己完整可用的过程做个记录,分享给大家。我的硬件环境是A200控制器。核心是TX1,系统环境是:jetpack4.6.2 Ubuntu18.04,大家注意对应和区分。
目录
一、PyTorch 介绍
PyTorch的特性
二、安装环境确认说明
1.1 确认系统版本
1.2 确认L4T版本版本
1.3 确认Jetson版本
1.4 PYthon 版本:
三、安装环境步骤
3.1 PyTorch for Jetson v1.9.0下载安装
3.2 安装 torchvision v0.10.0
1、调大一些环境参数
2、调高虚拟内存,建议总内存至少大于10G
3、源码编译安装
3.3 验证安装
四、总结
一、PyTorch 介绍

Pytorch是torch的python版本,是由Facebook开源的神经网络框架,专门针对 GPU 加速的深度神经网络(DNN)编程。Torch 是一个经典的对多维矩阵数据进行操作的张量(tensor )库,在机器学习和其他数学密集型应用有广泛应用。与Tensorflow的静态计算图不同,pytorch的计算图是动态的,可以根据计算需要实时改变计算图。但由于Torch语言采用 Lua,导致在国内一直很小众,并逐渐被支持 Python 的 Tensorflow 抢走用户。作为经典机器学习库 Torch 的端口,PyTorch 为 Python 语言使用者提供了舒适的写代码选择。著名的avatarify(替身)的python版本是用pytorch实现的,项目见:https://github.com/alievk/avata
其官网入口为:https://pytorch.org/
中文教程入口:https://pytorch.apachecn.org/#/docs/1.4/README
PyTorch既可以看做加入了GPU支持的numpy,同时也可以看成一个拥有自动求导功能的强大的深度神经网络,除了Facebook之外,它还已经被Twitter、CMU和Salesforce等机构采用。
TensorFlow和Caffe都是命令式的编程语言,而且是静态的,首先必须构建一个神经网络,然后一次又一次使用相同的结构,如果想要改 变网络的结构,就必须从头开始。但是对于PyTorch,通过反向求导技术,可以让你零延迟地任意改变神经网络的行为,而且其实现速度 快。正是这一灵活性是PyTorch对比TensorFlow的最大优势。
另外,PyTorch的代码对比TensorFlow而言,更加简洁直观,底层代码也更容易看懂,这对于使用它的人来说理解底层肯定是一件令人激 动的事。所以,总结一下PyTorch的优点:
-
支持GPU
-
灵活,支持动态神经网络
-
底层代码易于理解
-
命令式体验
-
自定义扩展
当然,现今任何一个深度学习框架都有其缺点,PyTorch也不例外,对比TensorFlow,其全面性处于劣势,目前PyTorch还不支持快速傅里 叶、沿维翻转张量和检查无穷与非数值张量;针对移动端、嵌入式部署以及高性能服务器端的部署其性能表现有待提升;其次因为这个框 架较新,使得他的社区没有那么强大,在文档方面其C库大多数没有文档。
PyTorch的特性
PyTorch的祖先是Chainer,HIPS autograd,twitter-autograd.
这些库有以下两个鲜明的特征:
动态的,运行时定义:一个动态框架仅仅通过运行期望的操作来对函数求导,这与实现一个预先符号求导的静态的图结构再多次运行的方式恰恰相反。这样一来就允许用户使用任何想要的宿主语言特性(如各种控制流结构),以每次迭代都要求执行的求导为代价。动态执行将PyTorch和TensorFlow,Caffe这样的静态架构区分开来了。
A dynamic framework defines the function to be differentinated simply by running the desired computation,as opposed to specifying a static graph structure which is differentiated symbolically ahead of time and then run many times.This permits users to use any host-language features they want(e.g.,arbirary control flow constructs),at the cost of requiring differentiation to be carried out every iteration.Dynamic execution distinguishes PyTorch from static frameworks like TensorFlow,Caffe,etc.
