无人驾驶中定位的作用:
定位+高精度地图:提供当前位置的静态环境感知 (车道线/交通指示牌/红绿灯/柱子/建筑物/等)定位+动态物体感知:将感知到的动态物体正确放入静态环境定位获取位置姿态:用于路径规划/决策
场景:室内(房间/车库/仓库等) / 室外
按照感知模式
outside-in: 接收的外界信号包含位置相关信息 / GNSS UWB WIFI Lidar-Hdmap Camera-marker(室外街景门牌室内maker) 磁条加marker(规划都做了) 扫地机本身贴marker加顶部相机 / (适合测量方程)inside-out: 通过自身观察和感受获取位置信息 / IMU magnetometer SLAM VR中的墙面贴marker建图 / (适合状态方程)
按照计算方法
基于信号的定位: GNSS UWB WIFI / 几何关系环境特征匹配: Lidar-HDmap Camera-marker Radar / 需要建图,观测特征与数据库的特征匹配得到当前位姿态航迹推算: IMU odometry(轮子里程计/视觉里程计SLAM) / 根据之前的位姿推断当前的位姿
定位系统的融合
原理: 不同源传感器信息通过滤波器(KF EKF UKF PF等)进行融合
典型融合方式:
IMU+GNSS:高频率累计误差+低频率高精度 无人机/无人车/导弹/室外GNSS + Lidar-HDmap/Camera-marker:适合开放环境+适合密集特征环境 无人车/室内外VIO(SLAM+IMU+GNSS) 无人机/无人车/室内外IMU+magnetometer 矫正角度(例如:互补滤波/MadgwickAHRS) 无人机/无人车/室内外
