一、说明
Hadabot Hadabot是一个学习ROS2和机器人技术的机器人套件。使用 Hadabot,您将能够以最小的挫败感和恐吓来构建和编程物理 ROS2 机器人。Hadabot套件目前正在开发中。它将仅针对ROS2功能,并强调基于Web的用户界面。
随着开发的进展,我将每周以黑客示例和解释的形式发布一到两次更新。
在这篇文章中,我们将执行以下操作:
-
重新总结基于 Web 的全新 Hadabot 体验界面背后的基本原理。
-
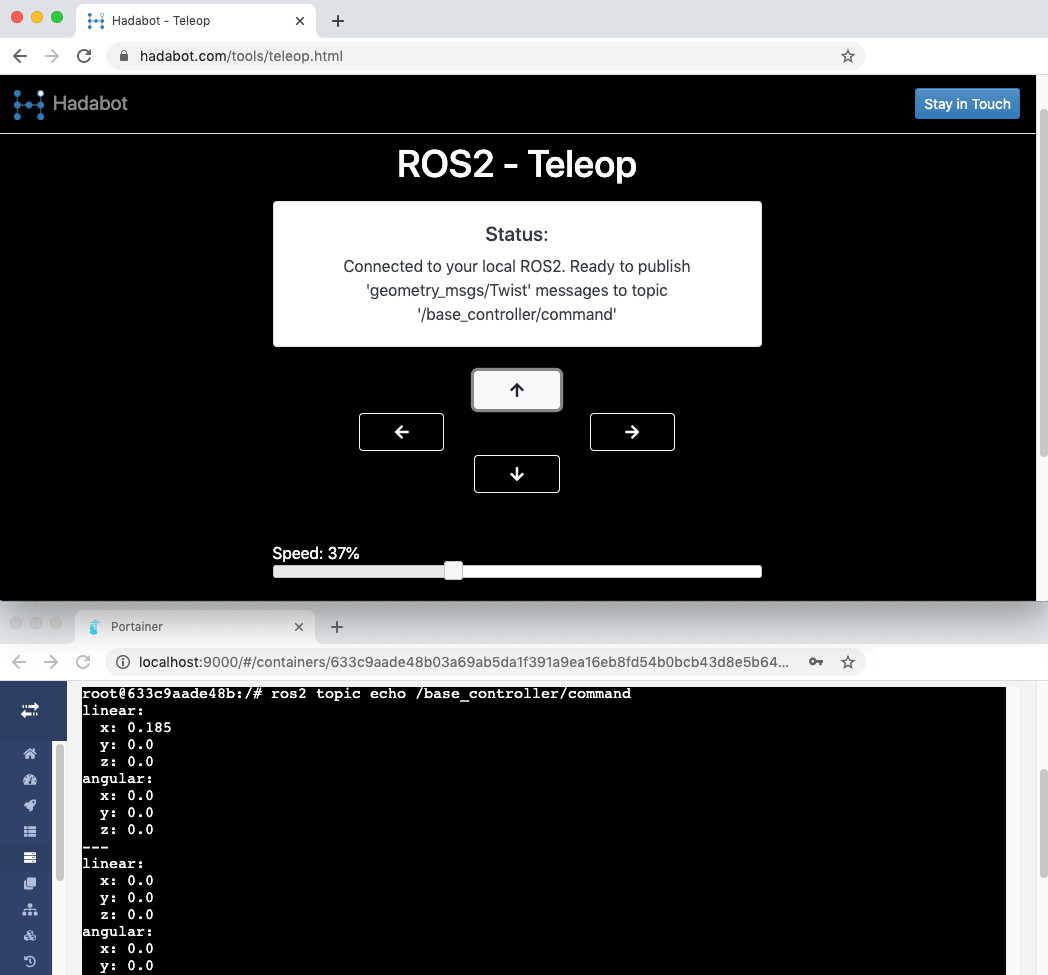
展示适用于 ROS2 的 Hadabot 基于 Web 的远程控制器。
-
解释远程控制器的工作原理。
-
解释远程控制器如何与 Hadabot 开发工作相吻合。
二、全新 Hadabot 体验的 Web 界面
我的目标是创建一个简单、无挫折的机器人套件来构建和编程支持 ROS2 的机器人。
通过只关注用户界面的 Web 浏览器,我可以确保更一致的用户体验,尽管使用了各种底层操作系统和开发环境。
为了简化设置,Hadabot 利用 Docker 容器来启动预烘焙工具和 ROS2 环境。容器本质上在安全的沙盒环境中运行,可以轻松关闭和重新启动,而不会污染主机系统。
2.2. 使用基于 Web 的 ROS2 远程控制器
遥控或遥控控制器是一种遥控操纵杆,用于控制另一个物理实体,例如机器人、遥控车、相机等。我们计划最终将此远程控制器用于 Hadabot(稍后会详细介绍)。
让我们启动一个基于 Web 的 ROS2 远程控制器进行展示和讲述。
2.3 一.更新,启动/重新启动Hadabot软件堆栈,启动Web-bash ROS2终端
7 年 2020 月 <> 日更新:我们不再需要设置 web-bash,因为我们现在在基于 Web 浏览器的 VSCode 环境中使用 bash 终端功能。
刚开始使用哈达机器人?