简言之,动态计算图不容易优化,当不同输入的网路结构不一致时,难以并行计算,但是灵活性比较高。
立即的,迫切的执行:一个迫切的框架在遇到张量运算时才会运行;它甚至避免去实现一个“前向的图”,仅仅记录下对于求导运算必要的内容。这就站在DyNet的对立面上了,DyNet采用懒评估的方式,在每一次训练迭代中都会真实地重建前向和反向图。立即执行允许CPU和GPU运算被管道化,但是放弃了整个网络进行优化和批处理。
An eager framework runs tensor computations as it encounters them;it avoids ever materializing a "forward graph", recording only what is necessary to differentiate the computation.This stands in contrast to DyNet,which employs lazy evaluation,literally rebuilding the forwards and backwards graph every training iteration.Immediate execution allows CPU and GPU computation to be pipelined,but gives up the opportunity for whole-network optimization and batching.
但是让PyTorch从所有动态迫切执行地自动求导库中成了实现最快的一个,还要依赖于它地以下设计和实现选择:
原地运算:原地运算会给自动求导带来危害,因为原地运算会使得在微分阶段将要用到的数据失效。此外,它们要求执行特殊的tape转换操作。针对这些问题,PyTorch实现了简单但有效的机制。
In-place operations pose a hazard for automatic differentiation,because an in-place operation can invalidate data that would be needed in the differentiation phase.Additionally,they require nontrivial tape transformations to be performed.PyTorch implements simple but effective mechanisms that address both of these problems.
没有tape:传统反转模式求导记录一个tape(也叫Wengert列表),其作用是描述最初的执行操作的顺序,这个优化允许避免一个拓扑分类的实现。PyTorch(以及Chainer)避免了这个tape,取而代之的是,每一个中间结果只记录和它们计算有关子集。这也就意味着PyTorch的用户可以随心所欲地混合与匹配独立的图,以任何想要的方式(没有直接的同步)。以这种方式结构化图的另一个好处是,当图的一部分死去,就会被自动释放,这对于我们想要尽快释放大的内存块来说是一个重要的考虑。
Traditional reverse-mode differentiation records a tape(also known as a Wengert list) describing the order in which operations were originally executed;this optimization allows implementations to avoid a topological sort.PyTorch (and Chainer) eschew this tape;instead,every intermediate result records only the subset of the computation graph that was relevant to their computaion.This means PyTorch users can mix and match indepedent graphs however they like,in whatever threads they like(without explicit synchronization).An added benefit of structuring graphs this way is that when a portion of the graph becomes dead,it is automatically freed;an important consideration when we want to free large memory chunks as quickly as possible.
用C++写核心逻辑:PyTorch起源于Python的库;但是,高昂的转换器消耗对于核心AD逻辑来说很快凸显出来。今天,大多数的核心逻辑都是用C++写的,并且将核心操作定义转化成C++仍在进行中。小心调优的C++代码是PyTorch能够实现相比其他框架低得多的开销的首要愿意。
PyTorch started its life as a Python library;however,it quickly became clear that interpreter overhead is too high for core AD logic.Today,most of it is written in C++,and we are in the process of moving core operator definitions to C++.Carefully tuned C++ code is one of the primary reasons PyTorch can achieve much lower overhead compared to other frameworks.
