本部分主要为机器学习理论入门_K近邻法(KNN),书籍参考 “ 统计学习方法(第二版)”。
学习目标: 了解k近邻算法的基本概念、原理、应用;熟悉k近邻算法重要影响要素;熟悉kd树原理与优化应用。
开始本算法之前我们首先直观的感受一下本算法的具体场景。
首先回顾一下感知机算法:感知机是二类分类的线性分类模型,是对应于特征空间中将实例划分为正负两类的分离超平面。有对比就有差距了,超过两类的数据如何处理呢,那么就有了K近邻算法:kNN是一种基本的分类与回归方法,可以适用与多类分组,当然了KNN不仅局限于分类问题。

一、K近邻算法原理
1.1 基本概念
邻近算法,或者说K最近邻(kNN,k-NearestNeighbor)分类算法是数据挖掘分类技术中最简单的方法之一。所谓K最近邻,就是k个最近的邻居的意思,说的是每个样本都可以用它最接近的k个邻居来代表。Cover和Hart在1968年提出了最初的邻近算法。KNN是一种分类(classification)算法,它输入基于实例的学习(instance-based learning),属于懒惰学习(lazy learning)即KNN没有显式的学习过程,也就是说没有训练阶段,数据集事先已有了分类和特征值,待收到新样本后直接进行处理。
k近邻算法是一种基本分类和回归方法,通过测量不同特征值之间的距离进行分类。
K近邻算法,即是给定一个训练数据集,对新的输入实例,在训练数据集中找到与该实例最邻近的K个实例,这K个实例的多数属于某个类,就把该输入实例分类到这个类中。

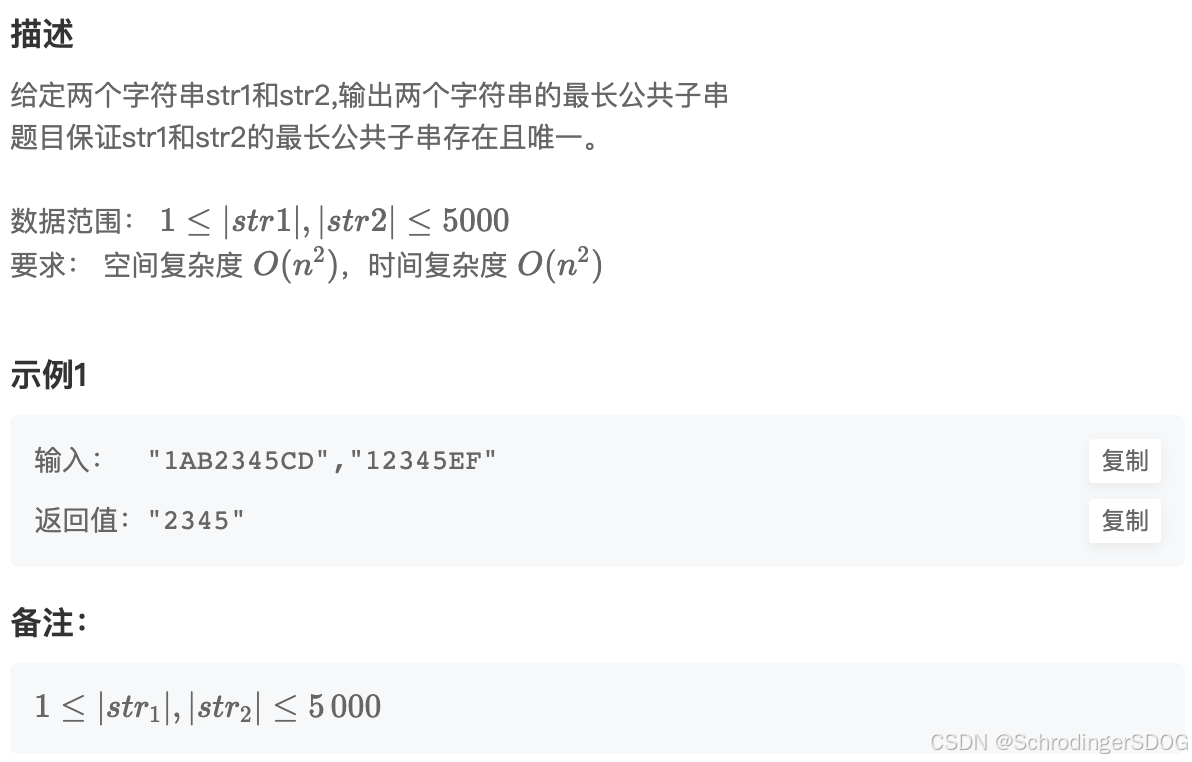
如上图所示,有两类不同的样本数据,分别用蓝色的小正方形和红色的小三角形表示,而图正中间的那个绿色的圆所标示的数据则是待分类的数据。这也就是我们的目的,来了一个新的数据点,我要得到它的类别是什么?好的,下面我们根据k近邻的思想来给绿色圆点进行分类。
- 如果K=3,绿色圆点的最邻近的3个点是2个红色小三角形和1个蓝色小正方形,少数从属于多数,基于统计的方法,判定绿色的这个待分类点属于红色的三角形一类。
- 如果K=5,绿色圆点的最邻近的5个邻居是2个红色三角形和3个蓝色的正方形,还是少数从属于多数,基于统计的方法,判定绿色的这个待分类点属于蓝色的正方形一类。
上边便是k近邻算法的核心思想了,简单实用。
下边来看一下书上的标准定义:

K近邻并没有显式的学习过程,也就是不需要对训练集进行学习。预测过程中直接遍历预测点与所有点的距离,并找到最近的K个点即可。找到K个最近点后,使用多数表决(即投票)的方式确定预测点的类别。式3.1I(yi=ci)中的I为指示函数,当括号内条件为真时I(true)=1,I(false)=0。argmax表示令后式数值最大时的参数,例如argmax(-X^2 + 1)的结果为0,因为x=0时-X^2 + 1结果为1,为最大值。
式3.1表示对于每一个类Cj,进行I(yi=cj)进行求和,就是计算这K个点中有多少个标记为Cj的点,例如K=25,一共有四个类分别为C1、C2、C3、C4,25个点中他们的个数分别有10、5、1、9个,那么最多数目的类别C1就是样本点的预测类别。
1.2 算法流程
根据上述算法思想给出起对应的实现步骤:
- 计算测试数据与各个训练数据之间的距离;
- 按照距离的递增关系进行排序;
- 选取距离最小的K个点;
- 确定前K个点所在类别的出现频率;
- 返回前K个点中出现频率最高的类别作为测试数据的预测分类
1.3 应用场景
-
推荐系统: 基于用户之前的喜好推荐相似电影;推荐用户可能喜欢的曲目或歌手
-
文本分类: 区分垃圾邮件和正常邮件。
-
图像识别: 识别包括上的手写邮政编码,分类投递邮件包裹
-
医疗诊断: 预测患者可能的疾病风险。
-
信用评分: 预测客户的信用风险。
-
欺诈检测: 识别信用卡中的异常交易。
-
位置基服务: 基于位置提供餐厅或服务推荐。
二、KNN算法重点要素
上述算法实现步骤是不是很简单?但是其中各参数如何选取也是调参中的重要技术活呀,所以就有了k近邻算法的三要素:距离度量,K值的选择。
2.1 距离度量
在上文中说到,k近邻算法是在训练数据集中找到与该实例最邻近的K个实例,这K个实例的多数属于某个类,我们就说预测点属于哪个类。
定义中所说的最邻近是如何度量呢?我们怎么知道谁跟测试点最邻近。这里就会引出我们几种度量俩个点之间距离的标准。
书中给出了以下几种度量方式:

其中当p=2的时候,就是我们最常见的欧式距离,我们也一般都用欧式距离来衡量我们高维空间中俩点的距离。在实际应用中,距离函数的选择应该根据数据的特性和分析的需要而定,一般选取p=2欧式距离表示。
2.2 K值选择
K:临近数,即在预测目标点时取几个临近的点来预测。
K值得选取非常重要,因为:
- 如果当K的取值过小时,一旦有噪声得成分存在们将会对预测产生比较大影响,例如取K值为1时,一旦最近的一个点是噪声,那么就会出现偏差,K值的减小就意味着整体模型变得复杂,容易发生过拟合;
- 如果K的值取的过大时,就相当于用较大邻域中的训练实例进行预测,学习的近似误差会增大。这时与输入目标点较远实例也会对预测起作用,使预测发生错误。K值的增大就意味着整体的模型变得简单;
- 如果K==N的时候,那么就是取全部的实例,即为取实例中某分类下最多的点,就对预测没有什么实际的意义了;
K的取值尽量要取奇数,以保证在计算结果最后会产生一个较多的类别,如果取偶数可能会产生相等的情况,不利于预测。
K的取法:
常用的方法是从k=1开始,使用检验集估计分类器的误差率。重复该过程,每次K增值1,允许增加一个近邻。选取产生最小误差率的K。
一般k的取值不超过20,上限是n的开方,随着数据集的增大,K的值也要增大。
通用的K值确定方法如下:
- 交叉验证: 这是确定 k 值的最常用方法。对于每一个可能的 k 值,使用交叉验证计算模型的预测错误率,选择错误率最低的 k 值。
- 启发式方法: 有时,可以选择 sqrt(n)作为起始点,其中 n 是训练样本的数量。这只是一个粗略的估计,通常需要进一步验证。
- 误差曲线: 画出不同 k 值对应的误差率曲线,选择误差变化开始平稳的点。
- 领域知识: 在某些应用中,基于领域知识和经验选择 k 值可能更为合适。
三、KD树效率优化
上述原始算法复杂度为0(n)比较大,所以引出了下文的kd树结构优化KNN是算法。
现实生活中有许多问题需要在多维数据的快速分析和快速搜索,对于这个问题最常用的方法是所谓的kd树。在k-d树中进行数据的查找也是特征匹配的重要环节,其目的是检索在k-d树中与查询点距离最近的数据点。
说到KD树优化就不赘述了,老本行3D渲染中常用的三维空间加速结构,重点就是根据KD树结构快速定位节点,突发奇想是不是BVH、R-Tree等能够更加优化KNN算法,有时间的话实践一下试试。
四、小结
具体py实现建议采用sklearn库应用,详细代码可见其他代码实现的文章