Autoware.ai1.14.0自动驾驶-Demo运行
数据准备
下载数据:
wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_data.tar.gz
wget https://autoware-ai.s3.us-east-2.amazonaws.com/sample_moriyama_150324.tar.gz
一定要注意解压文件是在.autoware/路径下的,不然后续运行launch文件时,会提示找不到文件:.autoware/data/tf/tf.launch:
修改run脚本,改为正确source路径
cd ~/autoware-1.14/install/runtime_manager/share/runtime_manager/scripts
gedit run
修改如下内容:
${OPTION_COMMAND}="bash -c 'source ~/autoware-1.14/install/setup.bash;
为了防止警告,找到‘state_publisher’并用‘robot_state_publisher’去代替它。
文件位置:autoware-1.14>install>vehicle_description>share>vehicle_description>launch>vehicle_model.launch
打开后修改其中的文件:把‘state_publisher’改为‘robot_state_publisher’
启动autoware
source install/setup.bash
roslaunch runtime_manager runtime_manager.launch
配置Demo
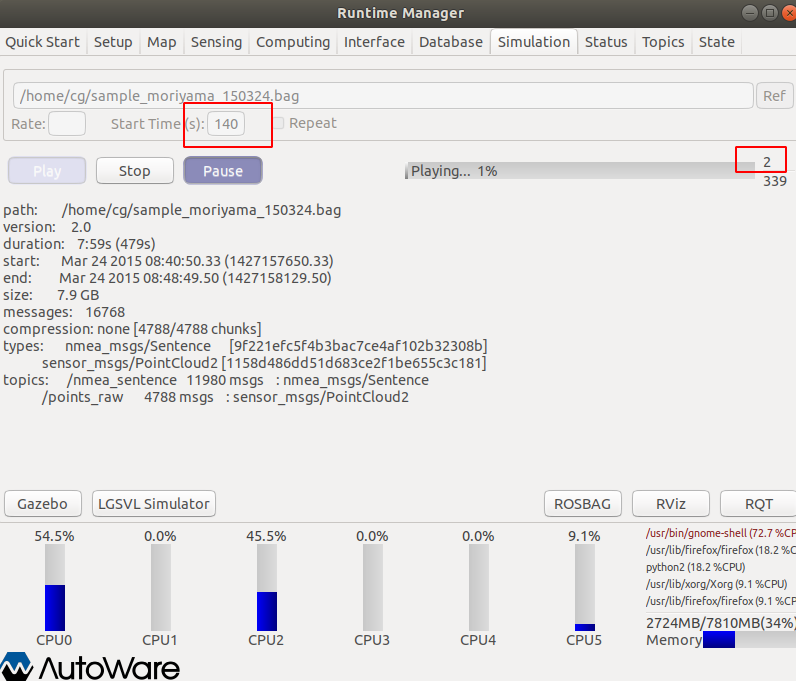
1在Runtime Manager中选中“Simulation”Tab,在底下的文件选择框中选取从“sample_moriyama_data.tar.gz”中解压出来的rosbag文件,设置start Time为140s,点击下面的“Play”按键即可开始播放Demo中所录制的自动驾驶过程,但这里我们需要在2s后点击“Pause”,如图所示,原因是我们还需要设置其他一些数据和参数。
2.在“Setup”Tab中设置TF和车辆模型,即点击“TF”按钮及“Vehicle Model”按钮即可。正确点击后了两个按钮应该是处于深色的状态。
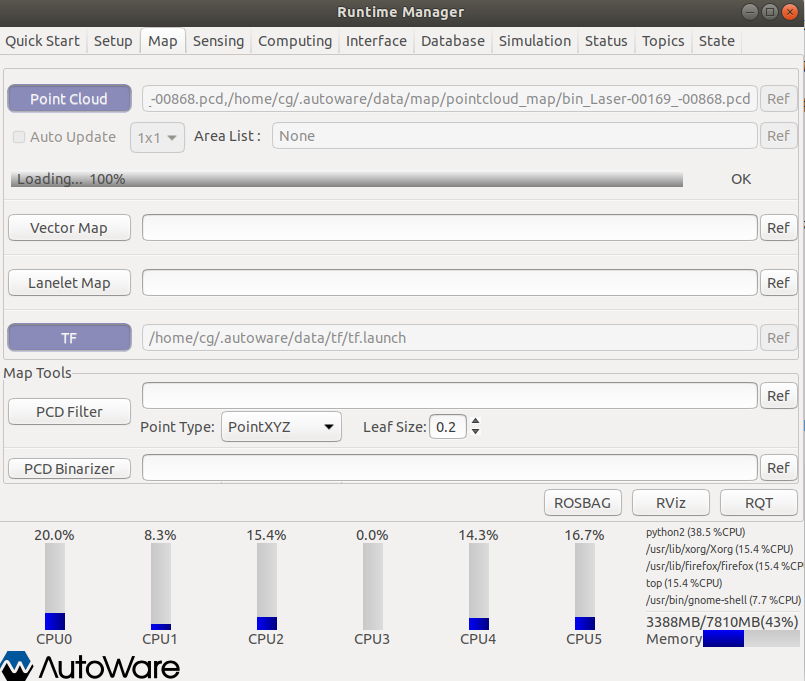
