- https://rufus.ie/zh/ 下载该软件,准备制作启动盘
- 下载自己想要的镜像,http://mirrors.163.com/ubuntu-releases/18.04/, 我选择的是ubuntu-18.04.6-live-server-amd64.iso 因为,科研写程序使用,不需要桌面版本。
- 开始制作启动U盘。
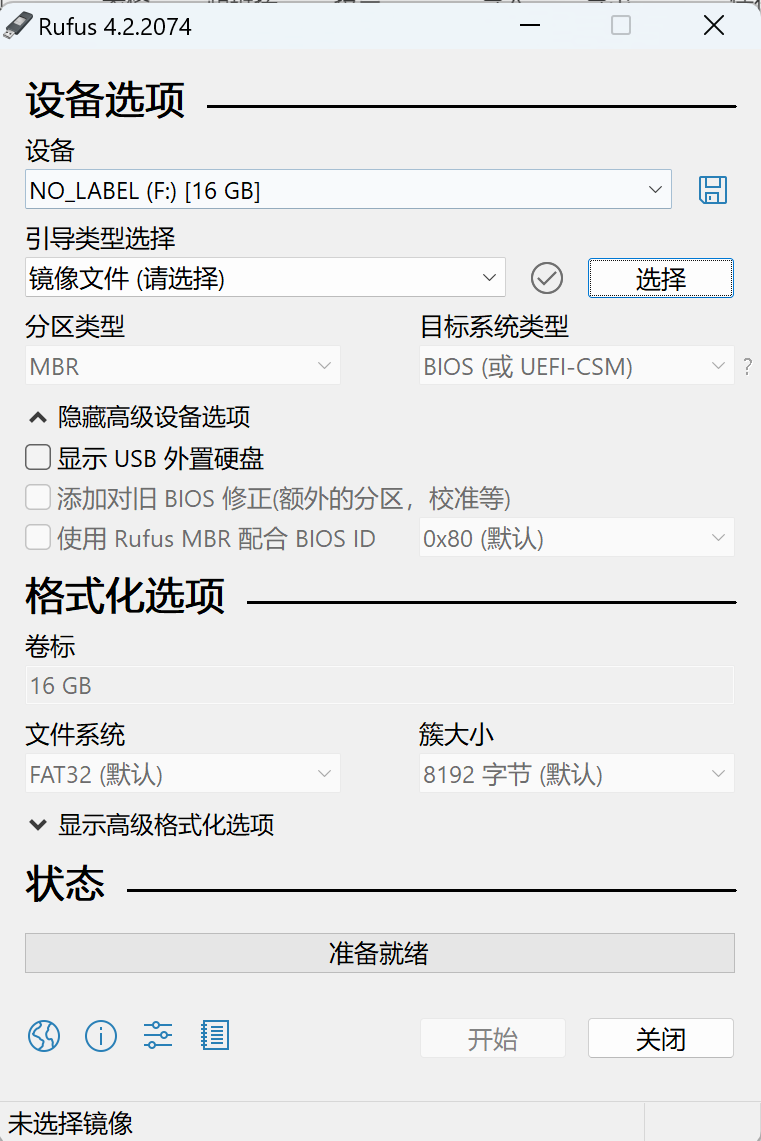
step 1: 清空自己的U盘中的内容,点击选择按钮,选择一个自己已经下载好的 iso文件。
step 2: 选择持久分区的大小,也就是这个U盘中多大的容量还可以用于存储文件和数据。由于我的U盘比较大,所以我选择了8G。剩下8G给系统镜像,绰绰有余。(纠正,下面文件系统选项要选择 NTFS。不要FAT32)
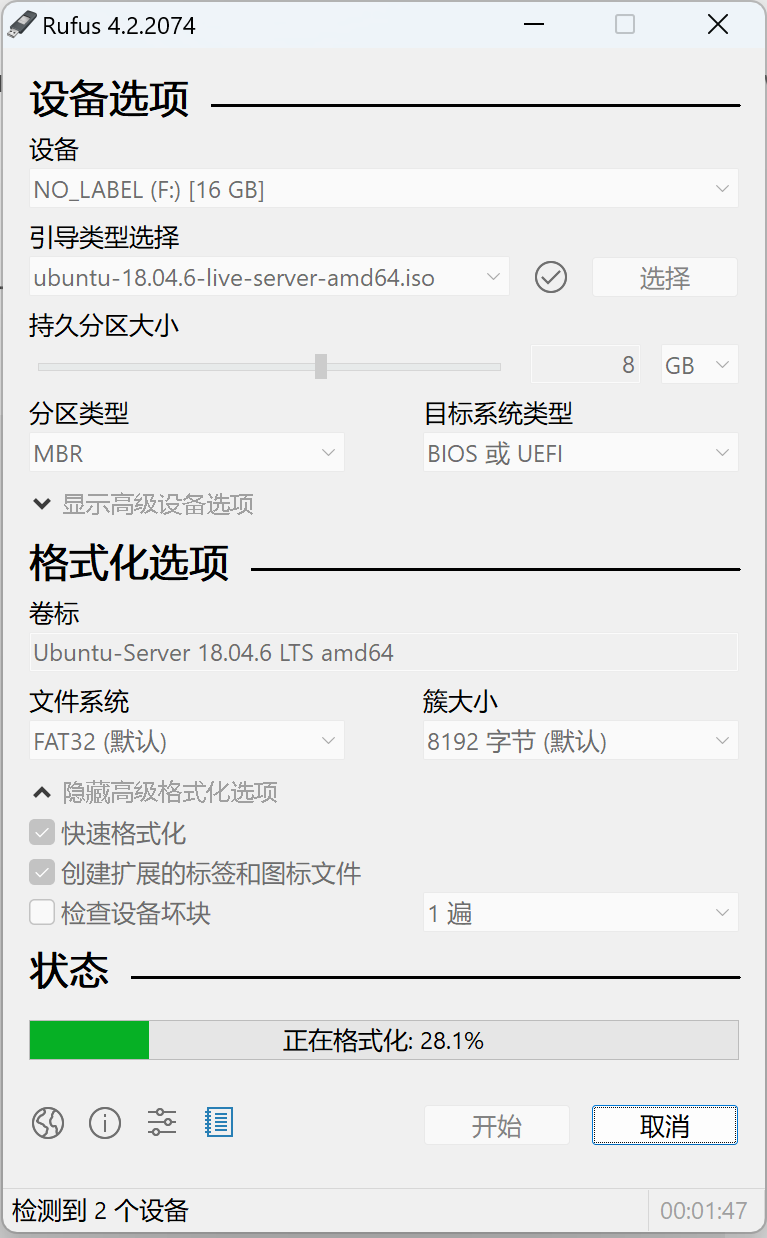
step 3,点击开始,安装镜像。