我们需要(a)设置Docker,(b)克隆Hadabot存储库,然后(c)启动一个web-bash ROS2终端。
如果您是回归的哈达机器人黑客
您已经克隆了 hadabot_main.git 存储库,并且正在运行 Hadabot Docker 堆栈(通过 docker-compose)。
在主机系统上使用以下命令停止您可能正在运行的 Docker 堆栈,获取最新的 Hadabot 存储库代码,然后使用最新更改重新启动 Docker 堆栈。
-
$ cd hadabot_main/docker $ docker-compose down -v $ git fetch $ git merge origin/master $ docker-compose build $ docker-compose up -d然后选择步骤以 (c) 在 Web 浏览器中启动 bash 终端。
2.4.运行我们的引导式脚本以启动远程控制器
此时,您应该已经准备好了一个网络bash终端。
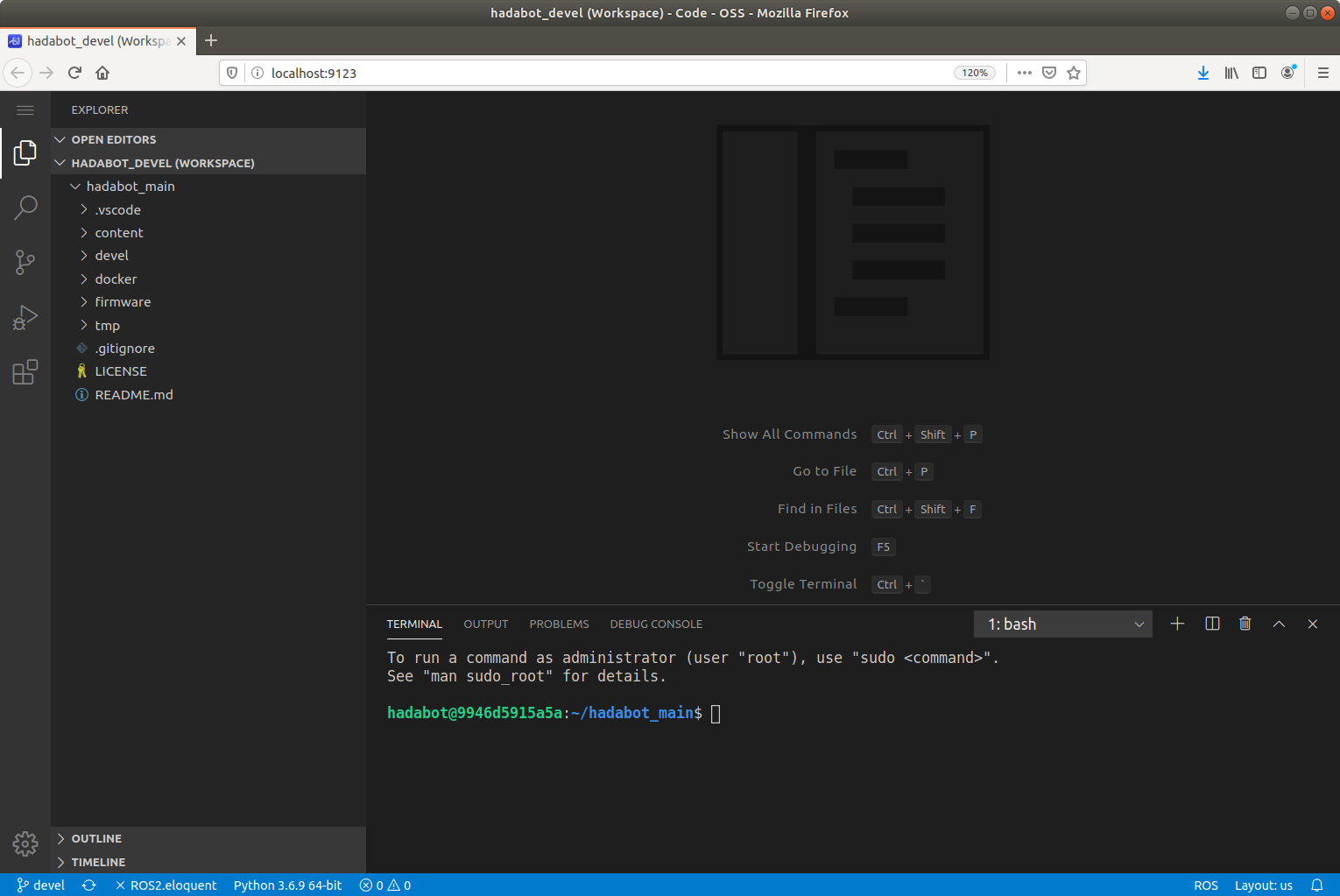
In the web-bash terminal you created above, run our guided script and follow the simple instructions:
root@id:/# python3 content/pt2/step_1.py
Upon completing the instructions from the guided script, you should have 2 browser windows open that showcases the operation of the Hadabot teleop controller running on ROS2.
