在七月算法报的班,老师讲的蛮好。好记性不如烂笔头,关键内容还是记录一下吧,课程入口,感兴趣的同学可以学习一下。
-------------------------------------------------------------------------------------------------------------------------------
相机的最基础模型就是针孔相机模型
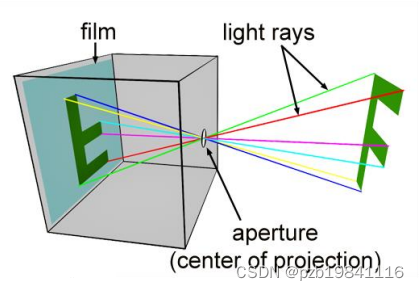
针孔相机的数学模型
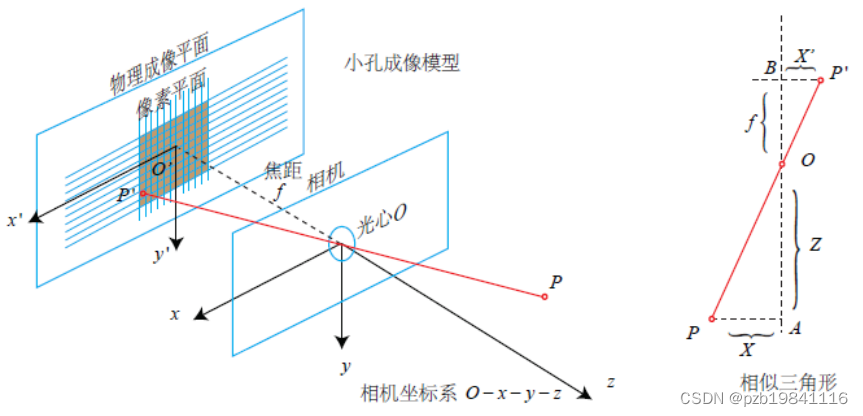
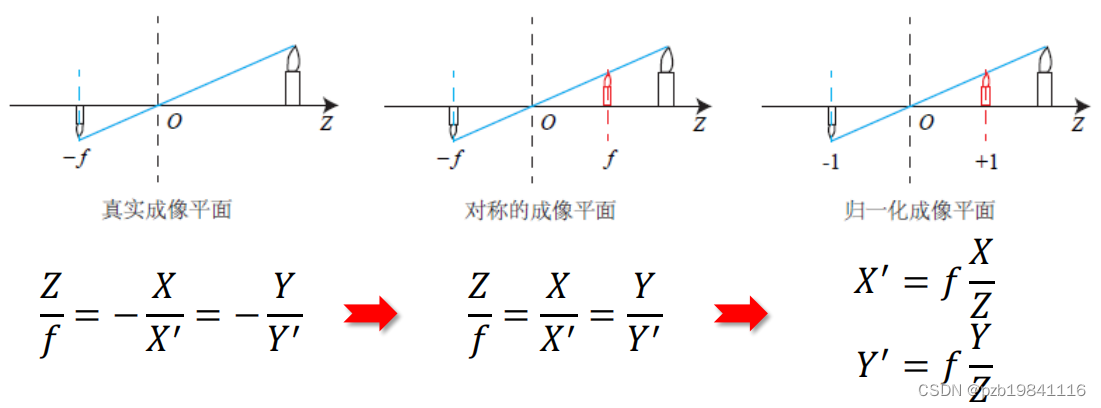
实物高度与成像高度之间的换算公式
像素坐标系
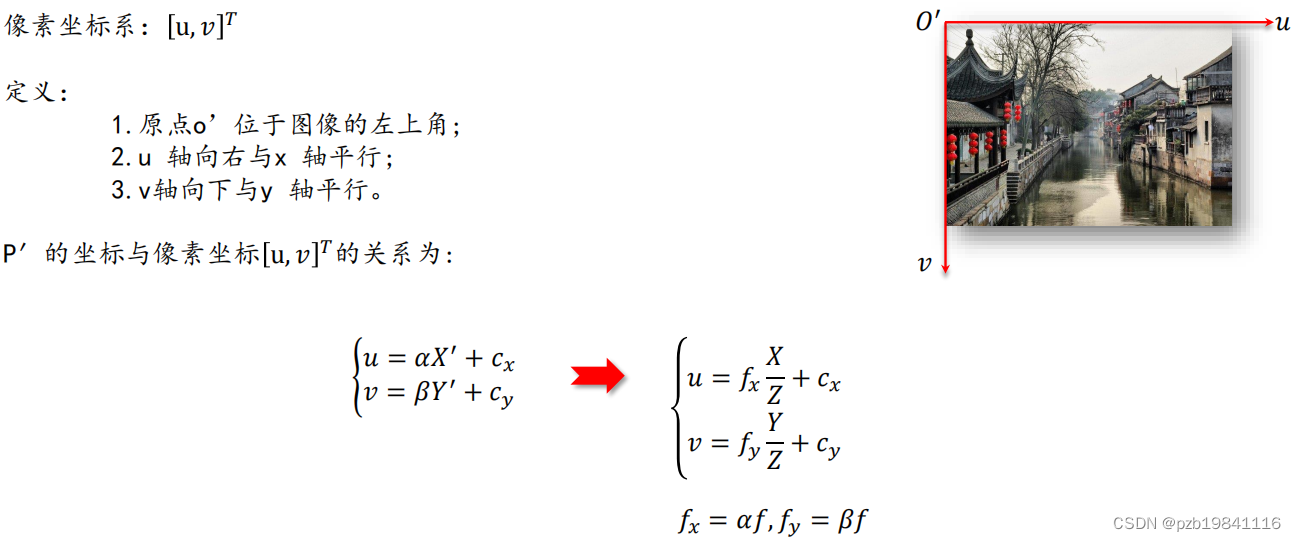
相机的内参矩阵,用于计算世界坐标系与像素坐标系之间的转换。

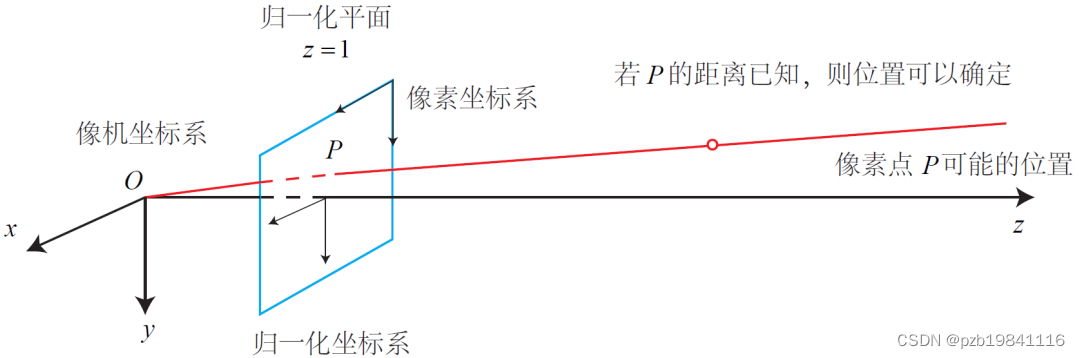
图像中的一个点,世界坐标系上一条射线上的点均匹配,所以说丢失了距离信息。
