1.常用的几种loam算法
aloam 纯激光
lego_loam 纯激光 去除了地面
lio_sam imu+激光紧耦合
lvi_sam 激光+视觉
2.代码思路
2.1.特征点提取scanRegistration.cpp,这个文件的目的是为了根据曲率提取4种特征点和对当前点云进行预处理
输入是雷达点云话题
输出是 4种特征点点云和预处理后的当前点云
(1)带有点云线束id+在角度范围所处进度的全部有效点点云(因为雷达是旋转的,雷达旋转的进度)
(2)曲率比较大的特征点点云,2个点
(3)曲率一般大的特征点点云,20个点
(4)曲率比较小的面点点云
(5)一般面点点云,角点提取剩下的那些点
当输入雷达是16线雷达,去计算是哪条线id是通过计算俯仰角每2度算一根线去计算的
角度所处的进度,是根据水平角计算获得的
2.1.1选择雷达扫描半径范围内的点
pcl::PointCloud<pcl::PointXYZ> narrowed_scan;narrowed_scan.header = scan.header;if (min_range >= max_range){ROS_ERROR_ONCE("min_range>=max_range @(%lf, %lf)", min_range, max_range);return scan;}double square_min_range = min_range * min_range;double square_max_range = max_range * max_range;for (pcl::PointCloud<pcl::PointXYZ>::const_iterator iter = scan.begin(); iter != scan.end(); ++iter){const pcl::PointXYZ &p = *iter;// 点云点到原点的位置的欧式距离double square_distance = p.x * p.x + p.y * p.y;if (square_min_range <= square_distance && square_distance <= square_max_range){narrowed_scan.points.push_back(p);}}return narrowed_scan;
2.1.2计算水平角角度范围
int cloudSize = laserCloudIn.points.size();
// 起始点角度 atan2范围是-pi~pi
float startOri = -atan2(laserCloudIn.points[0].y, laserCloudIn.points[0].x);
// 终止点角度
float endOri = -atan2(laserCloudIn.points[cloudSize - 1].y,laserCloudIn.points[cloudSize - 1].x) +2 * M_PI;
// 总有些例外 ,比如这里大于3pi 和小于pi 就要做一些调整到合理的范围
if (endOri - startOri > 3 * M_PI)
{endOri -= 2 * M_PI;
}
else if (endOri - startOri < M_PI)
{endOri += 2 * M_PI;
}
Eigen::Vector2f anglerange;
anglerange[0] = startOri;
anglerange[1] = endOri;
return anglerange;
2.1.3每条线上点的计算范围
// 计算的范围 起始点是从第5个点开始 终止点是倒数第6个点
for (int i = 0; i < N_SCANS; i++)
{// 第一根线就是 0+5scanStartInd[i] = laserCloud->size() + 5;*laserCloud += laserCloudScans[i];// 第一根线就是第一根线的点数量-6scanEndInd[i] = laserCloud->size() - 6;
}
2.1.4计算每个点的曲率
// 开始计算曲率for (int i = 5; i < cloudSize - 5; i++){// 每一小段计算了弧长float diffX = laserCloud->points[i - 5].x + laserCloud->points[i - 4].x + laserCloud->points[i - 3].x + laserCloud->points[i - 2].x + laserCloud->points[i - 1].x - 10 * laserCloud->points[i].x + laserCloud->points[i + 1].x + laserCloud->points[i + 2].x + laserCloud->points[i + 3].x + laserCloud->points[i + 4].x + laserCloud->points[i + 5].x;float diffY = laserCloud->points[i - 5].y + laserCloud->points[i - 4].y + laserCloud->points[i - 3].y + laserCloud->points[i - 2].y + laserCloud->points[i - 1].y - 10 * laserCloud->points[i].y + laserCloud->points[i + 1].y + laserCloud->points[i + 2].y + laserCloud->points[i + 3].y + laserCloud->points[i + 4].y + laserCloud->points[i + 5].y;float diffZ = laserCloud->points[i - 5].z + laserCloud->points[i - 4].z + laserCloud->points[i - 3].z + laserCloud->points[i - 2].z + laserCloud->points[i - 1].z - 10 * laserCloud->points[i].z + laserCloud->points[i + 1].z + laserCloud->points[i + 2].z + laserCloud->points[i + 3].z + laserCloud->points[i + 4].z + laserCloud->points[i + 5].z;// 存储起始+5到终止-6每个点对应的曲率cloudCurvature[i] = diffX * diffX + diffY * diffY + diffZ * diffZ;// 每个点的索引cloudSortInd[i] = i;// 标记cloudNeighborPicked[i] = 0;cloudLabel[i] = 0;}
2.1.4对每个点的曲率进行排序
float t_q_sort = 0;
// 遍历每个scan
for (int i = 0; i < N_SCANS; i++)
{// 点云点数小于6个就认为 没有有效的点 就进行continueif (scanEndInd[i] - scanStartInd[i] < 6){continue;}// 用来存储不太平整的点pcl::PointCloud<PointType>::Ptr surfPointsLessFlatScan(new pcl::PointCloud<PointType>);// 将每个scan分成6等分for (int j = 0; j < 6; j++){// 每个等分的起点和结束点// 起点idint sp = scanStartInd[i] + (scanEndInd[i] - scanStartInd[i]) * j / 6;// 结束点idint ep = scanStartInd[i] + (scanEndInd[i] - scanStartInd[i]) * (j + 1) / 6 - 1;TicToc t_tmp;// 对点云曲率进行索引排序,小的在前,大的在后std::sort(cloudSortInd + sp, cloudSortInd + ep + 1, comp);t_q_sort += t_tmp.toc();int largestPickedNum = 0;// 挑选曲率比较大的部分for (int k = ep; k >= sp; k--){// 排序后顺序就乱了,这个时候索引的作用就体现出来了int ind = cloudSortInd[k];// 看看这个点是否是有效点,同时曲率是否大于阈值if (cloudNeighborPicked[ind] == 0 &&cloudCurvature[ind] > 0.1){largestPickedNum++;// //目的是为了当前帧大曲率的点和上一帧小一点曲率的点建立约束// 每段选两个曲率大的点if (largestPickedNum <= 2){cloudLabel[ind] = 2;// cornerPointsSharp存放大曲率的点cornerPointsSharp.push_back(laserCloud->points[ind]);cornerPointsLessSharp.push_back(laserCloud->points[ind]);}// 