二、安装环境确认说明
Jetpack默认已安装opencv、cuda、cudnn,故只需再安装pytorch即可,留意jetson是arm架构,需要下载对应的安装文件加以安装
1.1 确认系统版本
sudo lsb_release -a1.2 确认L4T版本版本
head -n 1 /etc/nv_tegra_releasenvidia@TX1-A200:~$ head -n 1 /etc/nv_tegra_release
# R32 (release), REVISION: 7.2, GCID: 30192233, BOARD: t210ref, EABI: aarch64, DATE: Wed Apr 20 21:34:48 UTC 2022说明使用的是jetpack4.6.2。
1.3 确认Jetson版本
jetson_release -v
EdgeBox_tx1_A200 系统 TX1核心,我们已经安装了CUDA、cuDNN、等,具体的安装方法,使用官方对应的工具刷机安装,具体可以参考之前的文章。
https://blog.csdn.net/cau_weiyuhu/article/details/128026029
https://blog.csdn.net/cau_weiyuhu/article/details/128152847
1.4 PYthon 版本:
nvidia@nvidia-desktop:~$ python --version
Python 2.7.17
nvidia@nvidia-desktop:~$ python3 --version
Python 3.6.9三、安装环境步骤
TX1专用下载地址,一定和jetpack的版本对应好,但是这个里面有些其实照着装也不能成功,主要是中间有些细节和出现错误后没有说明怎么解决。不过是很重要的参考。
https://forums.developer.nvidia.com/t/pytorch-for-jetson/72048
但是上面的对应关系我自己安装总是在 torchvision出错。所以我决定找找官方容器是怎么安装的搭配的。功夫不负有心人,终于找到了。
网址入口:https://catalog.ngc.nvidia.com/orgs/nvidia/containers/l4t-pytorch
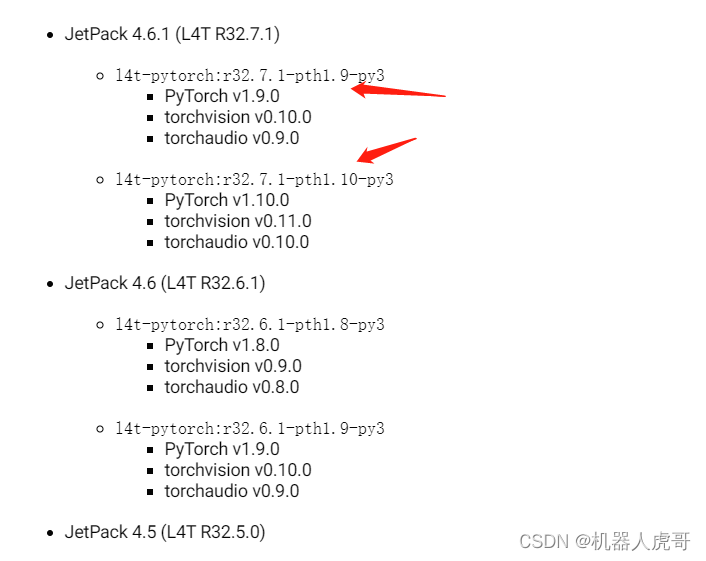
所以其实有好几组版本可以选择,但是一定要找好对应关系,我们自己安装也使用这个搭配来安装:PyTorch v1.9.0 torchvision v0.10.0 按照这个组合试试。虽然只给了4.6.1的版本对应,但是还是在32.7.X的系统下的对应,我们按照这个来就可以。