GNSS(GPS+BDS+GLONASS+GALILEO)
基于信号的定位: 车载/手机GPS接收机接收卫星发射的无线电信号
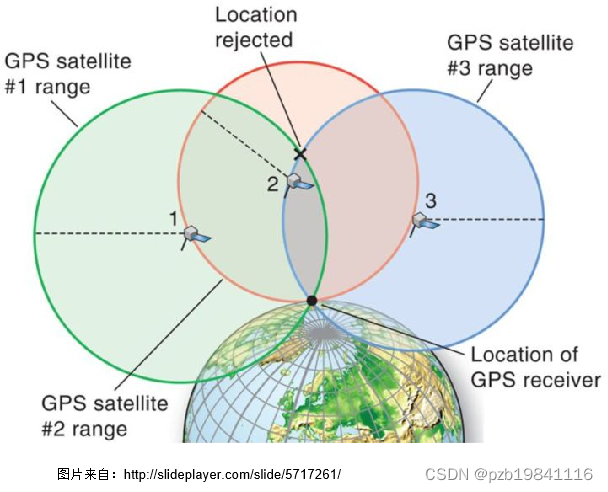
问题1:无线电信号受到大气干扰无法准确计算GPS接收机到卫星的距离
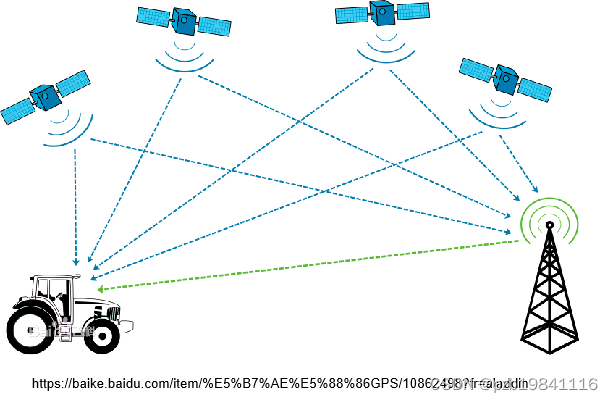
解决:差分GPS的技术(RTK)。 在地面上建基站(Base Station)它有精确位置信息。
问题2:遮挡/反射问题
遮挡:GPS接收机在高楼周围,容易失去某一方向所有卫星信号,仅有特定方向的卫星信号使得定位精度降低反射:有些信号被大楼楼体反射之后才被接收到,称作多路径信号(Multi-Path Signal),多路径信号计算得到的距离会明显大于实际距离(因为时间偏大)。解决: 仅靠GPS一种传感器很难在复杂场景中实现精确定位,必须引入其它互补传感器进行融合定位

问题3:定位频率低 GPS定位的频率一般只有10Hz(100ms定位一次)
解决:引入其它传感器(例如IMU)提高定位频率。进而提高控制频率。
GNSS小结:
优点: 全球/全天候/全时段/高精度
缺点: RTK差分技术的基站布设成本高,依赖可视卫星数量,易受电磁环境干扰,定位频率不够高,遮挡/反射(多径效应)