以及20个曲率稍微大一点的点else if (largestPickedNum <= 20){// label置1表示曲率稍微大一点的点cloudLabel[ind] = 1;cornerPointsLessSharp.push_back(laserCloud->points[ind]);}// 超过20个就算了else{break;}// 这个点被选中了,pick标志位置1cloudNeighborPicked[ind] = 1;// 为了保证特征点不过渡集中,将选中的点周围5个点都置为1,避免后续会选到for (int l = 1; l <= 5; l++){// 查看相邻点距离是否差异过大,如果差异过大说明点云在此不连续,是特征边缘,就会是新的特征,因此就不置位了float diffX = laserCloud->points[ind + l].x - laserCloud->points[ind + l - 1].x;float diffY = laserCloud->points[ind + l].y - laserCloud->points[ind + l - 1].y;float diffZ = laserCloud->points[ind + l].z - laserCloud->points[ind + l - 1].z;if (diffX * diffX + diffY * diffY + diffZ * diffZ > 0.05){break;}cloudNeighborPicked[ind + l] = 1;}// 下面同理for (int l = -1; l >= -5; l--){float diffX = laserCloud->points[ind + l].x - laserCloud->points[ind + l + 1].x;float diffY = laserCloud->points[ind + l].y - laserCloud->points[ind + l + 1].y;float diffZ = laserCloud->points[ind + l].z - laserCloud->points[ind + l + 1].z;if (diffX * diffX + diffY * diffY + diffZ * diffZ > 0.05){break;}cloudNeighborPicked[ind + l] = 1;}}}// 下面开始挑选面点int smallestPickedNum = 0;for (int k = sp; k <= ep; k++){int ind = cloudSortInd[k];// 确定这个点没有被pack 并且曲率小于阈值if (cloudNeighborPicked[ind] == 0 &&cloudCurvature[ind] < 0.1){// -1是认为平坦的点cloudLabel[ind] = -1;surfPointsFlat.push_back(laserCloud->points[ind]);smallestPickedNum++;// 每个等分取4个比较平坦的面点// 这里不区分平坦和比较平坦,因为剩下的点label默认是0就是比较平坦if (smallestPickedNum >= 4){break;}cloudNeighborPicked[ind] = 1;// 下面同理 除非曲率在0.05-0.1之间的点 否则就要标记后5个点for (int l = 1; l <= 5; l++){float diffX = laserCloud->points[ind + l].x - laserCloud->points[ind + l - 1].x;float diffY = laserCloud->points[ind + l].y - laserCloud->points[ind + l - 1].y;float diffZ = laserCloud->points[ind + l].z - laserCloud->points[ind + l - 1].z;if (diffX * diffX + diffY * diffY + diffZ * diffZ > 0.05){break;}cloudNeighborPicked[ind + l] = 1;}// 标记前5个点for (int l = -1; l >= -5; l--){float diffX = laserCloud->points[ind + l].x - laserCloud->points[ind + l + 1].x;float diffY = laserCloud->points[ind + l].y - laserCloud->points[ind + l + 1].y;float diffZ = laserCloud->points[ind + l].z - laserCloud->points[ind + l + 1].z;if (diffX * diffX + diffY * diffY + diffZ * diffZ > 0.05){break;}cloudNeighborPicked[ind + l] = 1;}}}for (int k = sp; k <= ep; k++){// 除了角点 其它的点都是一般平坦的点云if (cloudLabel[k] <= 0){surfPointsLessFlatScan->push_back(laserCloud->points[k]);}}}pcl::PointCloud<PointType> surfPointsLessFlatScanDS;pcl::VoxelGrid<PointType> downSizeFilter;// 一般平坦的点比较多,所以这里做一个体素滤波downSizeFilter.setInputCloud(surfPointsLessFlatScan);downSizeFilter.setLeafSize(0.2, 0.2, 0.2);downSizeFilter.filter(surfPointsLessFlatScanDS);surfPointsLessFlat += surfPointsLessFlatScanDS;
}
printf("sort q time %f \n", t_q_sort);
2.1.5 发布4种特征点及插入标志的整体点云
// 分别将当前点云 四种特征的点云发布出去
sensor_msgs::PointCloud2 laserCloudOutMsg;
// 1.整体的点云 对每个点打了标签(哪一根线id+在角度范围所处的一个进度)
pcl::toROSMsg(*laserCloud, laserCloudOutMsg);
laserCloudOutMsg.header.stamp = laserCloudMsg->header.stamp;
laserCloudOutMsg.header.frame_id = "/map";
pubLaserCloud.publish(laserCloudOutMsg);sensor_msgs::PointCloud2 cornerPointsSharpMsg;
// 2.大曲率特征点
pcl::toROSMsg(cornerPointsSharp, cornerPointsSharpMsg);
cornerPointsSharpMsg.header.stamp = laserCloudMsg->header.stamp;
cornerPointsSharpMsg.header.frame_id = "/map";
pubCornerPointsSharp.publish(cornerPointsSharpMsg);sensor_msgs::PointCloud2 cornerPointsLessSharpMsg;
// 3.曲率稍微大一点的特征点
pcl::toROSMsg(cornerPointsLessSharp, cornerPointsLessSharpMsg);
cornerPointsLessSharpMsg.header.stamp = laserCloudMsg->header.stamp;
cornerPointsLessSharpMsg.header.frame_id = "/map";
pubCornerPointsLessSharp.publish(cornerPointsLessSharpMsg);sensor_msgs::PointCloud2 surfPointsFlat2;
// 4.平坦的点
pcl::toROSMsg(surfPointsFlat, surfPointsFlat2);
surfPointsFlat2.header.stamp = laserCloudMsg->header.stamp;
surfPointsFlat2.header.frame_id = "/map";
pubSurfPointsFlat.publish(surfPointsFlat2);
// 5.一般平坦的点
sensor_msgs::PointCloud2 surfPointsLessFlat2;
pcl::toROSMsg(surfPointsLessFlat, surfPointsLessFlat2);