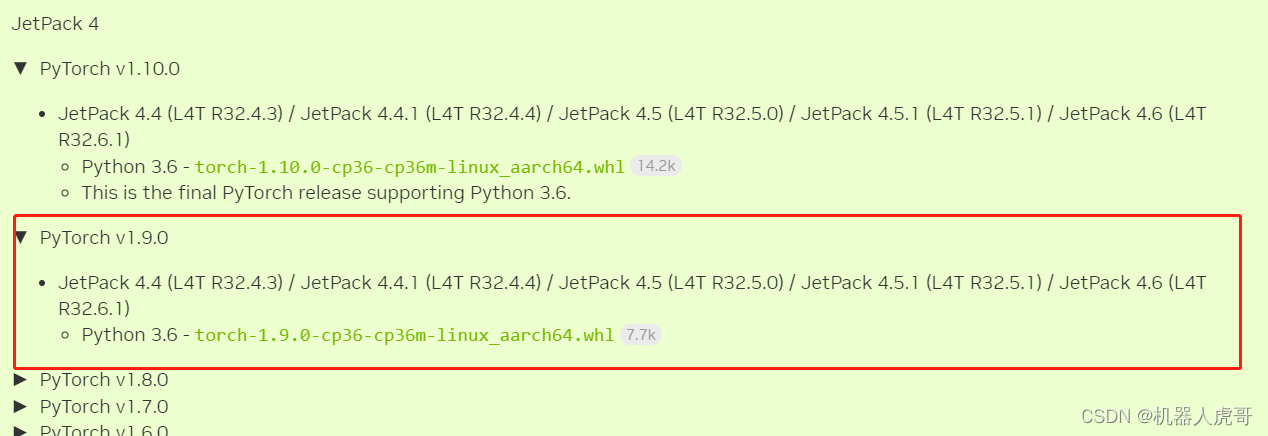
3.1 PyTorch for Jetson v1.9.0下载安装
我们的环境是
Jetpack 4.6.2 [L4T 32.7.2]网址入口:https://forums.developer.nvidia.com/t/pytorch-for-jetson/72048
下载后,拷贝到A200系统。我是在WIN主机上用迅雷下载的。

然后使用TFTP拷贝到了控制器上。

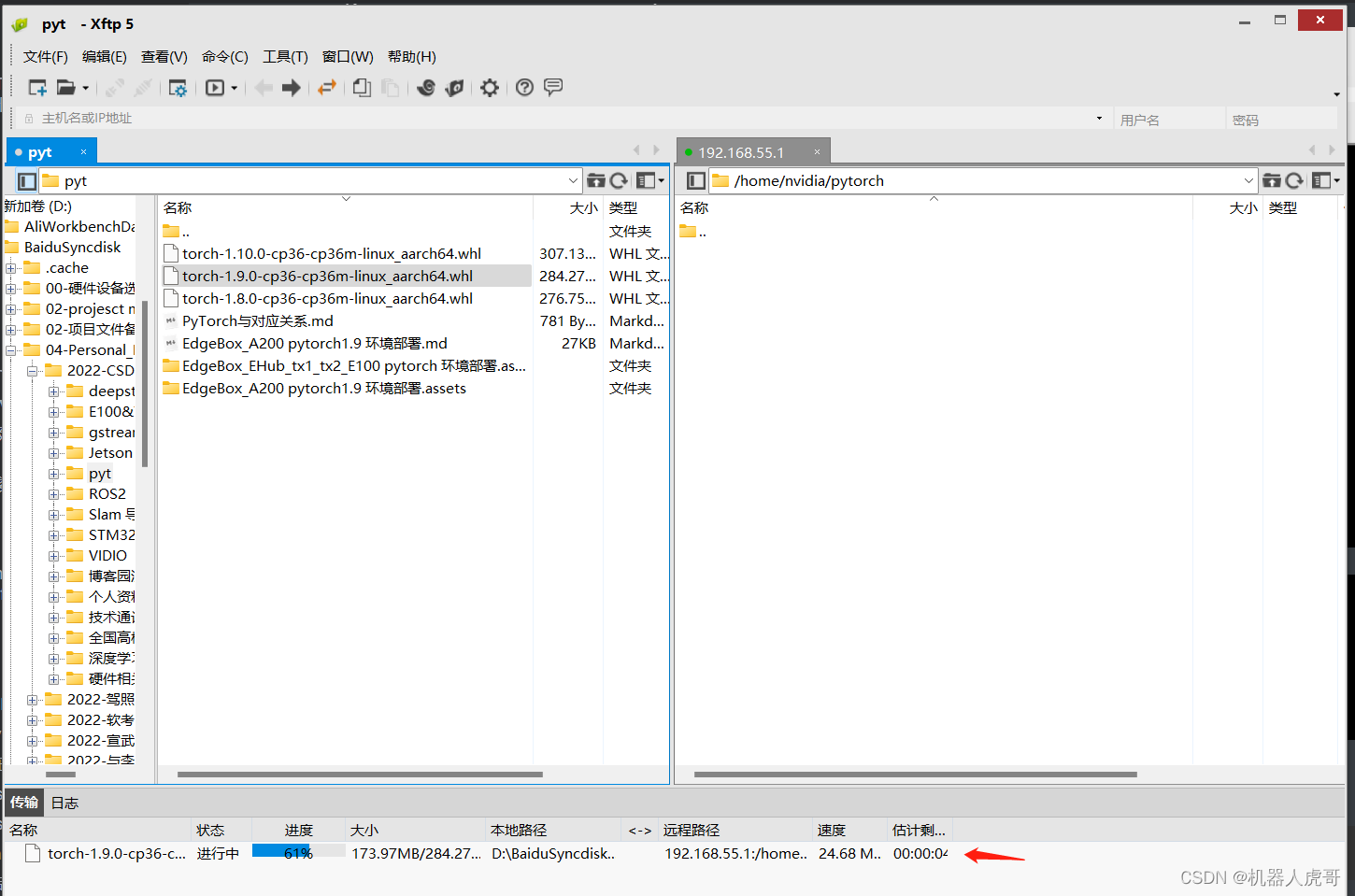

当然也可以再A200控制系统系统内直接用命令下载:
wget https://nvidia.box.com/shared/static/p57jwntv436lfrd78inwl7iml6p13fzh.whl -O torch-1.9.0-cp36-cp36m-linux_aarch64.whl注意:以上下载方法我自己没有实验过去,我是公司网,443端口是封锁的。
安装:
sudo apt-get install python3-pip libopenblas-base libopenmpi-dev libomp-dev
pip3 install Cython
sudo pip3 install numpy torch-1.9.0-cp36-cp36m-linux_aarch64.whl

这个过程如果网不好,可能要多次尝试重复,包括换网等操作。


支持PyTorch v1.9.0安装成功。
3.2 安装 torchvision v0.10.0
1、调大一些环境参数
nvidia@nvidia-desktop:~$ ulimit -a
core file size (blocks, -c) 0
data seg size (kbytes, -d) unlimited
scheduling priority (-e) 0
file size (blocks, -f) unlimited
pending signals (-i) 13929
max locked memory (kbytes, -l) 65536
max memory size (kbytes, -m) unlimited
open files (-n) 1024
pipe size (512 bytes, -p) 8
POSIX message queues (bytes, -q) 819200
real-time priority (-r) 0
stack size (kbytes, -s) 8192