世界坐标系、相机坐标系与像素坐标系之间的关系。
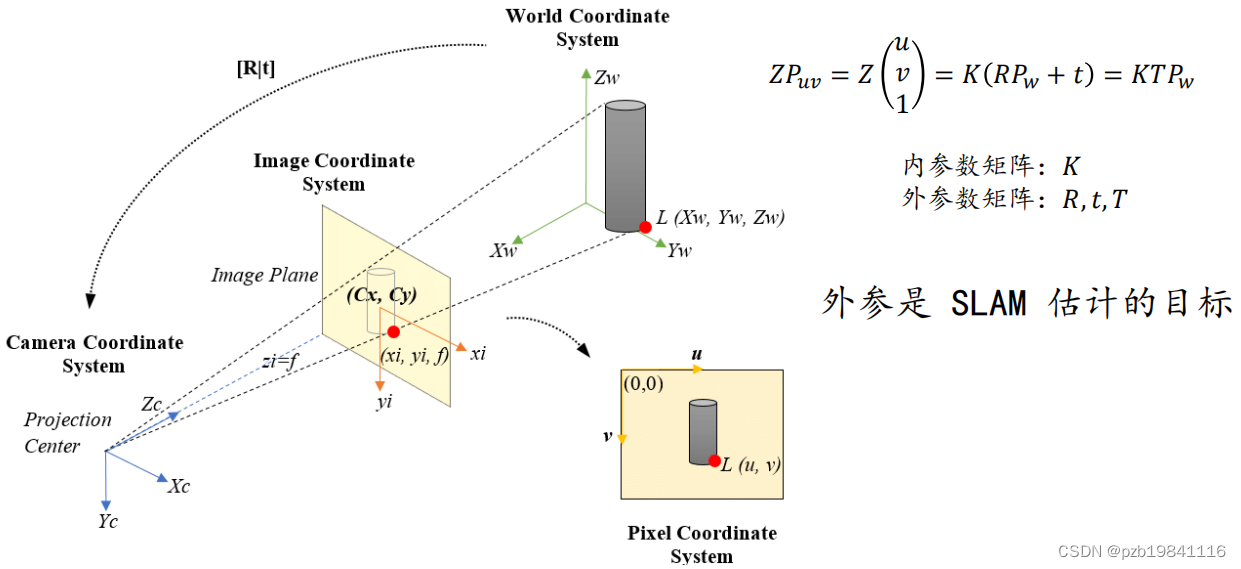
内参矩阵通过相机标定即可获取,或出厂时厂家提供,SLAM需要解决的是几个外参矩阵的计算。
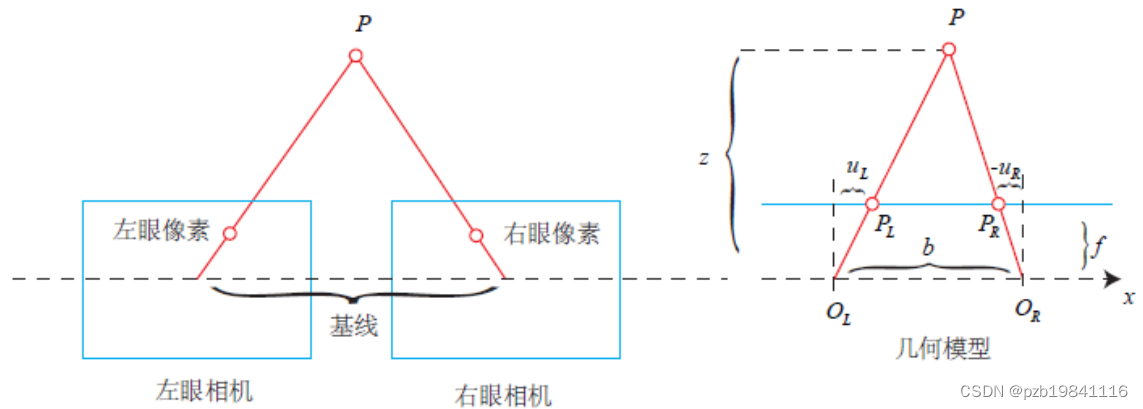
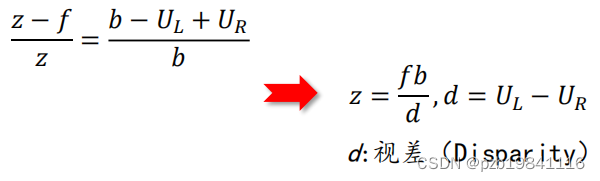
双目相机的原理及计算距离的方法
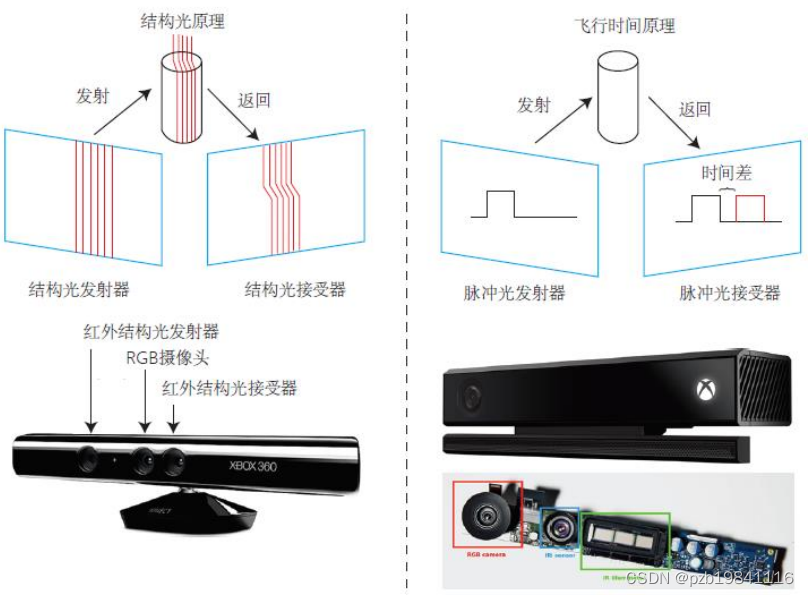