surfPointsLessFlat2.header.stamp = laserCloudMsg->header.stamp;
surfPointsLessFlat2.header.frame_id = "/map";
pubSurfPointsLessFlat.publish(surfPointsLessFlat2);
2.2.激光里程计laserOdometry.cpp
(1)对特征点提取后的5个点云进行回调并存放到队列里,并同时转成pcl点云格式
(2)两次迭代,寻找角点约束和面点约束
(3)角点约束,首先进行雷达运动补偿,通过kdtee从上一帧中寻找距离当前帧角点最近的一个点p1,根据p1去找不同线上距离最近的点p2, 根据点到直线的垂线距离,构建残差方程给到ceres,可以求解出点到线的约束
(4)面点约束,首先进行雷达运动补偿,通过kdtee从上一帧中寻找距离当前帧角点最近的一个点p1,根据p1去找相同线上距离最近的点p2,根据p1去找不同线上距离最近的点p3,根据点到平面的距离,构建残差方程给到ceres,可以求解出点到面的约束
(5)通过两次迭代,进行ceres求解 得到最终的帧间约束结果,与之前的坐标约束进行求解,就得到了前端激光里程计
2.2.1运动补偿部分
激光雷达运动补偿:就是把所有的点补偿到某一时刻,这样就可以把本身过去100ms的点收集到一个时间点上去
void TransformToStart(PointType const *const pi, PointType *const po)
{// interpolation ratiodouble s;// 由于kitti数据集上的lidar已经做过了运动补偿,因此这里就不做具体补偿了if (DISTORTION)s = (pi->intensity - int(pi->intensity)) / SCAN_PERIOD;elses = 1.0; // s=1s说明全部补偿到点云结束的时刻// s = 1;// 所有点的操作方式都是一致的,相当于从结束时刻补偿到起始时刻// 这里相当于是一个匀速模型的假设Eigen::Quaterniond q_point_last = Eigen::Quaterniond::Identity().slerp(s, q_last_curr);Eigen::Vector3d t_point_last = s * t_last_curr;Eigen::Vector3d point(pi->x, pi->y, pi->z);Eigen::Vector3d un_point = q_point_last * point + t_point_last;po->x = un_point.x();po->y = un_point.y();po->z = un_point.z();po->intensity = pi->intensity;
}
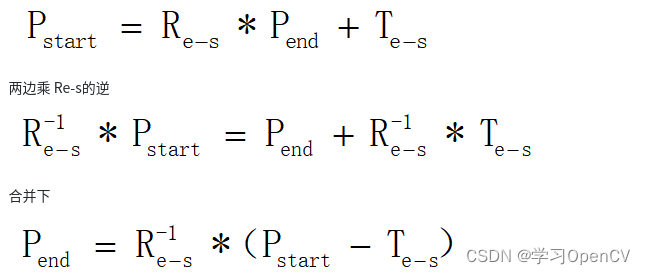
根据反变换求出结束时刻的点坐标,附公式推解
void TransformToEnd(PointType const *const pi, PointType *const po)
{// undistort point firstpcl::PointXYZI un_point_tmp;// 把所有点补偿到起始时刻TransformToStart(pi, &un_point_tmp);//再 通过反变换的方式 将起始时刻坐标系下的点 转到 结束时刻坐标系下 Eigen::Vector3d un_point(un_point_tmp.x, un_point_tmp.y, un_point_tmp.z);//取出起始时刻坐标系下的点//q_last_curr \ t_last_curr 是结束时刻坐标系转到起始时刻坐标系 的 旋转 和 平移 Eigen::Vector3d point_end = q_last_curr.inverse() * (un_point - t_last_curr);//通过反变换,求得转到 结束时刻坐标系下 的点坐标po->x = point_end.x();po->y = point_end.y();po->z = point_end.z();// Remove distortion time infopo->intensity = int(pi->intensity);
}
2.2.2确保5个点云都不为空
// 首先确保5个消息都有,有一个队列为空都不行if (!cornerSharpBuf.empty() && !cornerLessSharpBuf.empty() &&!surfFlatBuf.empty() && !surfLessFlatBuf.empty() &&!fullPointsBuf.empty()){return false;}else{return true;}
2.2.3通过比较时间戳,判断是否是同一帧
// 分别求出队列第一个时间timeCornerPointsSharp = cornerSharpBuf.front()->header.stamp.toSec();timeCornerPointsLessSharp = cornerLessSharpBuf.front()->header.stamp.toSec();timeSurfPointsFlat = surfFlatBuf.front()->header.stamp.toSec();timeSurfPointsLessFlat = surfLessFlatBuf.front()->header.stamp.toSec();timeLaserCloudFullRes = fullPointsBuf.front()->header.stamp.toSec();// 因为同一帧时间戳是相同的,因此这里比较是否是同一帧if (timeCornerPointsSharp != timeLaserCloudFullRes ||timeCornerPointsLessSharp != timeLaserCloudFullRes ||timeSurfPointsFlat != timeLaserCloudFullRes ||timeSurfPointsLessFlat != timeLaserCloudFullRes){printf("点云消息时间戳不同步!");return true;}else{return false;}
2.2.4传感器格式转换成点云格式
// 分别将5个消息取出来,同时转成pcl的点云格式
mBuf.lock();
cornerPointsSharp->clear();
// 将第一根元素存放到cornerPointsSharp 就是当前的点云
pcl::fromROSMsg(*cornerSharpBuf.front(), *cornerPointsSharp);
// 移除前端的第一个元素 当前待处理的点云
cornerSharpBuf.pop();cornerPointsLessSharp->clear();
pcl::fromROSMsg(*cornerLessSharpBuf.front(), *cornerPointsLessSharp);
cornerLessSharpBuf.pop();surfPointsFlat->clear();
pcl::fromROSMsg(*surfFlatBuf.front(), *surfPointsFlat);
surfFlatBuf.pop();surfPointsLessFlat->clear();
pcl::fromROSMsg(*surfLessFlatBuf.front(), *surfPointsLessFlat);
surfLessFlatBuf.pop();laserCloudFullRes->clear();
pcl::fromROSMsg(*fullPointsBuf.front(), *laserCloudFullRes);
fullPointsBuf.pop();
mBuf.unlock();
2.2.5 点到线残差构建
for (int i = 0; i < cornerPointsSharpNum; ++i)