IMU
主要由陀螺仪和加速度计组成。消费级IMU(精度/价格低) ->光纤IMU(精度价格高)
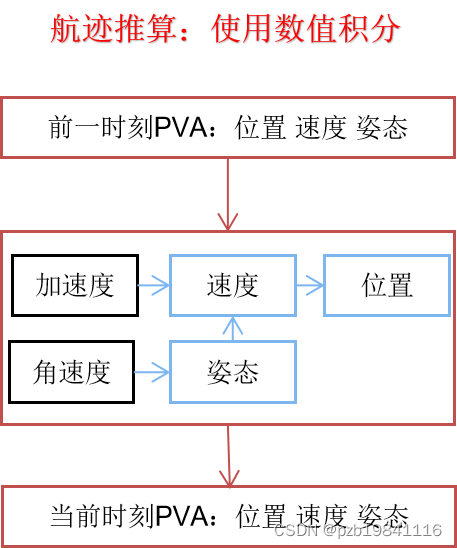
加速度计能够测量出载体相对于惯性空间所受的力(进而得到加速度)
陀螺仪能够测量出载体沿陀螺仪轴向的旋转角速度
IMU是惯性导航系统的基础,直接决定了惯性导航系统所能够达到的精度

IMU的特点
优点:输出频率高,短时精度高,六自由度,可工作于任何复杂环境缺点: 误差随时间累积
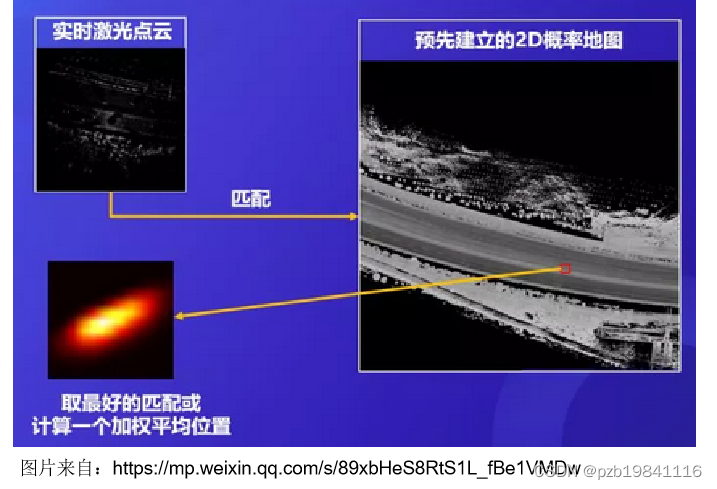
Lidar-HDmap
预先制作定位地图3D/2D,车上的实时点云和地图进行匹配计算激光雷达的位置和姿态
基于3D点云匹配, Scan Matching完成点云配准,常用的方法有两个:
ICP:最常见的是迭代最近点法(Iterative Closest Point ,ICP),该方法基于当前扫描和目标扫描的距离度量来完成点云配准NDT:正态分布变换(Normal Distributions Transform,NDT)也是进行点云配准的常用方法,它基于点云特征直方图来实现配准
激光定位特点:
优点: 鲁棒性比较好/ 无GPS可工作 / 能实现10厘米以内的定位精度缺点: 需要预先制作地图并定期更新地图(环境会发生变化),雨雪天气情况下Lidar被折射导致收到的点云数据变少,开放路段点云少仍需要GNSS(对于场景单一路段例如高速公路 GNSS+Lidar-HDmap成本过高)