cpu time (seconds, -t) unlimited
max user processes (-u) 13929
virtual memory (kbytes, -v) unlimited
file locks (-x) unlimitedsudo gedit /etc/security/limits.conf #end 后增加这4条 主要是修改 max number of open files
nvidia soft nofile 65535
nvidia hard nofile 65535
root soft nofile 65535
root hard nofile 65535
修改后重启sudo reboot,重启后查看环境量:
nvidia@nvidia-desktop:~$ ulimit -a
core file size (blocks, -c) 0
data seg size (kbytes, -d) unlimited
scheduling priority (-e) 0
file size (blocks, -f) unlimited
pending signals (-i) 13929
max locked memory (kbytes, -l) 65536
max memory size (kbytes, -m) unlimited
open files (-n) 65535
pipe size (512 bytes, -p) 8
POSIX message queues (bytes, -q) 819200
real-time priority (-r) 0
stack size (kbytes, -s) 8192
cpu time (seconds, -t) unlimited
max user processes (-u) 13929
virtual memory (kbytes, -v) unlimited
file locks (-x) unlimited2、调高虚拟内存,建议总内存至少大于10G
jtop
先加10G的,总计12G的内存

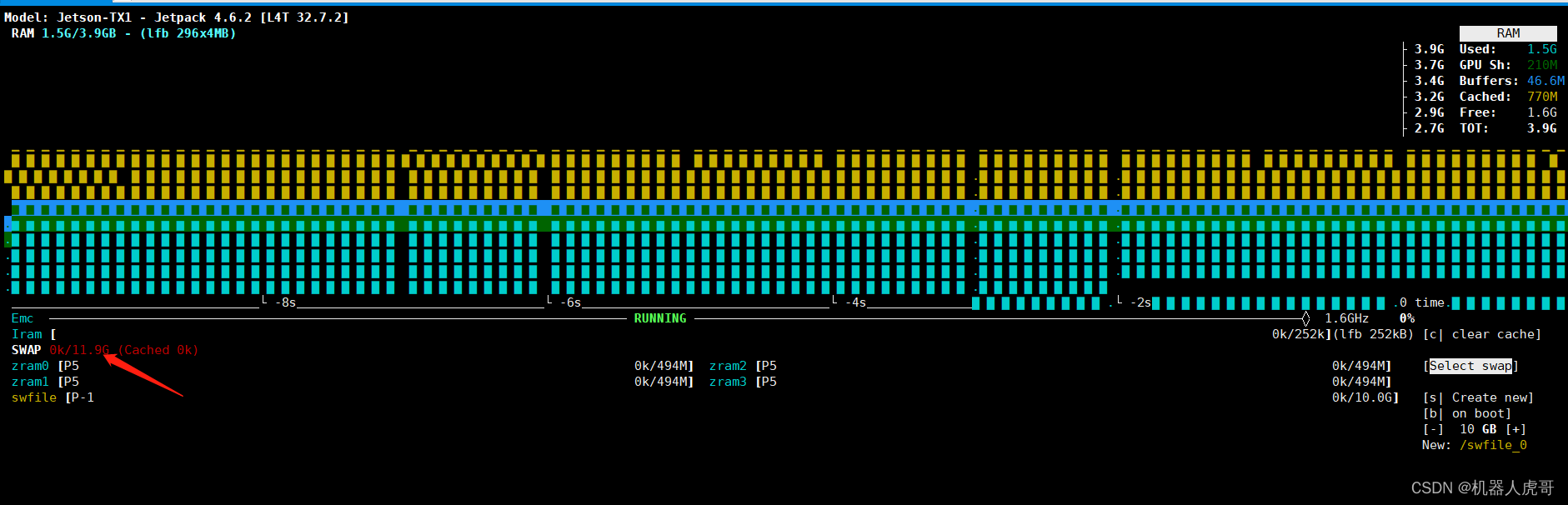
此处注意,如果之前已经操作过,记得到根目录把之前的swapfile 删除掉,再重来一遍。不要重启,重启后就没有了
3、源码编译安装
#前提环境
sudo apt-get install libjpeg-dev zlib1g-dev libpython3-dev libavcodec-dev libavformat-dev libswscale-dev
#这个官方教程没写
pip3 install setuptools