两种RGB-D相机的工作原理(结构光与飞行时间)
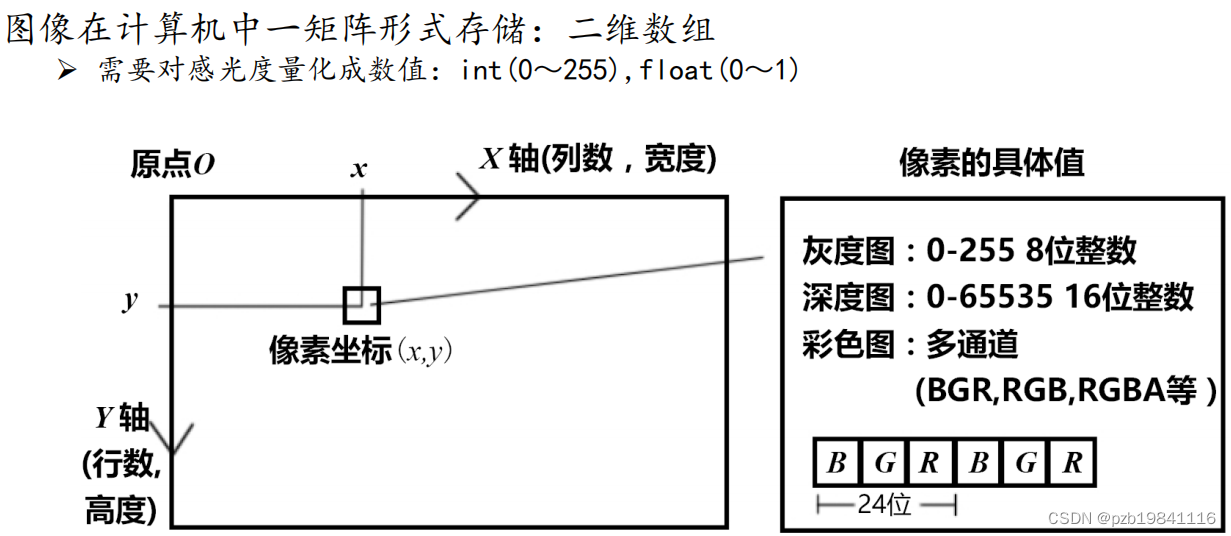
图像存储的方法
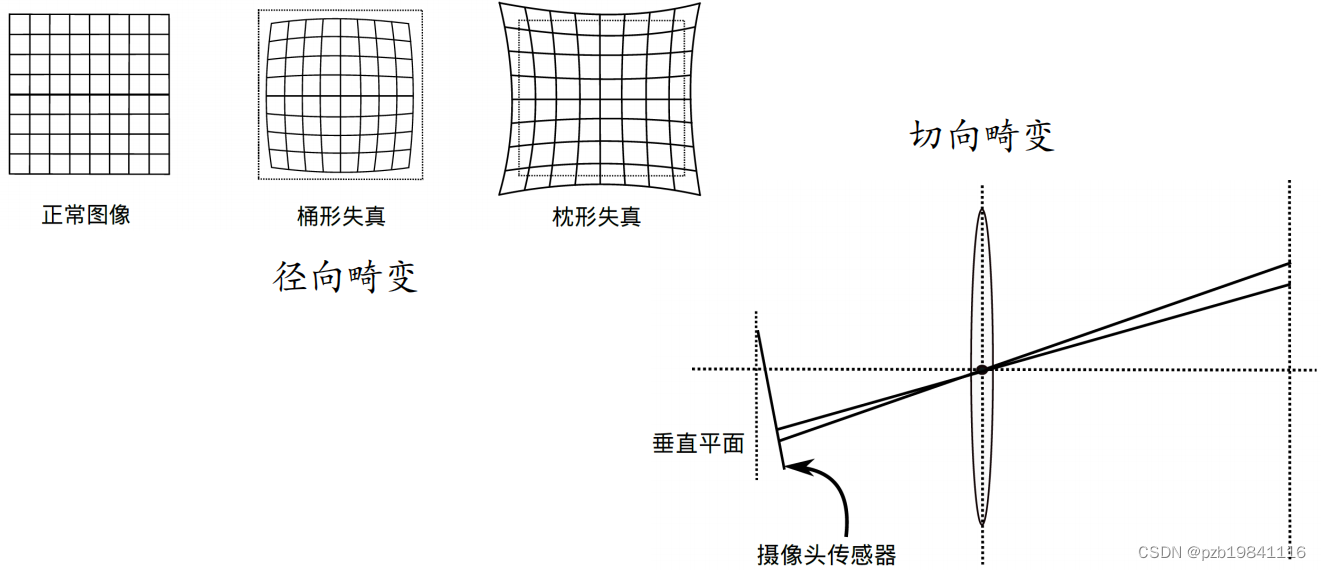
图像畸变的定义:
是指成像过程中所产生的图像像元的几何位置相对于参照系统(地面实际位置或地形图)发生的挤压、伸展、偏移和扭曲等变形,使图像的几何位置、尺寸、形状、方位等发生改变。针孔前的镜头会引入畸变:

图像变形与畸变的分类