{// 运动补偿TransformToStart(&(cornerPointsSharp->points[i]), &pointSel);// 在上一帧所有角点构成的kdtee中寻找距离当前帧最近的一个点kdtreeCornerLast->nearestKSearch(pointSel, 1, pointSearchInd, pointSearchSqDis);int closestPointInd = -1, minPointInd2 = -1;// 只有小于给定界限才认为是有效约束if (pointSearchSqDis[0] < DISTANCE_SQ_THRESHOLD){closestPointInd = pointSearchInd[0]; // 对应的最近距离约束的索引取出来// 找到其所对应的线束id 线束信息隐藏在intensity中int closestPointScanID = int(laserCloudCornerLast->points[closestPointInd].intensity);double minPointSqDis2 = DISTANCE_SQ_THRESHOLD;// 寻找角点,在刚刚角点的id上下分别继续寻找,目的是找到最近的角点,由于其按照约束进行排序,所以就是向上找for (int j = closestPointInd + 1; j < (int)laserCloudCornerLast->points.size(); ++j){// 不找同一根线束的if (int(laserCloudCornerLast->points[j].intensity) <= closestPointScanID)continue;// 要求找到的线束距离当前线束不能太远if (int(laserCloudCornerLast->points[j].intensity) > (closestPointScanID + NEARBY_SCAN))break;// 上一帧线的第2个点 到当前帧点的距离double pointSqDis = (laserCloudCornerLast->points[j].x - pointSel.x) *(laserCloudCornerLast->points[j].x - pointSel.x) +(laserCloudCornerLast->points[j].y - pointSel.y) *(laserCloudCornerLast->points[j].y - pointSel.y) +(laserCloudCornerLast->points[j].z - pointSel.z) *(laserCloudCornerLast->points[j].z - pointSel.z);if (pointSqDis < minPointSqDis2){minPointSqDis2 = pointSqDis;minPointInd2 = j;}}// 同样另外一个方向寻找角点for (int j = closestPointInd - 1; j >= 0; --j){if (int(laserCloudCornerLast->points[j].intensity) >= closestPointScanID)continue;if (int(laserCloudCornerLast->points[j].intensity) < (closestPointScanID - NEARBY_SCAN))break;double pointSqDis = (laserCloudCornerLast->points[j].x - pointSel.x) *(laserCloudCornerLast->points[j].x - pointSel.x) +(laserCloudCornerLast->points[j].y - pointSel.y) *(laserCloudCornerLast->points[j].y - pointSel.y) +(laserCloudCornerLast->points[j].z - pointSel.z) *(laserCloudCornerLast->points[j].z - pointSel.z);if (pointSqDis < minPointSqDis2){// 取出当前点和上一帧的两个角点minPointSqDis2 = pointSqDis;minPointInd2 = j;}}}// 最近点所在的线束if (minPointInd2 >= 0){// 当前点Eigen::Vector3d curr_point(cornerPointsSharp->points[i].x,cornerPointsSharp->points[i].y,cornerPointsSharp->points[i].z);// 距离当前点最近的上一帧的点Eigen::Vector3d last_point_a(laserCloudCornerLast->points[closestPointInd].x,laserCloudCornerLast->points[closestPointInd].y,laserCloudCornerLast->points[closestPointInd].z);// 距离上一帧点最近的不同线束上的第二个点 构成棱Eigen::Vector3d last_point_b(laserCloudCornerLast->points[minPointInd2].x,laserCloudCornerLast->points[minPointInd2].y,laserCloudCornerLast->points[minPointInd2].z);double s;if (DISTORTION)// 点在起始点到结束点一周中的进度s = (cornerPointsSharp->points[i].intensity - int(cornerPointsSharp->points[i].intensity)) / SCAN_PERIOD;elses = 1.0;// 残差项ceres::CostFunction *cost_function = LidarEdgeFactor::Create(curr_point, last_point_a, last_point_b, s);// 添加残差块 残差项 损失函数 待优化的变量problem.AddResidualBlock(cost_function, loss_function, para_q, para_t);corner_correspondence++;}
}
2.2.6 点到面残差构建
for (int i = 0; i < surfPointsFlatNum; ++i)
{TransformToStart(&(surfPointsFlat->points[i]), &pointSel);// 先找上一帧距离当前帧最近的面点kdtreeSurfLast->nearestKSearch(pointSel, 1, pointSearchInd, pointSearchSqDis);int closestPointInd = -1, minPointInd2 = -1, minPointInd3 = -1;// 距离必须小于阈值if (pointSearchSqDis[0] < DISTANCE_SQ_THRESHOLD){// 取出找到的上一帧面点的索引closestPointInd = pointSearchInd[0];// 取出最近的面点在上一帧的那一条scan线上int closestPointScanID = int(laserCloudSurfLast->points[closestPointInd].intensity);double minPointSqDis2 = DISTANCE_SQ_THRESHOLD, minPointSqDis3 = DISTANCE_SQ_THRESHOLD;// 额外在寻找两个点,要求一个点和最近点同一个scan线 另一个点不同的scan// 按照增量方向寻找其它面点for (int j = closestPointInd + 1; j < (int)laserCloudSurfLast->points.size(); ++j){// 不能和当前找到的上一帧面点线束太远if (int(laserCloudSurfLast->points[j].intensity) > (closestPointScanID + NEARBY_SCAN))break;// 计算和当前帧该点距离double pointSqDis = (laserCloudSurfLast->points[j].x - pointSel.x) *(laserCloudSurfLast->points[j].x - pointSel.x) +(laserCloudSurfLast->points[j].y - pointSel.y) *(laserCloudSurfLast->points[j].y - pointSel.y) +(laserCloudSurfLast->points[j].z - pointSel.z) *(laserCloudSurfLast->points[j].z - pointSel.z);// 如果是同一根scan且距离最近if (int(laserCloudSurfLast->points[j].intensity) <= closestPointScanID && pointSqDis < minPointSqDis2){minPointSqDis2 = pointSqDis;minPointInd2 = j;}// 如果是其它的线束点else if (int(laserCloudSurfLast->points[j].intensity) > closestPointScanID && pointSqDis < minPointSqDis3){minPointSqDis3 = pointSqDis;minPointInd3 = j;}}// 同样的方式 按照降序的方式去找这两个点for (int j = closestPointInd - 1; j >= 0; --j){if (int(laserCloudSurfLast->points[j].intensity) < (closestPointScanID - NEARBY_SCAN))break;double pointSqDis = (laserCloudSurfLast->points[j].x - pointSel.x) *(laserCloudSurfLast->points[j].x - pointSel.x) +(laserCloudSurfLast->points[j].y - pointSel.y) *(laserCloudSurfLast->points[j].y - pointSel.y) +(laserCloudSurfLast->points[j].z - pointSel.z) *(laserCloudSurfLast->points[j].z - pointSel.z);if (int(laserCloudSurfLast->points[j].intensity) >= closestPointScanID && pointSqDis < minPointSqDis2){minPointSqDis2 = pointSqDis;minPointInd2 = j;}else if (int(laserCloudSurfLast->points[j].intensity) < closestPointScanID && pointSqDis < minPointSqDis3){minPointSqDis3 = pointSqDis;minPointInd3 = j;}}// 如果找到的另外两个点是有效值,就取出它们的3d坐标if (minPointInd2 >= 0 && minPointInd3 >= 0){// 当前角点Eigen::Vector3d curr_point(surfPointsFlat->points[i].x,surfPointsFlat->points[i].y,surfPointsFlat->points[i].z);// 上一帧距离当前焦点最近的点Eigen::Vector3d last_point_a(laserCloudSurfLast->points[closestPointInd].x,laserCloudSurfLast->points[closestPointInd].y,laserCloudSurfLast->points[closestPointInd].z);Eigen::Vector3d last_point_b(laserCloudSurfLast->points[minPointInd2].x,laserCloudSurfLast->points[minPointInd2].y,laserCloudSurfLast->points[minPointInd2].z);Eigen::Vector3d last_point_c(laserCloudSurfLast->points[minPointInd3].x,laserCloudSurfLast->points[minPointInd3].y,laserCloudSurfLast->points[minPointInd3].z);double s;if (DISTORTION)s = (surfPointsFlat->points[i].intensity - int(surfPointsFlat->points[i].intensity)) / SCAN_PERIOD;elses = 1.0;// 构建点到面的约束ceres::CostFunction *cost_function = LidarPlaneFactor::Create(curr_point, last_point_a, last_point_b, last_point_c, s);problem.AddResidualBlock(cost_function, loss_function, para_q, para_t);plane_correspondence++;}}
}
2.2.7发布激光里程计和角点面点降频发送给后端
// 发布雷达里程计结果
nav_msgs::Odometry laserOdometry;
laserOdometry.header.frame_id = "/map";
laserOdometry.child_frame_id = "/laser_odom";
laserOdometry.header.stamp = ros::Time().fromSec(timeSurfPointsLessFlat);
// 以四元数和平移向量发布出去
laserOdometry.pose.pose.orientation.x = q_w_curr.x();
laserOdometry.pose.pose.orientation.y = q_w_curr.y();
laserOdometry.pose.pose.orientation.z = q_w_curr.z();
laserOdometry.pose.pose.orientation.w = q_w_curr.w();
laserOdometry.pose.pose.position.x = t_w_curr.x();
laserOdometry.pose.pose.position.y = t_w_curr.y();
laserOdometry.pose.pose.position.z = t_w_curr.z();
pubLaserOdometry.publish(laserOdometry);
// 激光里程计路径
geometry_msgs::PoseStamped laserPose;
nav_msgs::Path laserPath;
laserPose.header = laserOdometry.header;
laserPose.pose = laserOdometry.pose.pose;
laserPath.header.stamp = laserOdometry.header.stamp;
laserPath.poses.push_back(laserPose);
laserPath.header.frame_id = "/map";
pubLaserPath.publish(laserPath);
// 一般角点
pcl::PointCloud<PointType>::Ptr laserCloudTemp = cornerPointsLessSharp;
// 上一帧的一般角点
cornerPointsLessSharp = laserCloudCornerLast;
laserCloudCornerLast = laserCloudTemp;//
laserCloudTemp = surfPointsLessFlat;
surfPointsLessFlat = laserCloudSurfLast;
laserCloudSurfLast = laserCloudTemp;laserCloudCornerLastNum = laserCloudCornerLast->points.size();
laserCloudSurfLastNum = laserCloudSurfLast->points.size();// kdtree设置当前帧,用来下一帧lidar odom使用
kdtreeCornerLast->setInputCloud(laserCloudCornerLast);
kdtreeSurfLast->setInputCloud(laserCloudSurfLast);
// 一定降频后给后端发送
if (frameCount % skipFrameNum == 0)
{frameCount = 0;// 一般角点sensor_msgs::PointCloud2 laserCloudCornerLast2;pcl::toROSMsg(*laserCloudCornerLast, laserCloudCornerLast2);laserCloudCornerLast2.header.stamp = ros::Time().fromSec(timeSurfPointsLessFlat);laserCloudCornerLast2.header.frame_id = "/camera";pubLaserCloudCornerLast.publish(laserCloudCornerLast2);// 面点sensor_msgs::PointCloud2 laserCloudSurfLast2;pcl::toROSMsg(*laserCloudSurfLast, laserCloudSurfLast2);laserCloudSurfLast2.header.stamp = ros::Time().fromSec(timeSurfPointsLessFlat);laserCloudSurfLast2.header.frame_id = "/camera";pubLaserCloudSurfLast.publish(laserCloudSurfLast2);// 整体点云sensor_msgs::PointCloud2 laserCloudFullRes3;pcl::toROSMsg(*laserCloudFullRes, laserCloudFullRes3);laserCloudFullRes3.header.stamp = ros::Time().fromSec(timeSurfPointsLessFlat);laserCloudFullRes3.header.frame_id = "/camera";pubLaserCloudFullRes.publish(laserCloudFullRes3);