三、远程控制器在做什么
ROS系统由节点组成(即单个机器人进程,如果你愿意的话)。ROS节点主要通过发布者-订阅者方式传递消息来相互通信。
我们启动的远程控制器发布消息,可以命令机器人如何移动。具体而言,发布了 geometry_msgs/msg/Twist 消息类型。Twist 指示 6 自由度机器人如何在 x、y、z 方向上移动,以及如何沿其 x、y 和 z 轴旋转。
单击相应的箭头按钮后,远程控制器将被硬编码,以通过 Twist 消息将移动命令发布到 /base_controller/command 主题。
在我们的 web-bash 终端中,我们使用 ros2 主题回显 /base_controller/command 在按下远程控制器上的按钮时回显并验证已发布的消息。
当按下向上/向下箭头按钮时,我们希望在 x 方向上向前/向后移动,因此我们发布一个正/负线性 X 值的 Twist 消息。
当按下左/右时,我们要绕 z 轴旋转。
松开按钮后,我们发送 Twist 消息以停止所有移动。
四、 远程操作 ROS2 示例如何工作
虽然 ROS 节点以分布式方式运行,但它本身并不在 Web 浏览器环境中运行。相反,我们利用了一个web-to-ROS桥接服务器,又名ros2-web-bridge,由Robot Web Tools创建和开源。
这个 ros2-web-bridge 服务器通过 docker-compose 作为 Docker 容器运行,允许非 ROS 应用程序使用基于 JSON 的接口将 ROS 主题发布到底层 ROS 系统。
Hadabot teleop controller是一个javascript应用程序(主要受这个keyboardteleopjs项目的启发),它与ros2-web-bridge服务器创建websocket连接。然后,远程控制器使用该基于 JSON 的接口通过 websocket 连接到 ros2-web-bridget 发布 ROS Twist 消息。
当 ros2-web-bridge 收到基于 JSON 的 Twist 消息(通过与 teleop 控制器 Web 应用程序的 websockets 连接)时,它会将它们本地发布到 ROS2 系统上,该系统可用于 ros2 主题 echo... 命令和任何其他要处理的 ROS 节点。
ros2网桥如何发布ROS消息?ros2-web-bridge作为websocket服务器(与客户端连接(如我们的teleop控制器)以及ROS2节点运行。
在 web-bash ROS2 终端中,如果您列出节点(不要忘记首先源 /opt/ros/eloquent/setup.bash 以激活 ROS2):
root@id:/# ros2 node list
...您将看到 /ros2_web_bridge 节点正在运行。
五、 远程控制器如何与 Hadabot 的发展相吻合
Twist 消息过度概括为命令只有 2 个自由度的轮式机器人,例如汽车或差速器驱动机器人 - 它只能向前和向后移动并向左和向右旋转。汽车不能线性地向左或向右移动,也不能向上或向下飞行。出于所有实际目的,它不能像飞机或无人机那样俯仰或滚动。
正在开发的新Hadabot套件将由ROS2驱动的差速器驱动机器人。因此,如前所述,差速驱动机器人将具有2个自由度 - 能够沿Hadabot的x轴(即向前和向后)移动,以及沿其z轴左右转动。
我们计划提供示例和代码来展示自主规划和运动。但作为自主行为的垫脚石,我们需要有一种手动远程控制 Hadabot 的方法。我们将使用此远程控制器来做到这一点。
此外,我们提到新的 Hadabot 将基于 ESP32 微控制器。ros2-web-bridge服务器将帮助我们连接ROS2到ESP32,ESP<>控制物理Hadabot平台上的电气元件。
6.六、 结论
要从 hadabot_main/docker 停止并清理正在运行的 Docker 容器,请执行以下操作:
$ docker-compose down -v
恭喜您启动了在 ROS2 上运行的基于 Web 的远程控制器!在这篇文章中,我们介绍了以下内容:
-
启动基于 Web 的远程控制器,用于发布 ROS2 Twist 消息。
-
解释了远程控制器如何与作为 Docker 容器在本地运行的 ROS2 系统配合使用。
-
将这个远程控制器示例与正在进行的 Hadabot 开发联系起来,目标是创建一个简单、无挫折的机器人套件来构建和学习 ROS2 和机器人技术。
像往常一样,如果您有建议,意见,或者只是想打个招呼,请不要犹豫,伸出援手 - 你好AT hadabot DOT com。
你的好奇心被进一步激起了吗?通过上方导航栏中的保持联系按钮或下方页脚,随时了解 Hadabot 的未来发展。与其他黑客和机器人专家分享哈达机器人。