一、纵向规划
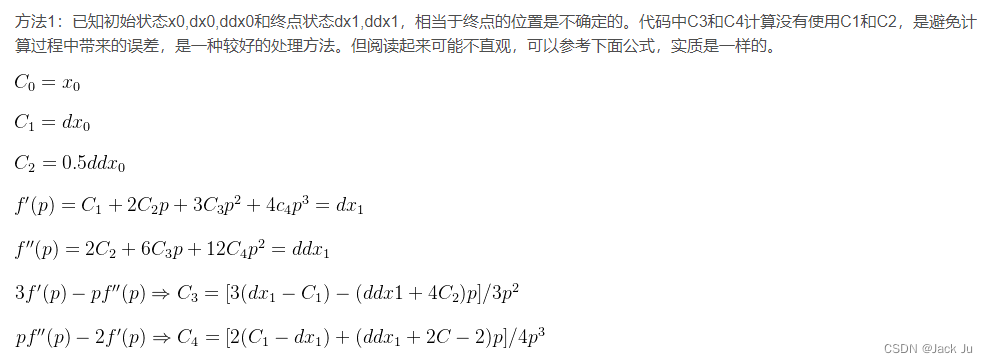
void QuarticPolynomialCurve1d::ComputeCoefficients(const float x0, const float dx0, const float ddx0, const float dx1,const float ddx1, const float p) {if (p <= 0.0) {std::cout << "p should be greater than 0 at line 140." << std::endl;}coef_[0] = x0;coef_[1] = dx0;coef_[2] = 0.5 * ddx0;float b0 = dx1 - ddx0 * p - dx0;float b1 = ddx1 - ddx0;float p2 = p * p;float p3 = p2 * p;coef_[3] = (3 * b0 - b1 * p) / (3 * p2);coef_[4] = (-2 * b0 + b1 * p) / (4 * p3);
}