}
2.3 scan-map 后端匹配 点云插入地图laserMapping.cpp
2.3.1 传感器数据类型转换成点云 odom转换为eigen类型
// 点云全部转换为pcl的数据格式laserCloudCornerLast->clear();pcl::fromROSMsg(*cornerLastBuf.front(), *laserCloudCornerLast);cornerLastBuf.pop();laserCloudSurfLast->clear();pcl::fromROSMsg(*surfLastBuf.front(), *laserCloudSurfLast);surfLastBuf.pop();laserCloudFullRes->clear();pcl::fromROSMsg(*fullResBuf.front(), *laserCloudFullRes);fullResBuf.pop();// lidar odom 的结果转成eigen数据格式q_wodom_curr.x() = odometryBuf.front()->pose.pose.orientation.x;q_wodom_curr.y() = odometryBuf.front()->pose.pose.orientation.y;q_wodom_curr.z() = odometryBuf.front()->pose.pose.orientation.z;q_wodom_curr.w() = odometryBuf.front()->pose.pose.orientation.w;t_wodom_curr.x() = odometryBuf.front()->pose.pose.position.x;t_wodom_curr.y() = odometryBuf.front()->pose.pose.position.y;t_wodom_curr.z() = odometryBuf.front()->pose.pose.position.z;odometryBuf.pop();// 考虑到实时性,就把队列其他的都pop出去,不然可能出现处理延时的情况while (!cornerLastBuf.empty()){cornerLastBuf.pop();printf("普通面点未清空 \n");}mBuf.unlock();
2.3.2 根据前端结果 得到后端的初始位姿
// q_wodom_curr t_wodom_curr 是雷达的odom// q_w_curr t_w_curr是map坐标系下的位姿q_w_curr = q_wmap_wodom * q_wodom_curr;t_w_curr = q_wmap_wodom * t_wodom_curr + t_wmap_wodom;
2.3.3根据位置,获得全局地图的中心格子
// 根据初始估计值计算寻找当前位姿在地图中的索引,一个各自边长是50m// 后端的地图本质上是一个以当前点为中心的一个栅格地图// 判断在全局栅格的哪一个栅格里,一个栅格是50m 栅格中心是25m// t_w_curr 是map坐标系下的位姿 centerCubeI网格中心centerCubeI = int((t_w_curr.x() + 25.0) / 50.0) + laserCloudCenWidth;centerCubeJ = int((t_w_curr.y() + 25.0) / 50.0) + laserCloudCenHeight;centerCubeK = int((t_w_curr.z() + 25.0) / 50.0) + laserCloudCenDepth;// 由于c语言的取整是向0取整 因此如-1.66 成为了-1 但-2才是正确的,因此这里自减1if (t_w_curr.x() + 25.0 < 0)centerCubeI--;if (t_w_curr.y() + 25.0 < 0)centerCubeJ--;if (t_w_curr.z() + 25.0 < 0)centerCubeK--;
2.3.4 根据机器人位置 更新全局地图范围 其它方向雷同
// 如果当前centerCubeI栅格索引小于3,就说明当前点快接近地图边界了,需要进行调整,相当于地图整体往x正方向移动while (centerCubeI < 3){for (int j = 0; j < laserCloudHeight; j++){for (int k = 0; k < laserCloudDepth; k++){// laserCloudWidth是widtch方向栅格总大小21 laserCloudHeight 21int i = laserCloudWidth - 1;// 从x最大值开始pcl::PointCloud<PointType>::Ptr laserCloudCubeCornerPointer =// 角点laserCloudCornerArray[i + laserCloudWidth * j + laserCloudWidth * laserCloudHeight * k];pcl::PointCloud<PointType>::Ptr laserCloudCubeSurfPointer =// 面点laserCloudSurfArray[i + laserCloudWidth * j + laserCloudWidth * laserCloudHeight * k];// 整体右移for (; i >= 1; i--){laserCloudCornerArray[i + laserCloudWidth * j + laserCloudWidth * laserCloudHeight * k] =laserCloudCornerArray[i - 1 + laserCloudWidth * j + laserCloudWidth * laserCloudHeight * k];laserCloudSurfArray[i + laserCloudWidth * j + laserCloudWidth * laserCloudHeight * k] =laserCloudSurfArray[i - 1 + laserCloudWidth * j + laserCloudWidth * laserCloudHeight * k];}// 此时i=0,也就是最左边的格子赋值了之前最右边的格子laserCloudCornerArray[i + laserCloudWidth * j + laserCloudWidth * laserCloudHeight * k] =laserCloudCubeCornerPointer;laserCloudSurfArray[i + laserCloudWidth * j + laserCloudWidth * laserCloudHeight * k] =laserCloudCubeSurfPointer;// 该点云清零,由于是指针操作,相当于最左边的格子清空了laserCloudCubeCornerPointer->clear();laserCloudCubeSurfPointer->clear();}}// 索引右移centerCubeI++;laserCloudCenWidth++;}
2.3.5根据全局地图中心 ,提取局部地图每个格子在全局地图中的位置
// 从当前格子为中心,选出地图中一定范围的点云 5*5*3 75个cube
for (int i = centerCubeI - 2; i <= centerCubeI + 2; i++) // 宽度方向
{for (int j = centerCubeJ - 2; j <= centerCubeJ + 2; j++) // 高度方向{for (int k = centerCubeK - 1; k <= centerCubeK + 1; k++) // 深度方向{if (i >= 0 && i < laserCloudWidth &&j >= 0 && j < laserCloudHeight &&k >= 0 && k < laserCloudDepth){// 把每个格子序号依次存到对应的索引// i + laserCloudWidth * j 二维度平面位置// 每个格子在三维全局地图中的位置laserCloudValidInd[laserCloudValidNum] = i + laserCloudWidth * j + laserCloudWidth * laserCloudHeight * k;// 局部地图格子数量laserCloudValidNum++;laserCloudSurroundInd[laserCloudSurroundNum] = i + laserCloudWidth * j + laserCloudWidth * laserCloudHeight * k;laserCloudSurroundNum++;}}}
}
2.3.6当前帧 根据每个格子的在全局地图中的id,将局部地图的每个格子角点和面点分别叠加
laserCloudCornerFromMap->clear();
laserCloudSurfFromMap->clear();