 3. 在“Map”Tab中选择地图文件和TF设置文件。在“Point Cloud”后面的文件选择框内载入点云地图文件,相关的文件存储在“sample_moriyama_data.tar.gz”文件所解压出来的文件中,具体位置为“data/map/pointcloud_map”,需要选中文件夹内所有的文件。然后点击“Point Cloud”按钮使之变为下图所示的深色状态。在“TF”按钮后面的文件选择框内载入tf.launch文件。我选用autoware-1.14/src/autoware/documentation/autoware_quickstart_examples/launch里面的,选中tf_local.launch文件。然后点击“TF”按钮使之变为下图所示的深色状态。
3. 在“Map”Tab中选择地图文件和TF设置文件。在“Point Cloud”后面的文件选择框内载入点云地图文件,相关的文件存储在“sample_moriyama_data.tar.gz”文件所解压出来的文件中,具体位置为“data/map/pointcloud_map”,需要选中文件夹内所有的文件。然后点击“Point Cloud”按钮使之变为下图所示的深色状态。在“TF”按钮后面的文件选择框内载入tf.launch文件。我选用autoware-1.14/src/autoware/documentation/autoware_quickstart_examples/launch里面的,选中tf_local.launch文件。然后点击“TF”按钮使之变为下图所示的深色状态。
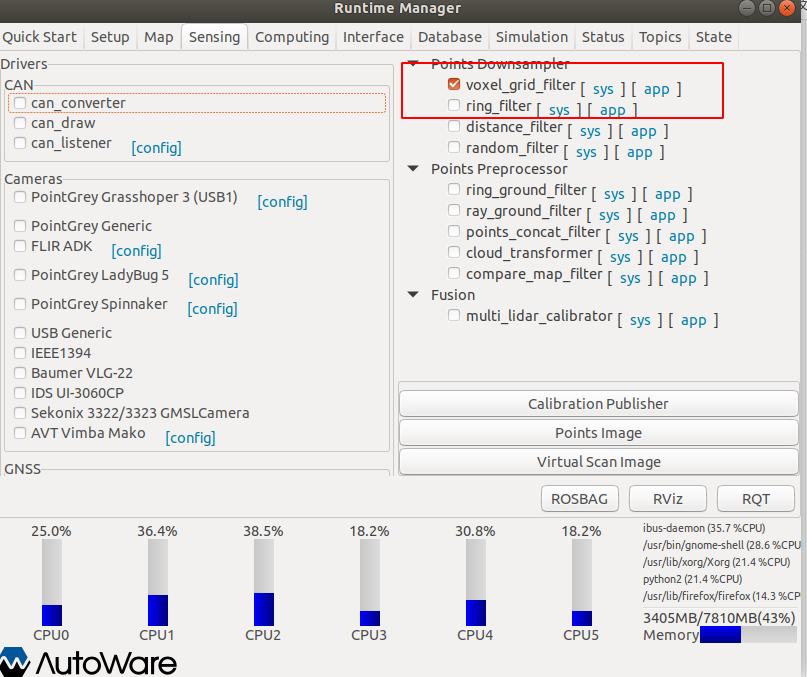
 4. 在“Sensing”Tab中勾选“voxel_grid_filter”,如下图所示。
4. 在“Sensing”Tab中勾选“voxel_grid_filter”,如下图所示。
5.在“Computing”Tab中勾选“nmea2tfpose”“ndt_matching”,如下图所示。
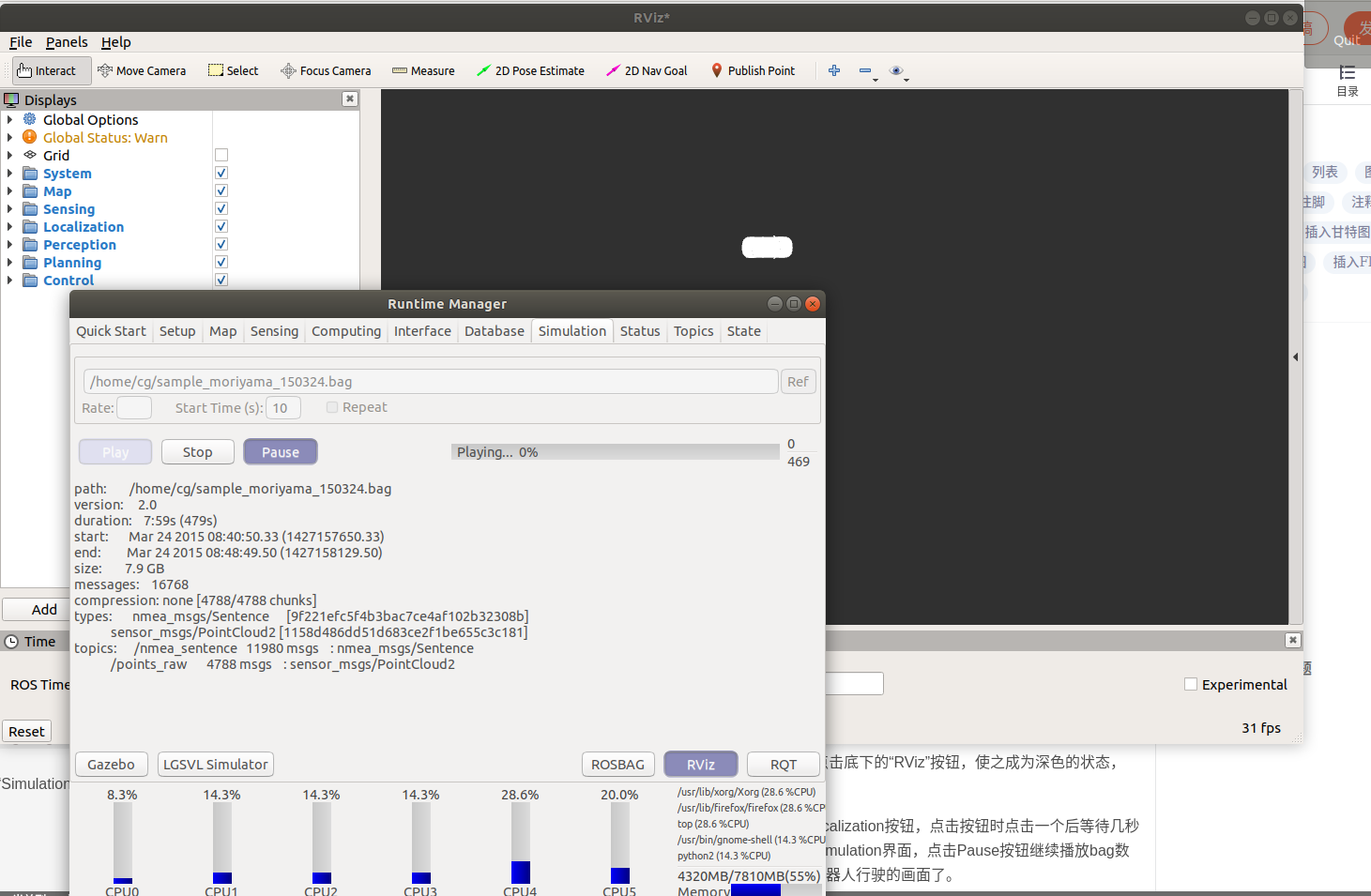
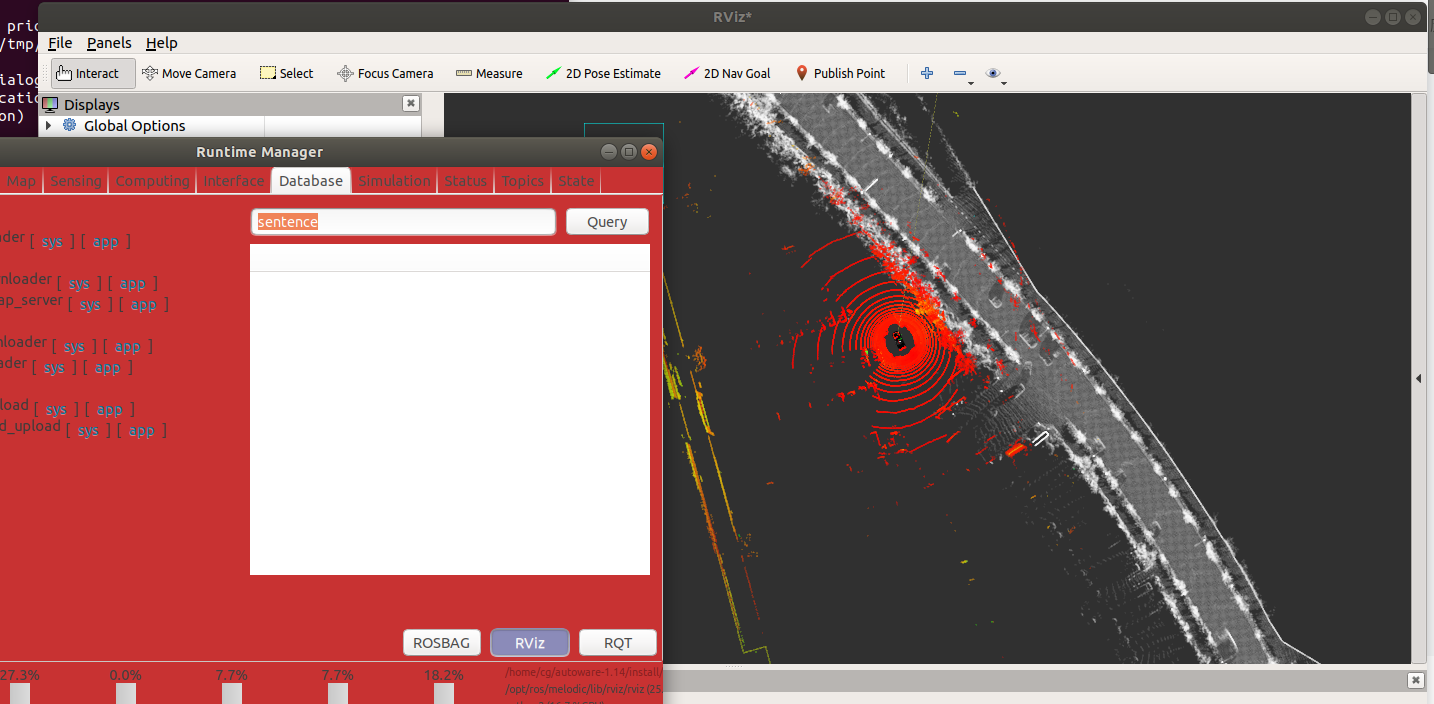
 6. 开启RViz可视化工具,回到“Simulation”Tab,点击底下的“RViz”按钮,使之成为深色的状态,如下图所示。
6. 开启RViz可视化工具,回到“Simulation”Tab,点击底下的“RViz”按钮,使之成为深色的状态,如下图所示。