#sudo -H pip3 install -U pillow
#这步使用国内源也是可以过去的,就是费点时间,需要耐心
#sudo -H pip3 install pillow --user -i http://pypi.douban.com/simple/ --trusted-host pypi.douban.com
#执行这个
sudo pip3 uninstall pillow
sudo pip3 install 'pillow<7'
#如果上面一直安装不成功,超时,可以直接再WIN端迅雷下载,然后导入控制器进行手动安装
#下载链接
https://files.pythonhosted.org/packages/b3/d0/a20d8440b71adfbf133452d4f6e0fe80de2df7c2578c9b498fb812083383/Pillow-6.2.2.tar.gz
sudo pip3 install Pillow-6.2.2.tar.gz
#或者用8的版本,但是官方推荐用7以下的,所以这个可以预留尝试
#下载链接,可以迅雷下载挺快的,然后然后导入控制器进行手动安装
http://pypi.doubanio.com/packages/7d/2a/2fc11b54e2742db06297f7fa7f420a0e3069fdcf0e4b57dfec33f0b08622/Pillow-8.4.0.tar.gz#sha256=b8e2f83c56e141920c39464b852de3719dfbfb6e3c99a2d8da0edf4fb33176ed
#官网----克隆源代码----国内可能不好用
git clone --branch v0.10.0 https://github.com/pytorch/vision torchvision
cd torchvision/
git checkout -b v0.10.0
#查看当前分支
git branch -a
#国内用gitee
git clone --branch v0.10.0 https://gitee.com/zldtb/vision.git torchvision
cd torchvision/
git checkout -b v0.10.0
#查看当前分支
git branch -a setuptools安装过程截图


pillow 安装过程图


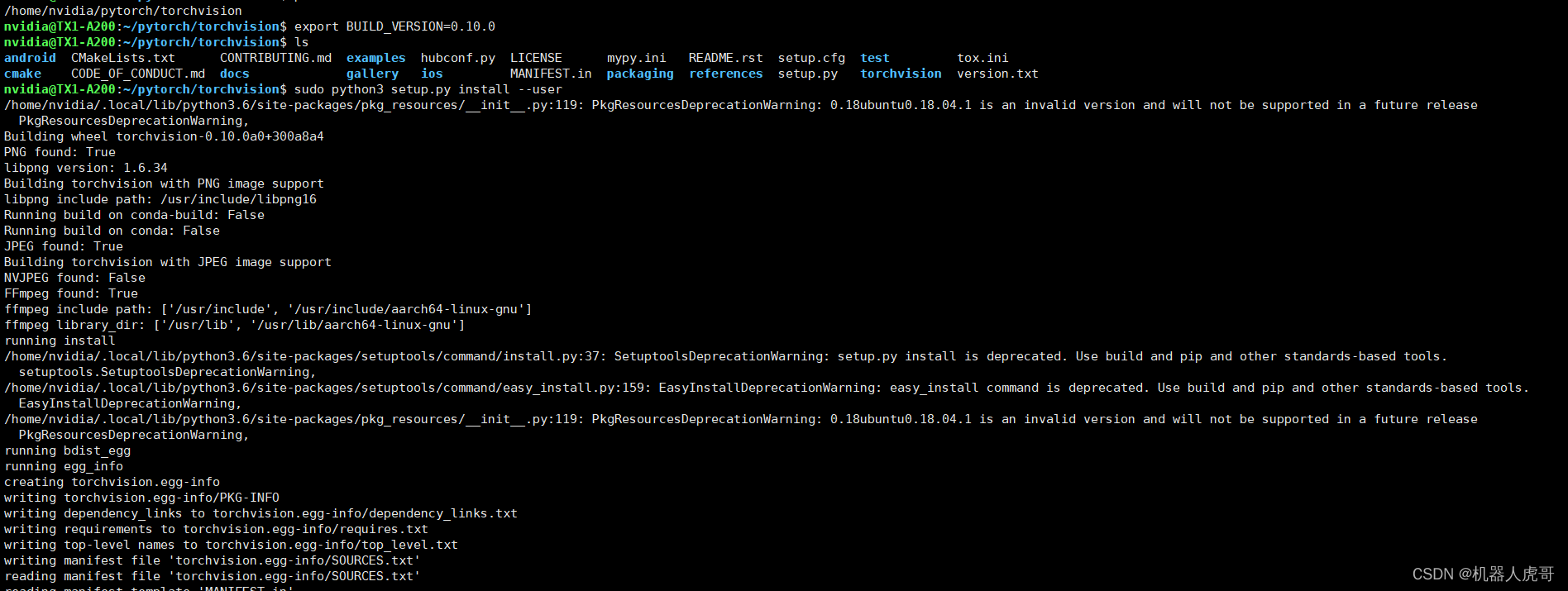
torchvision 安装过程截图

#进入克隆后的目录
cd /home/nvidia/pytorch/torchvision