Camera-marker
街景定位(Sacha Arnoud, Director of Engineering, Waymo):Waymo利用谷歌强大的街景数据标注出路牌号码,商店标志,红路灯等静态数据,来确定自身车辆所在的位置
原理: 预先标注出路牌号码,商店牌匾,红绿灯等静态marker的全球坐标系。车载相机检测出maker之后通过透视原理或者相对距离推算出车辆自身的全球坐标优点: 简单直接:街景地图标记好之后,车辆本身只需要摄像机就可以实现精准的定位和导航缺点: 巨大的数据量和人工标注,摄像机采图问题:强光/弱光/逆光都会影响检查效果,基于图像计算深度图存在误差(越远视察越小 误差越大 z=fb/d),开放场景下(如高速公路) maker少甚至没有marker
SLAM:Simultaneous Localization and Mapping 同时定位与建图定位 :
室内、室外 (我在哪?)
建图:稀疏、半稠密、稠密 (环境如何?)
准确的定位需要精确的地图,精确的地图来自准确的定位
机器人定位(例如扫地机)/手持设备定位(例如AR)/自动驾驶定位
类型:激光SLAM / 视觉SLAM(Monocular/Stereo/RGB-D) / VIO(IMU+SLAM)
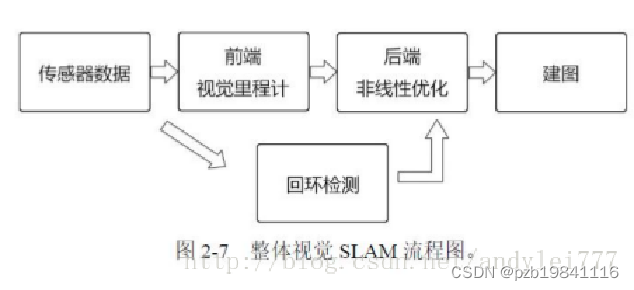
视觉SLAM框架