// 开始构建用来这一帧优化的小的局部地图 根据上面得到的索引进行叠加求和
for (int i = 0; i < laserCloudValidNum; i++)
{// 角点叠加// laserCloudValidInd[i] 每个格子的在全局地图中的位置*laserCloudCornerFromMap += *laserCloudCornerArray[laserCloudValidInd[i]];// 面点叠加*laserCloudSurfFromMap += *laserCloudSurfArray[laserCloudValidInd[i]];
}
2.3.7对当前帧角点面点下采样
// 角点
downSizeFilterCorner.setInputCloud(laserCloudCornerLast);
downSizeFilterCorner.filter(*laserCloudCornerStack);
// 面点
downSizeFilterSurf.setInputCloud(laserCloudSurfLast);
downSizeFilterSurf.filter(*laserCloudSurfStack);
2.3.8点线残差构建 ,这里和前端有区别 ,通过最邻近的5个地图点进行构建协方差矩阵,通过协方差矩阵最大特征值与次大特征值判断是否存在直线
int corner_num = 0;// 构建角点相关约束for (int i = 0; i < laserCloudCornerStackNum; i++){// 实时角点 点坐标pointOri = laserCloudCornerStack->points[i];// 把雷达点转换到map坐标系pointAssociateToMap(&pointOri, &pointSel);// 局部地图中寻找和该点最近的5个点// pointSearchInd 5个点在局部地图中的索引kdtreeCornerFromMap->nearestKSearch(pointSel, 5, pointSearchInd, pointSearchSqDis);// 判断最远的点距离不能超过1m,否则就是无效约束if (pointSearchSqDis[4] < 1.0){std::vector<Eigen::Vector3d> nearCorners;Eigen::Vector3d center(0, 0, 0);for (int j = 0; j < 5; j++){Eigen::Vector3d tmp(laserCloudCornerFromMap->points[pointSearchInd[j]].x,laserCloudCornerFromMap->points[pointSearchInd[j]].y,laserCloudCornerFromMap->points[pointSearchInd[j]].z);// 5个点坐标的叠加center = center + tmp;// 转存这5个点给nearCornersnearCorners.push_back(tmp);}// 计算这5个点的均值center = center / 5.0;Eigen::Matrix3d covMat = Eigen::Matrix3d::Zero();// 构建协方差矩阵,5个变量的变化趋势for (int j = 0; j < 5; j++){// 每个点与均值之间的偏移量Eigen::Matrix<double, 3, 1> tmpZeroMean = nearCorners[j] - center;// 该点与该点转置的外积 当前矩阵与当前矩阵的转置 得到3*3的矩阵,当前点的协方差矩阵covMat = covMat + tmpZeroMean * tmpZeroMean.transpose();}// 进行特征值分解Eigen::SelfAdjointEigenSolver<Eigen::Matrix3d> saes(covMat);// 根据特征值分解情况看看是不是真正的线特征// 特征向量就是线特征的方向 Eigen::Vector3d unit_direction = saes.eigenvectors().col(2);Eigen::Vector3d curr_point(pointOri.x, pointOri.y, pointOri.z);// 最大特征值大于次大特征值的3倍认为是线特征if (saes.eigenvalues()[2] > 3 * saes.eigenvalues()[1]){Eigen::Vector3d point_on_line = center;Eigen::Vector3d point_a, point_b;// 根据拟合出来的线特征方向,以平均点为中心构建两个虚拟点//从中心点沿着方向向量向两端移动0.1m,使用两个点代替一条直线,//这样计算点到直线的距离的形式就跟laserOdometry相似point_a = 0.1 * unit_direction + point_on_line;point_b = -0.1 * unit_direction + point_on_line;// 构建约束 和lidar odom 约束一致ceres::CostFunction *cost_function = LidarEdgeFactor::Create(curr_point, point_a, point_b, 1.0);problem.AddResidualBlock(cost_function, loss_function, parameters, parameters + 4);corner_num++;}}}
2.3.9点面残差构建 这里与前端有区别 面的构建通过 最临近当前角点的5个点 通过构建超定方程 qr分解获得的 法向量与点之间的关系
int surf_num = 0;
// 构建面点的约束
for (int i = 0; i < laserCloudSurfStackNum; i++)
{// 实时面点坐标pointOri = laserCloudSurfStack->points[i];// 把雷达点坐标转到map坐标系pointAssociateToMap(&pointOri, &pointSel);// 局部地图中搜索距离该点最近的5个点kdtreeSurfFromMap->nearestKSearch(pointSel, 5, pointSearchInd, pointSearchSqDis);Eigen::Matrix<double, 5, 3> matA0;Eigen::Matrix<double, 5, 1> matB0 = -1 * Eigen::Matrix<double, 5, 1>::Ones();// 构建面点方程ax+by+cz+d=0// 通过构建一个超定方程求解这个平面方程// 判断最远的点距离不能超过1m,否则就是无效约束if (pointSearchSqDis[4] < 1.0){for (int j = 0; j < 5; j++){matA0(j, 0) = laserCloudSurfFromMap->points[pointSearchInd[j]].x;matA0(j, 1) = laserCloudSurfFromMap->points[pointSearchInd[j]].y;matA0(j, 2) = laserCloudSurfFromMap->points[pointSearchInd[j]].z;}// 通过eigen接口求解该方程,解就是这个平面的法向量// 豪斯霍尔德变换Eigen::Vector3d norm = matA0.colPivHouseholderQr().solve(matB0);double negative_OA_dot_norm = 1 / norm.norm();// 法向量归一化norm.normalize();bool planeValid = true;// 根据求出来的平面方程进行校验 看看是不是符合平面约束for (int j = 0; j < 5; j++){// 这里相当于求解点到平面的距离if (fabs(norm(0) * laserCloudSurfFromMap->points[pointSearchInd[j]].x +norm(1) * laserCloudSurfFromMap->points[pointSearchInd[j]].y +norm(2) * laserCloudSurfFromMap->points[pointSearchInd[j]].z + negative_OA_dot_norm) > 0.2){planeValid = false; // 点如果距离平面过远,就认为这是一个拟合的不好的平面break;}}Eigen::Vector3d curr_point(pointOri.x, pointOri.y, pointOri.z);// 如果平面有效就构建平面约束if (planeValid){// 利用平面方程构建约束 和前端构建形式稍有不同ceres::CostFunction *cost_function = LidarPlaneNormFactor::Create(curr_point, norm, negative_OA_dot_norm);problem.AddResidualBlock(cost_function, loss_function, parameters, parameters + 4);surf_num++;}
