PART 1
实验名称及目的
QGC实时调整控制器参数实验:在进行硬件在环仿真和真机实验时,常常需要在QGC地面站中观察飞行状态,并对控制器参数进行实时调整,以使得飞机达到最佳的控制效果,但是,在Simulink中设计出得控制模型参数并不能在QGC中对控制器参数进行调整,因此,本实验基于RflySim平台得接口演示如何将控制器中的参数导入到QGC中,并进行调整。
PART 2
实验效果
通过在Simulink模型文件中新建参数并上传固件,在QGC中查看并修改参数。
PART 3
运行环境
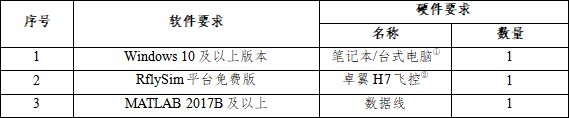
①:推荐配置请见:https://doc.rflysim.com/1.1InstallMethod.html
②:须保证平台安装时的编译命令为:droneyee_zyfc-h7_default,固件版本为:1.12.1。其他配套飞控请见:http://doc.rflysim.com/hardware.html 。
PART 4
实验步骤
Step 1:
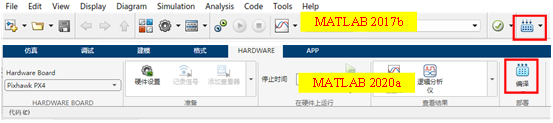
打开MATLAB软件,运行Init_control.m文件,同时将打开PX4QGCTune.slx文件,在Simulink中,点击编译命令。
Step 2:
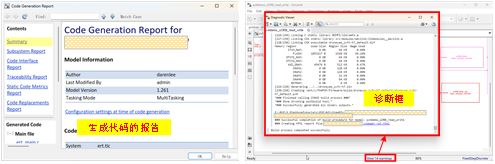
在Simulink的下方点击View diagnostics指令,即可弹出诊断对话框,可查看编译过程。在诊断框中弹出Build process completed successfully,即可表示编译成功,左图为生成的编译报告。
Step 3:
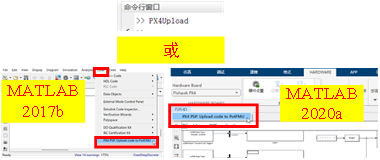
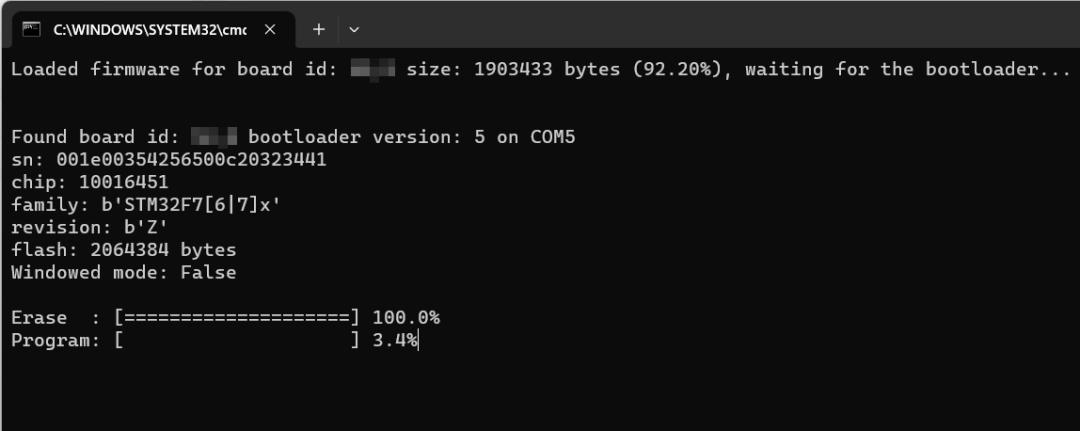
用USB数据线链接飞控与电脑。在MATLAB命令行窗口输入:PX4Upload并运行或点击PX4 PSP:Upload code to Px4FMU,弹出CMD对话框,显示正在上传固件至飞控中,等待上传成功。
Step 4:
打开QGroundControl软件。确认无人机机架及遥控器通道设置如下:

Step 5:
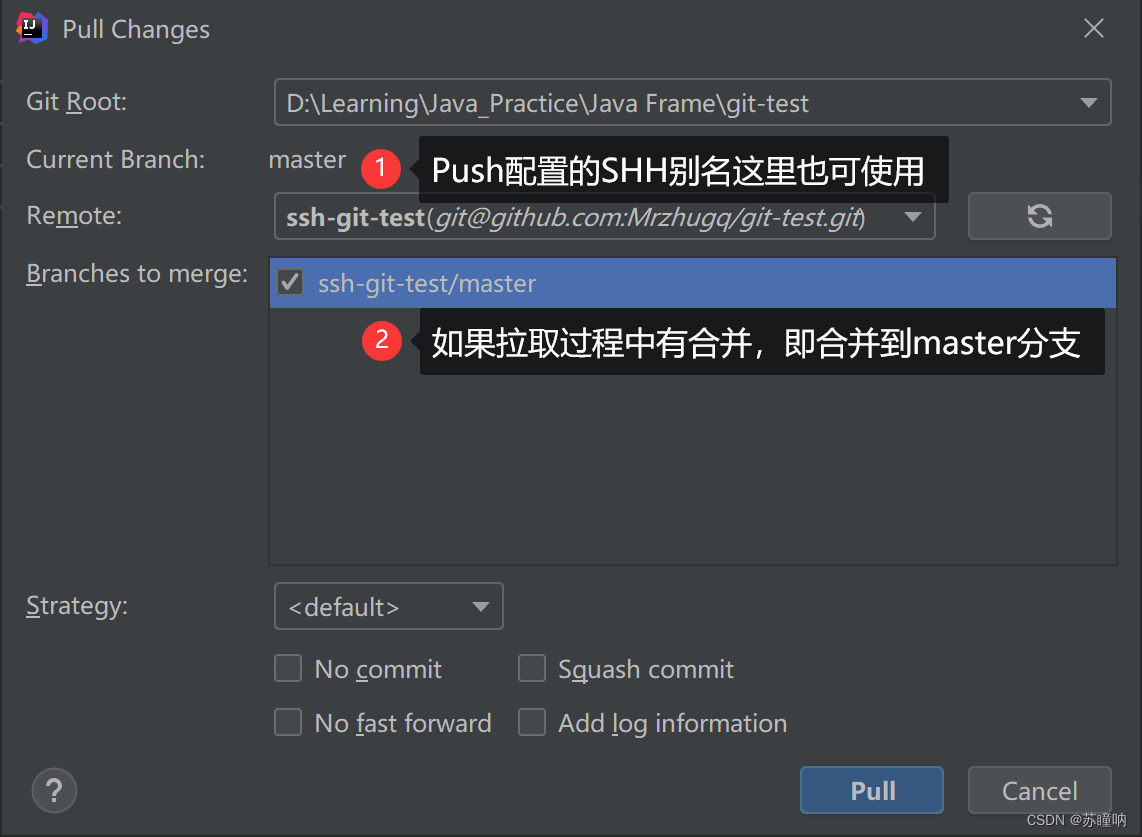
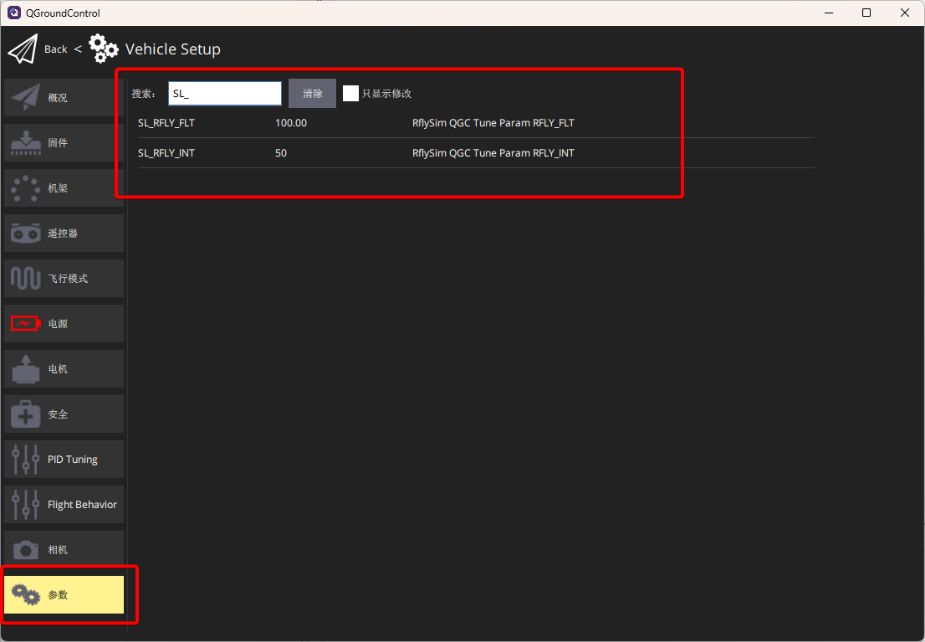
上传成功后,双击打开QGroundControl软件,等待连接成功后,在QGC的Logo处点击在弹出对话框中选择Vehicle_Steup。在界面中选择参数,上方搜索框中输入:SL_,即可弹出MATLAB中定义的两个参数:SL_RFLY_FLT、SL_RFLY_INT。如下图所示。
Step 6:
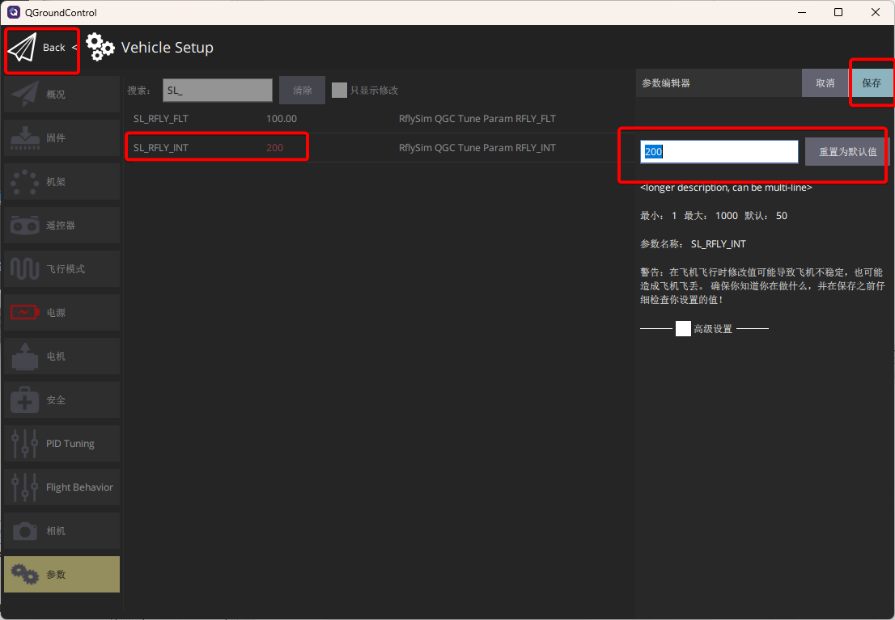
上图中的任意参数进行修改,如修改SL_RFLY_INT为200,在点击保存,点击左上角Back,回到QGC初始界面,在QGC的Logo处点击在弹出对话框中选择Analyze Tools。
在弹出的界面中选择MAVLink检测->ACTUATPR_CONTROL_TARGET,即可看到修改之后的值,如下图所示。