前端: Visual Odometry 视觉里程计用于估计邻近时刻的相机运动(类似IMU航迹推算)后端:Optimization(滤波器法/图优化法)使用局部约束关系估计最优轨迹与地图回环检测:Loop Closing 检测是否形成了一个回环进而矫正整圈轨迹建图:Mapping 度量地图、拓扑地图、稀疏地图、稠密地图

定位融合技术
原理:不同源传感器信息通过滤波器(KF EKF UKF PF等)进行融合 优势互补
典型融合方式:
IMU+GNSS:高频率累计误差+低频率高精度 无人机/无人车/导弹/室外GNSS + Lidar-HDmap/Camera-marker:适合开放环境+适合密集特征环境 无人车/室内外VIO(SLAM+IMU+GNSS) 无人机/无人车/室内外IMU+magnetometer 矫正角度(例如:互补滤波/MadgwickAHRS) 无人机/无人车/室内外

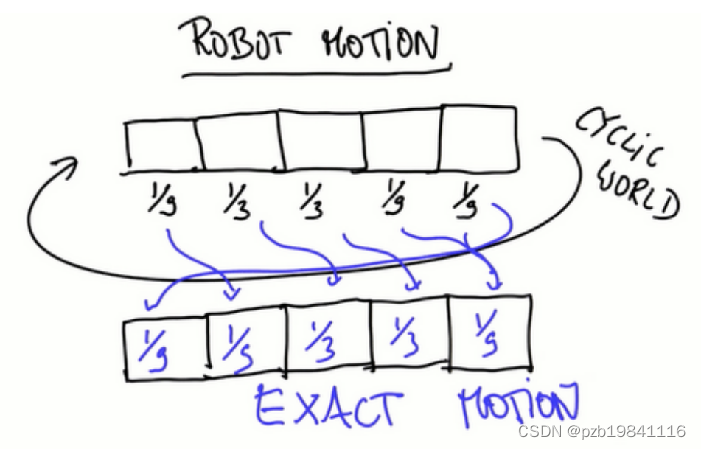
直方图滤波
本质就是先假设在各点的概率相同,在通过移动和观察逐步更新概率分布,最后用作定位。直方图滤波在无人驾驶中用到的比较多。
Apollo定位方案
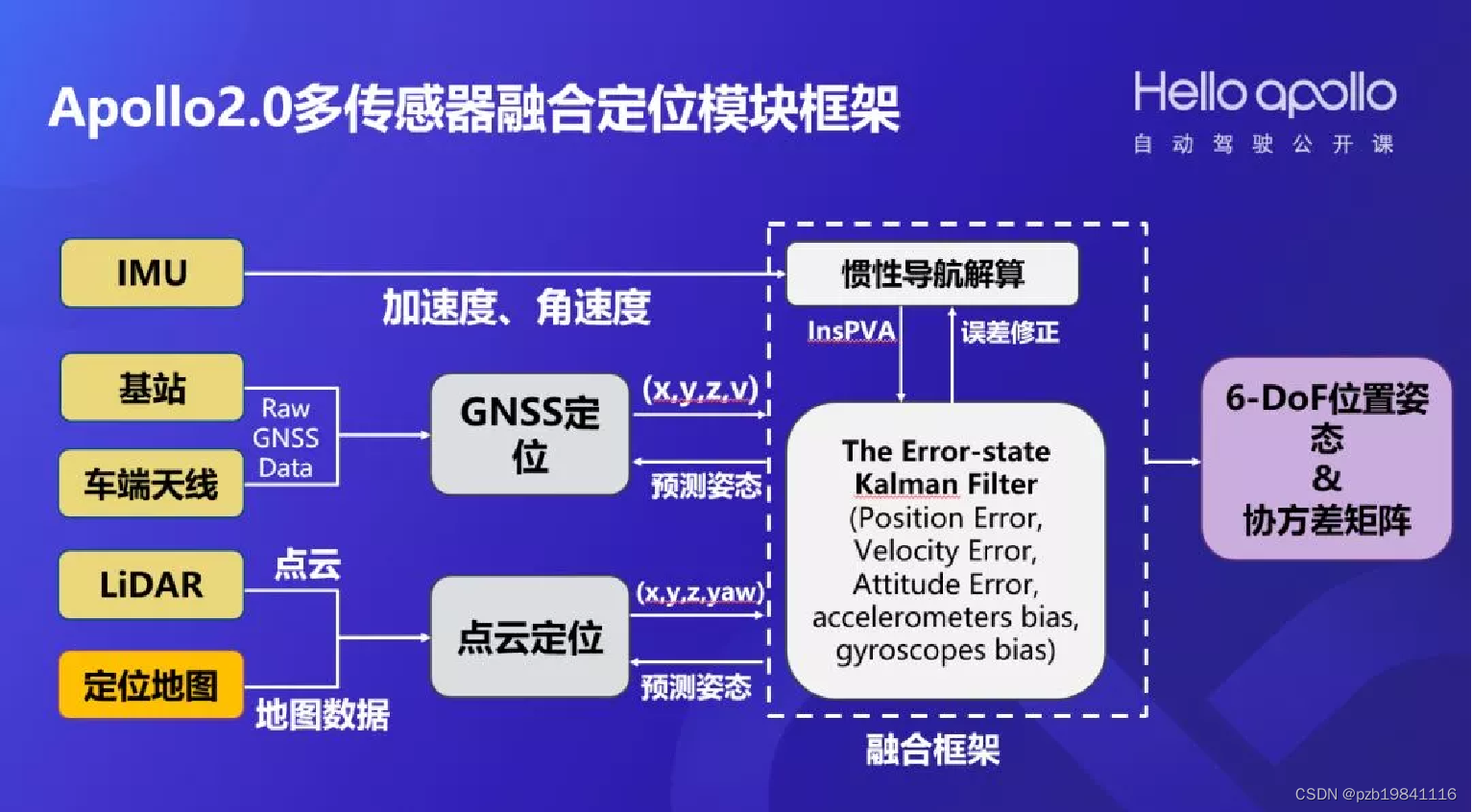
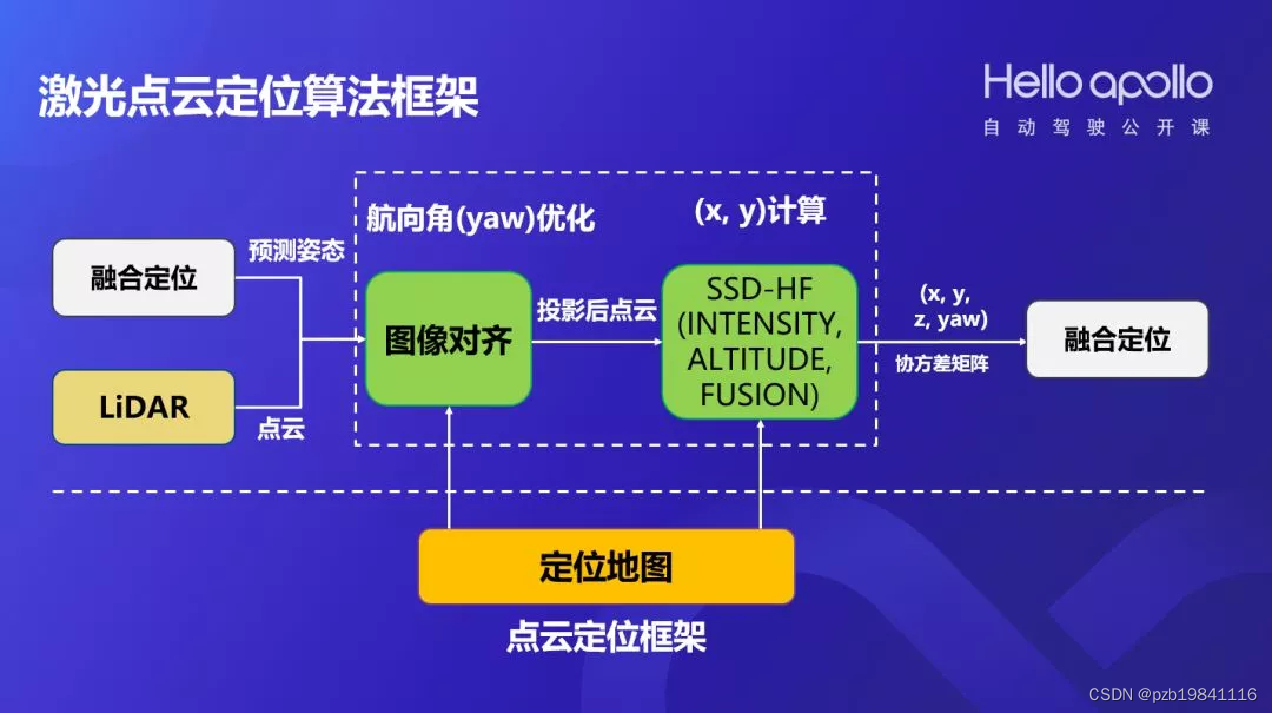
二维直方图滤波器:-
中心放在预测姿态(x0, y0),滤波器一般选择21*21=441个位置进行搜索 - predict(move): - update(sense): SSD衡量观测与地图点的匹配程度