#设置环境变量后,编译安装,之前记得增加虚拟内存,总内存需要至少大于10G才保险
export BUILD_VERSION=0.10.0
sudo python3 setup.py install --user安装过程截图:

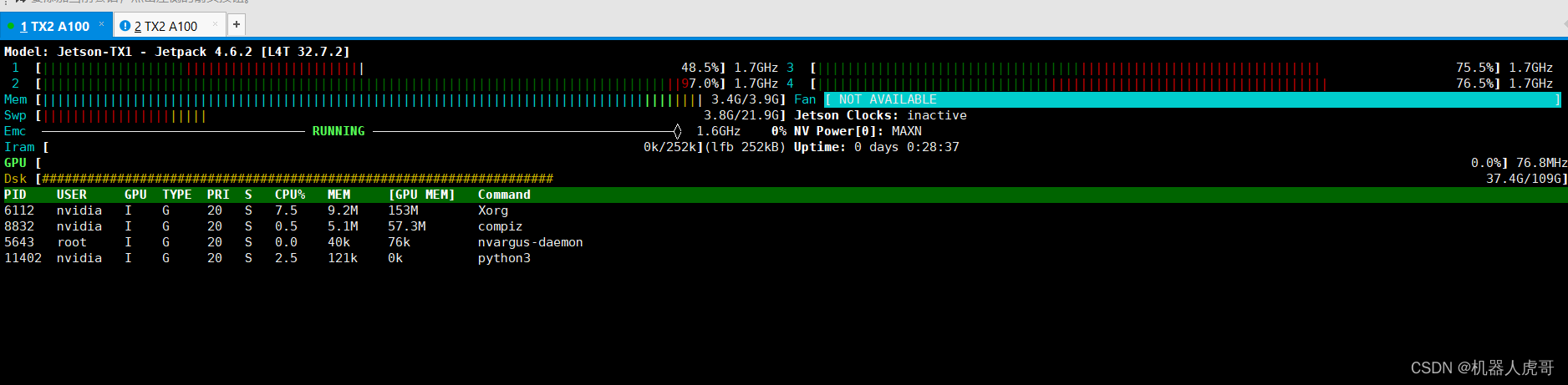
这就是调大虚拟内存的原因,不然控制器就死机了。
验证通过
nvidia@TX1-A200:~/pytorch/torchvision$ python3 Python 3.6.9 (default, Mar 10 2023, 16:46:00) [GCC 8.4.0] on linux Type "help", "copyright", "credits" or "license" for more information. >>> import torchvision /home/nvidia/pytorch/torchvision/torchvision/__init__.py:26: UserWarning: You are importing torchvision within its own root folder (/home/nvidia/pytorch/torchvision). This is not expected to work and may give errors. Please exit the torchvision project source and relaunch your python interpreter.warnings.warn(message.format(os.getcwd())) >>> print(torchvision.__version__) 0.10.0a0+300a8a4 >>>
那个报警应该是权限的问题,如果有影响,处理一下权限就可以
3.3 验证安装
To verify that PyTorch has been installed correctly on your system, launch an interactive Python interpreter from terminal (python command for Python 2.7 or python3 for Python 3.6) and run the following commands:
python3
>>> import torch
>>> print(torch.__version__)
>>> print('CUDA available: ' + str(torch.cuda.is_available()))
