[oneAPI] 手写数字识别-GAN
- 手写数字识别
- 参数与包
- 加载数据
- 模型
- 训练过程
- 结果
- oneAPI
比赛:https://marketing.csdn.net/p/f3e44fbfe46c465f4d9d6c23e38e0517
Intel® DevCloud for oneAPI:https://devcloud.intel.com/oneapi/get_started/aiAnalyticsToolkitSamples/
手写数字识别
使用了pytorch以及Intel® Optimization for PyTorch,通过优化扩展了 PyTorch,使英特尔硬件的性能进一步提升,让手写数字识别问题更加的快速高效
使用MNIST数据集,该数据集包含了一系列以黑白图像表示的手写数字,每个图像的大小为28x28像素,数据集组成如下:
- 训练集:包含60,000个图像和标签,用于训练模型。
- 测试集:包含10,000个图像和标签,用于测试模型的性能。
每个图像都被标记为0到9之间的一个数字,表示图像中显示的手写数字。这个数据集常常被用来验证图像分类模型的性能,特别是在计算机视觉领域。
参数与包
import os
import torch
import torchvision
import torch.nn as nn
from torchvision import transforms
from torchvision.utils import save_imageimport intel_extension_for_pytorch as ipex# Device configuration
device = torch.device('xpu' if torch.cuda.is_available() else 'cpu')# Hyper-parameters
latent_size = 64
hidden_size = 256
image_size = 784
num_epochs = 200
batch_size = 100
sample_dir = 'samples'
加载数据
# Create a directory if not exists
if not os.path.exists(sample_dir):os.makedirs(sample_dir)# Image processing
# transform = transforms.Compose([
# transforms.ToTensor(),
# transforms.Normalize(mean=(0.5, 0.5, 0.5), # 3 for RGB channels
# std=(0.5, 0.5, 0.5))])
transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize(mean=[0.5], # 1 for greyscale channelsstd=[0.5])])# MNIST dataset
mnist = torchvision.datasets.MNIST(root='./data/',train=True,transform=transform,download=True)# Data loader
data_loader = torch.utils.data.DataLoader(dataset=mnist,batch_size=batch_size,shuffle=True)
模型
# Discriminator
D = nn.Sequential(nn.Linear(image_size, hidden_size),nn.LeakyReLU(0.2),nn.Linear(hidden_size, hidden_size),nn.LeakyReLU(0.2),nn.Linear(hidden_size, 1),nn.Sigmoid())# Generator
G = nn.Sequential(nn.Linear(latent_size, hidden_size),nn.ReLU(),nn.Linear(hidden_size, hidden_size),nn.ReLU(),nn.Linear(hidden_size, image_size),nn.Tanh())
训练过程
# Device setting
D = D.to(device)
G = G.to(device)# Binary cross entropy loss and optimizer
criterion = nn.BCELoss()
d_optimizer = torch.optim.Adam(D.parameters(), lr=0.0002)
g_optimizer = torch.optim.Adam(G.parameters(), lr=0.0002)'''
Apply Intel Extension for PyTorch optimization against the model object and optimizer object.