2.2.10通过反变换更新odom-》map的tf关系
// q_wmap_wodom t_wmap_wodom是map到odom之间的关系
q_wmap_wodom = q_w_curr * q_wodom_curr.inverse();
t_wmap_wodom = t_w_curr - q_wmap_wodom * t_wodom_curr;
2.2.11将优化后的当前帧角点加入到局部地图,面点雷同
for (int i = 0; i < laserCloudCornerStackNum; i++)
{// 该点根据位姿投到地图坐标系pointAssociateToMap(&laserCloudCornerStack->points[i], &pointSel);// 算出这个点所在的格子在全局地图中的索引int cubeI = int((pointSel.x + 25.0) / 50.0) + laserCloudCenWidth;int cubeJ = int((pointSel.y + 25.0) / 50.0) + laserCloudCenHeight;int cubeK = int((pointSel.z + 25.0) / 50.0) + laserCloudCenDepth;// 同样负数做对应的操作if (pointSel.x + 25.0 < 0)cubeI--;if (pointSel.y + 25.0 < 0)cubeJ--;if (pointSel.z + 25.0 < 0)cubeK--;// 如果超过边界的话就算了if (cubeI >= 0 && cubeI < laserCloudWidth &&cubeJ >= 0 && cubeJ < laserCloudHeight &&cubeK >= 0 && cubeK < laserCloudDepth){// 当前格子在全局地图中的索引int cubeInd = cubeI + laserCloudWidth * cubeJ + laserCloudWidth * laserCloudHeight * cubeK;// 将当前帧点云角点插入到角点格子中laserCloudCornerArray[cubeInd]->push_back(pointSel);}
}
2.2.12把当前帧涉及到的局部地图下采样
for (int i = 0; i < laserCloudValidNum; i++){int ind = laserCloudValidInd[i];pcl::PointCloud<PointType>::Ptr tmpCorner(new pcl::PointCloud<PointType>());downSizeFilterCorner.setInputCloud(laserCloudCornerArray[ind]);downSizeFilterCorner.filter(*tmpCorner);laserCloudCornerArray[ind] = tmpCorner;pcl::PointCloud<PointType>::Ptr tmpSurf(new pcl::PointCloud<PointType>());downSizeFilterSurf.setInputCloud(laserCloudSurfArray[ind]);downSizeFilterSurf.filter(*tmpSurf);laserCloudSurfArray[ind] = tmpSurf;}
2.2.13局部地图发布
// 每隔5帧对外发布一下
if (frameCount % 5 == 0)
{laserCloudSurround->clear();// 把当前帧相关的局部地图发布出去 laserCloudSurroundNum 坐标点的索引数目for (int i = 0; i < laserCloudSurroundNum; i++){int ind = laserCloudSurroundInd[i];*laserCloudSurround += *laserCloudCornerArray[ind];*laserCloudSurround += *laserCloudSurfArray[ind];}sensor_msgs::PointCloud2 laserCloudSurround3;pcl::toROSMsg(*laserCloudSurround, laserCloudSurround3);laserCloudSurround3.header.stamp = ros::Time().fromSec(timeLaserOdometry);laserCloudSurround3.header.frame_id = "/map";pubLaserCloudSurround.publish(laserCloudSurround3);
}
2.2.14全局地图发布
// 每隔20帧发布一次全局地图
if (frameCount % 20 == 0)
{// 21*21*11=4851pcl::PointCloud<PointType> laserCloudMap;for (int i = 0; i < 4851; i++){laserCloudMap += *laserCloudCornerArray[i];laserCloudMap += *laserCloudSurfArray[i];}sensor_msgs::PointCloud2 laserCloudMsg;pcl::toROSMsg(laserCloudMap, laserCloudMsg);laserCloudMsg.header.stamp = ros::Time().fromSec(timeLaserOdometry);laserCloudMsg.header.frame_id = "/map";pubLaserCloudMap.publish(laserCloudMsg);
}
2.2.15全局位姿,轨迹 tf 发布
// 发布当前位姿
nav_msgs::Odometry odomAftMapped;
odomAftMapped.header.frame_id = "/map";
odomAftMapped.child_frame_id = "/laser_link";
odomAftMapped.header.stamp = ros::Time().fromSec(timeLaserOdometry);
odomAftMapped.pose.pose.orientation.x = q_w_curr.x();
odomAftMapped.pose.pose.orientation.y = q_w_curr.y();
odomAftMapped.pose.pose.orientation.z = q_w_curr.z();
odomAftMapped.pose.pose.orientation.w = q_w_curr.w();
odomAftMapped.pose.pose.position.x = t_w_curr.x();
odomAftMapped.pose.pose.position.y = t_w_curr.y();
odomAftMapped.pose.pose.position.z = t_w_curr.z();
pubOdomAftMapped.publish(odomAftMapped);
// 发布当前轨迹
geometry_msgs::PoseStamped laserAfterMappedPose;
laserAfterMappedPose.header = odomAftMapped.header;
laserAfterMappedPose.pose = odomAftMapped.pose.pose;
laserAfterMappedPath.header.stamp = odomAftMapped.header.stamp;
laserAfterMappedPath.header.frame_id = "/map";
laserAfterMappedPath.poses.push_back(laserAfterMappedPose);
pubLaserAfterMappedPath.publish(laserAfterMappedPath);// 发布tf
static tf::TransformBroadcaster br;
tf::Transform transform;
tf::Quaternion q;
transform.setOrigin(tf::Vector3(t_w_curr(0),t_w_curr(1),t_w_curr(2)));
q.setW(q_w_curr.w());
q.setX(q_w_curr.x());
q.setY(q_w_curr.y());
q.setZ(q_w_curr.z());
transform.setRotation(q);
br.sendTransform(tf::StampedTransform(transform, odomAftMapped.header.stamp, "/map", "/laser_link"));