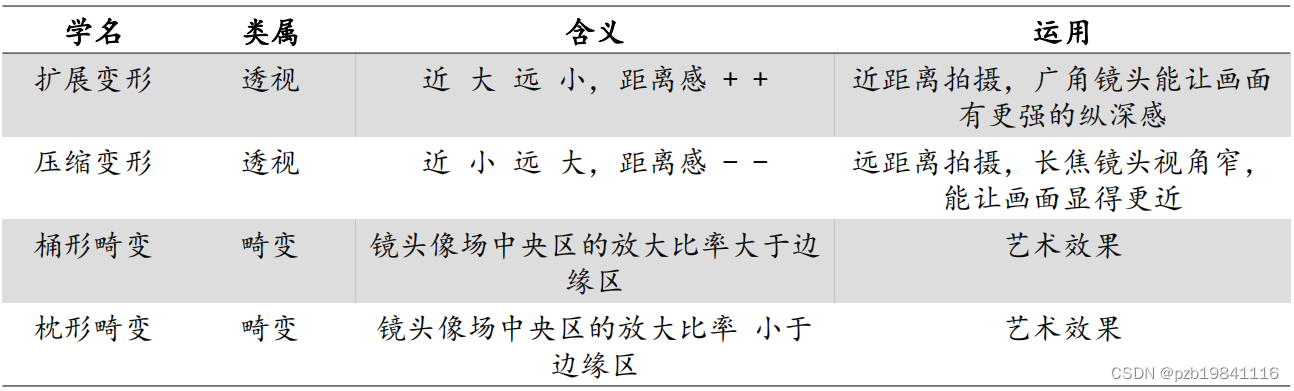
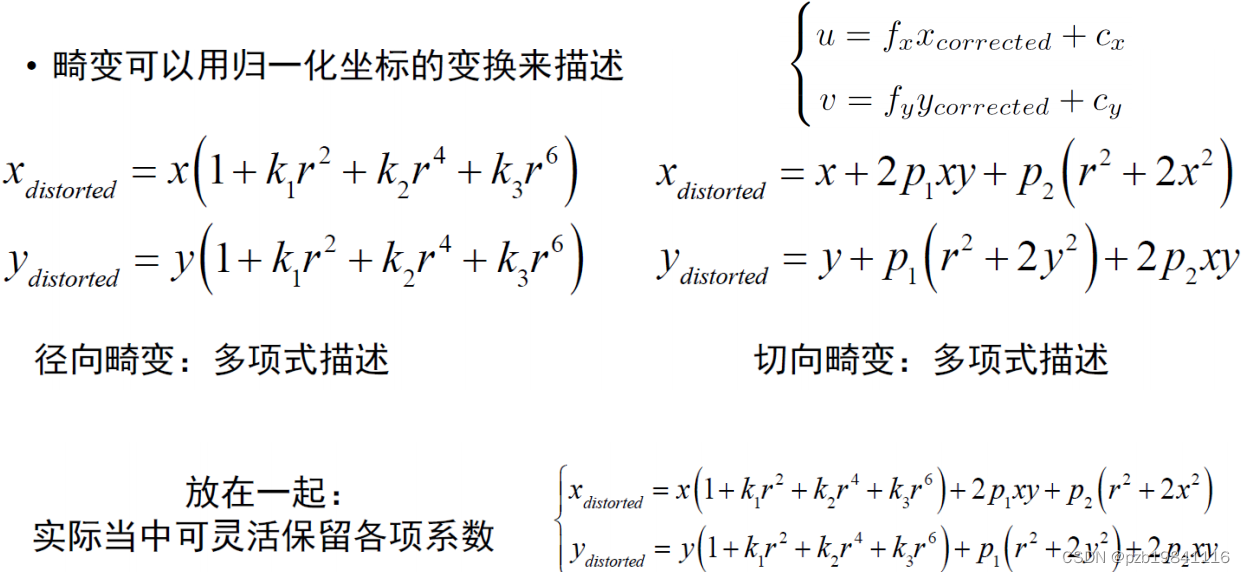
径向畸变与切向畸变
透镜自身形状对光线传播的影响——径向畸变;组装过程中,透镜和成像平面未完成平行——切向畸变
图像校准的数学方法
![[保研/考研机试] 杨辉三角形 西北工业大学复试上机题 C++实现](https://img-blog.csdnimg.cn/8bb3bd8896b44b76ba106363166112ab.png)