'''
D, d_optimizer = ipex.optimize(D, optimizer=d_optimizer)
G, g_optimizer = ipex.optimize(G, optimizer=g_optimizer)def denorm(x):out = (x + 1) / 2return out.clamp(0, 1)def reset_grad():d_optimizer.zero_grad()g_optimizer.zero_grad()# Start training
total_step = len(data_loader)
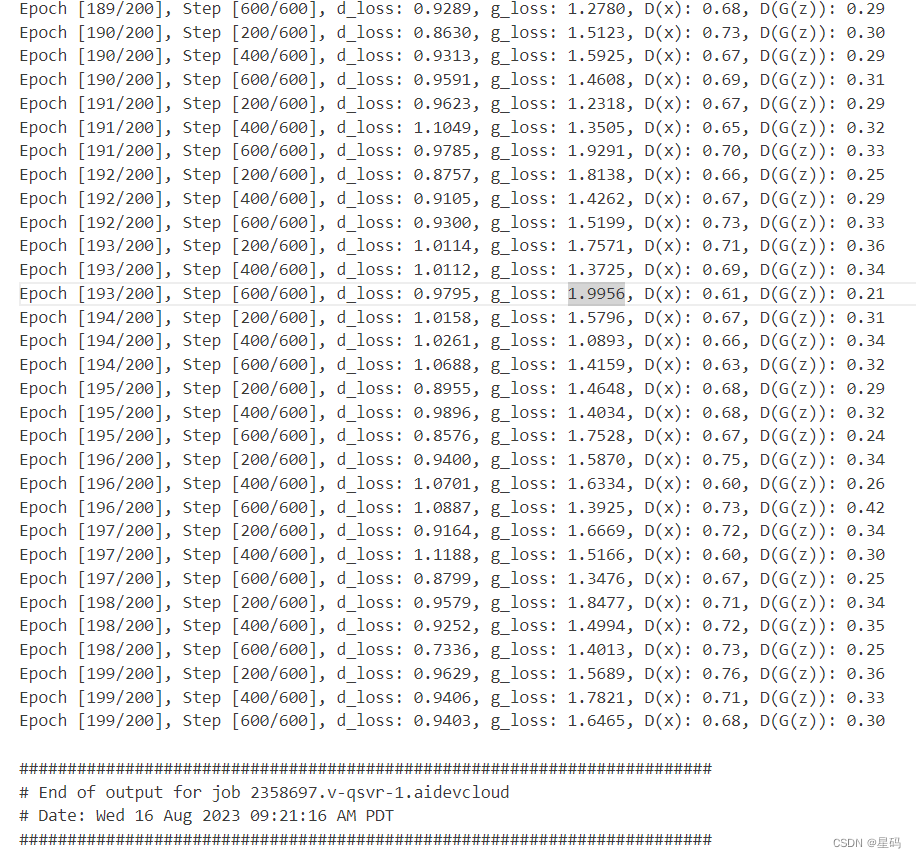
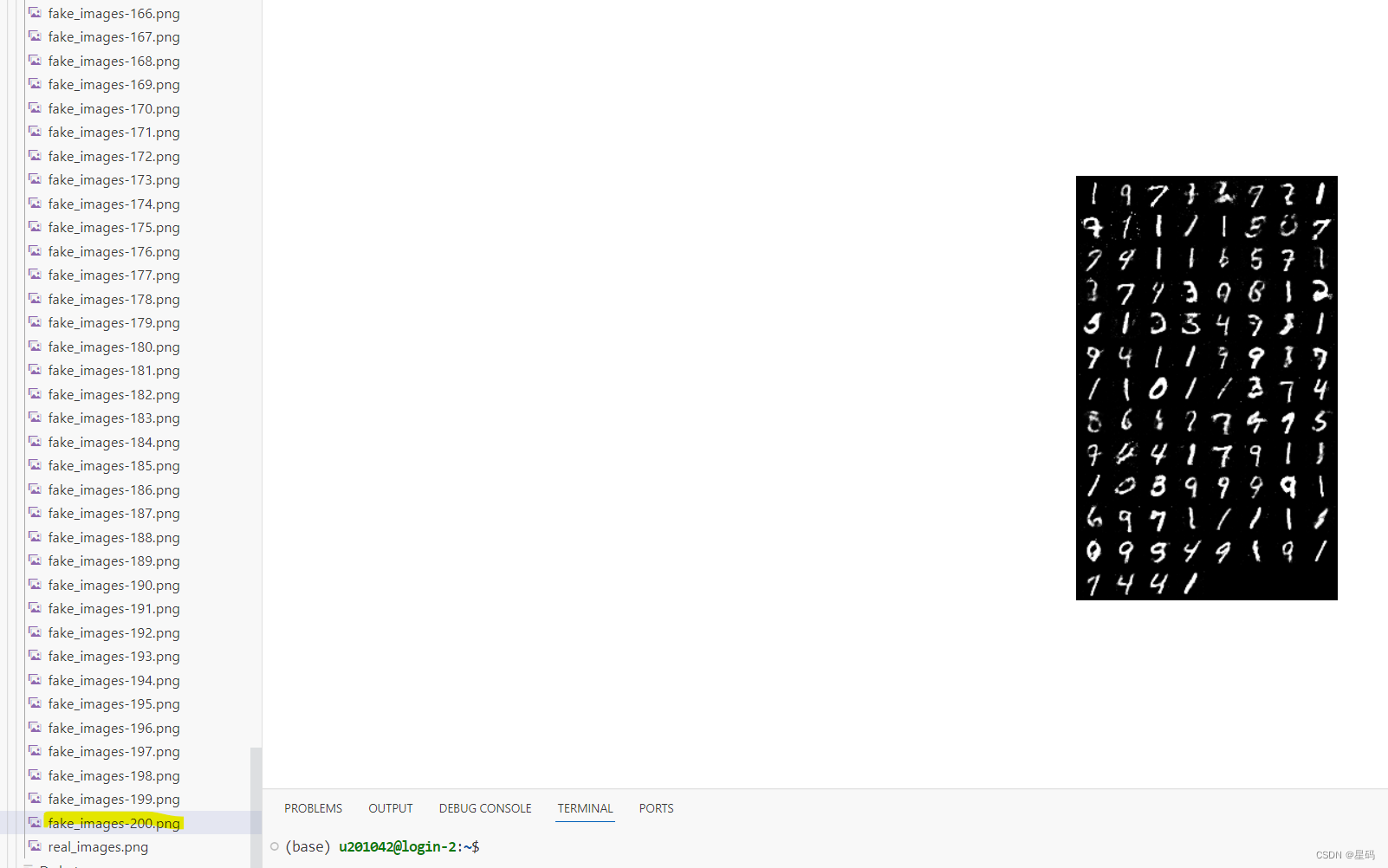
for epoch in range(num_epochs):for i, (images, _) in enumerate(data_loader):images = images.reshape(batch_size, -1).to(device)# Create the labels which are later used as input for the BCE lossreal_labels = torch.ones(batch_size, 1).to(device)fake_labels = torch.zeros(batch_size, 1).to(device)# ================================================================== ## Train the discriminator ## ================================================================== ## Compute BCE_Loss using real images where BCE_Loss(x, y): - y * log(D(x)) - (1-y) * log(1 - D(x))# Second term of the loss is always zero since real_labels == 1outputs = D(images)d_loss_real = criterion(outputs, real_labels)real_score = outputs# Compute BCELoss using fake images# First term of the loss is always zero since fake_labels == 0z = torch.randn(batch_size, latent_size).to(device)fake_images = G(z)outputs = D(fake_images)d_loss_fake = criterion(outputs, fake_labels)fake_score = outputs# Backprop and optimized_loss = d_loss_real + d_loss_fakereset_grad()d_loss.backward()d_optimizer.step()# ================================================================== ## Train the generator ## ================================================================== ## Compute loss with fake imagesz = torch.randn(batch_size, latent_size).to(device)fake_images = G(z)outputs = D(fake_images)# We train G to maximize log(D(G(z)) instead of minimizing log(1-D(G(z)))# For the reason, see the last paragraph of section 3. https://arxiv.org/pdf/1406.2661.pdfg_loss = criterion(outputs, real_labels)# Backprop and optimizereset_grad()g_loss.backward()g_optimizer.step()if (i + 1) % 200 == 0:print('Epoch [{}/{}], Step [{}/{}], d_loss: {:.4f}, g_loss: {:.4f}, D(x): {:.2f}, D(G(z)): {:.2f}'.format(epoch, num_epochs, i + 1, total_step, d_loss.item(), g_loss.item(),real_score.mean().item(), fake_score.mean().item()))# Save real imagesif (epoch + 1) == 1:images = images.reshape(images.size(0), 1, 28, 28)save_image(denorm(images), os.path.join(sample_dir, 'real_images.png'))# Save sampled imagesfake_images = fake_images.reshape(fake_images.size(0), 1, 28, 28)save_image(denorm(fake_images), os.path.join(sample_dir, 'fake_images-{}.png'.format(epoch + 1)))# Save the model checkpoints
torch.save(G.state_dict(), 'G.ckpt')
torch.save(D.state_dict(), 'D.ckpt')
结果
oneAPI
import intel_extension_for_pytorch as ipex# Device configuration
device = torch.device('xpu' if torch.cuda.is_available() else 'cpu')# Device setting
D = D.to(device)
G = G.to(device)# Binary cross entropy loss and optimizer
criterion = nn.BCELoss()
d_optimizer = torch.optim.Adam(D.parameters(), lr=0.0002)
g_optimizer = torch.optim.Adam(G.parameters(), lr=0.0002)'''
Apply Intel Extension for PyTorch optimization against the model object and optimizer object.
'''
D, d_optimizer = ipex.optimize(D, optimizer=d_optimizer)
G, g_optimizer = ipex.optimize(G, optimizer=g_optimizer)