 7. 设置RViz,首先选择RViz配置文件,在菜单中选择“File–>Open Config”,选择“autowar-1.14/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/”下的“default.rviz”文件。
7. 设置RViz,首先选择RViz配置文件,在菜单中选择“File–>Open Config”,选择“autowar-1.14/src/autoware/documentation/autoware_quickstart_examples/launch/rosbag_demo/”下的“default.rviz”文件。
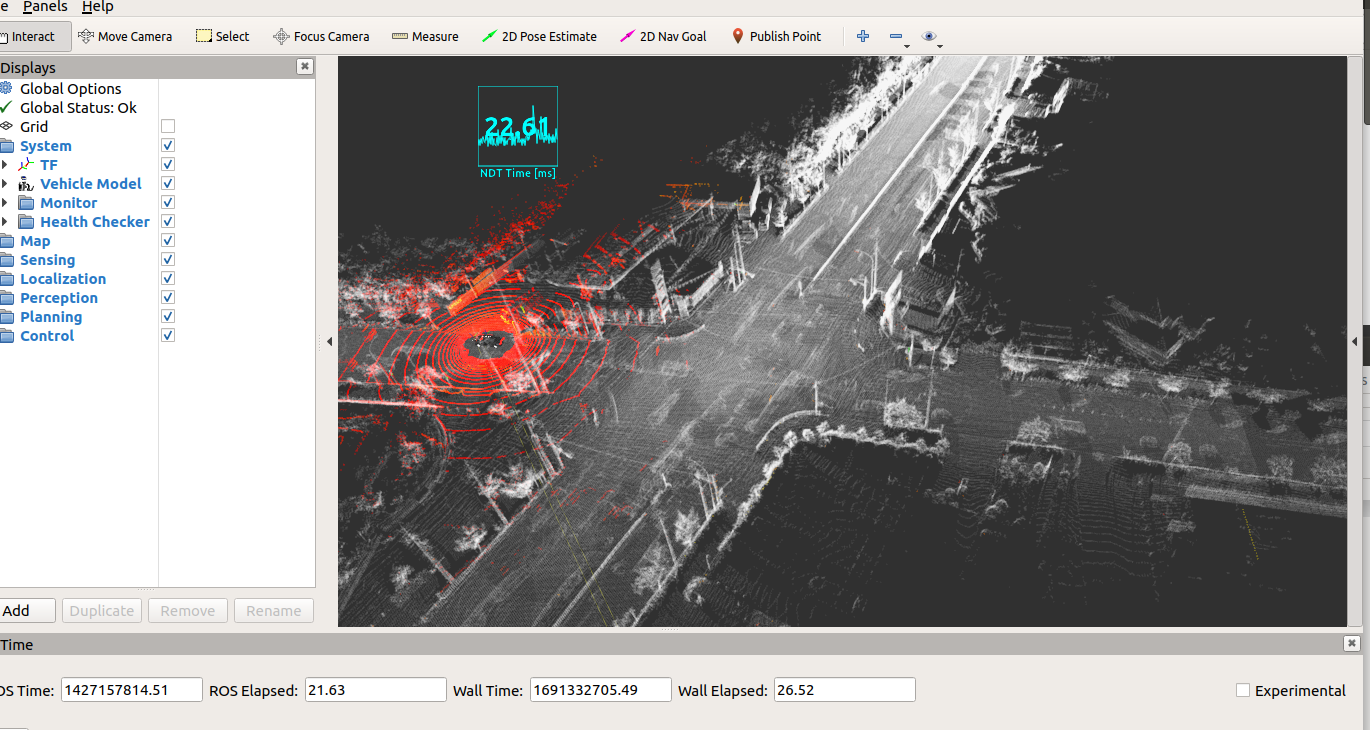
8.回到Runtime Manager,进入到“Simulation”Tab页,点击“Pause”按钮,这时Demo会结束暂停状态,继续播放rosbag文件。稍等片刻,就可以在Rviz中看到点云地图和机器人行驶的画面了。
bug:
车飘。
成功解决:
将sample_moriyama_data里面的tf.launch改为autoware自带的tf_local.launch。并把Start Time设置为140(其实多少没有多大关系),让数据先跑会,稳定一下。
更多介绍可以学习参考:
Autoware1.14入门教程