>>> print('cuDNN version: ' + str(torch.backends.cudnn.version()))
>>> a = torch.cuda.FloatTensor(2).zero_()
>>> print('Tensor a = ' + str(a))
>>> b = torch.randn(2).cuda()
>>> print('Tensor b = ' + str(b))
>>> c = a + b
>>> print('Tensor c = ' + str(c))
nvidia@nvidia-desktop:~/Workspace/Pytorch$ python3
Python 3.6.9 (default, Nov 25 2022, 14:10:45)
[GCC 8.4.0] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> import torch
>>> print(torch.__version__)
1.7.0
>>> print('CUDA available: ' + str(torch.cuda.is_available()))
CUDA available: True
>>> print('cuDNN version: ' + str(torch.backends.cudnn.version()))
cuDNN version: 8201
>>> a = torch.cuda.FloatTensor(2).zero_()
>>> print('Tensor a = ' + str(a))
Tensor a = tensor([0., 0.], device='cuda:0')
>>> b = torch.randn(2).cuda()
>>> print('Tensor b = ' + str(b))
Tensor b = tensor([-0.3136, -0.3914], device='cuda:0')
>>> c = a + b
>>> print('Tensor c = ' + str(c))
Tensor c = tensor([-0.3136, -0.3914], device='cuda:0')
验证版本
python3 >>> import torchvision >>> print(torchvision.__version__)
四、总结
整体我自己安装的时候,中间还是遇到很大麻烦事,但是好在都找到了对应的解决方案,分享一个小技巧:
我在文档中留了很多链接,可以直接用迅雷下载后转到控制器内再安装,可以省不少事。
纠错,疑问,交流: 911946883@qq.com