e2studio开发RA2E1.5--GPIO输入检测
- 概述
- 视频教学
- 样品申请
- 硬件准备
- 参考程序
- 源码下载
- 新建工程
- 工程模板
- 保存工程路径
- 芯片配置
- 工程模板选择
- 时钟设置
- GPIO口配置
- 按键口配置
- 按键口&Led配置
- R_IOPORT_PortRead()函数原型
- R_IOPORT_PinRead()函数原型
- 代码
概述
本篇文章主要介绍如何使用e2studio对瑞萨单片机进行GPIO输入检测。
最近在瑞萨RA的课程,需要样片的可以加qun申请:925643491。

视频教学
https://www.bilibili.com/video/BV1oxPReEEUW/
e2studio开发RA2E1(5)----GPIO输入检测
样品申请
https://www.wjx.top/vm/rCrkUrz.aspx
硬件准备
首先需要准备一个开发板,这里我准备的是自己绘制的开发板,需要的可以进行申请。
主控为R7FA2E1A72DFL#AA0

参考程序
https://github.com/CoreMaker-lab/RA2E1
https://gitee.com/CoreMaker/RA2E1
源码下载
https://download.csdn.net/download/xinzuofang/90338098
新建工程

工程模板

保存工程路径

芯片配置
本文中使用R7FA2E1A72DFL#AA0来进行演示。

工程模板选择

时钟设置
开发板上的外部高速晶振为12M.

需要修改XTAL为12M。

GPIO口配置
由下图我们可以得知,板子上有4个LED灯,同时需要给高电平才可以点亮。

在e2studio中可以直接设置P913、P914为输出口。

按键口配置
由下图我们可以得知,按键在P000和P001管脚,并且有一个上拉。

在e2studio中可以直接设置P000和P001为输入口。

按键口&Led配置
案例:当按下按键K1,P913亮,当按下按键K2,P914亮,松开按键对应LED灭。
R_IOPORT_PortRead()函数原型
该函数用于读取IO端口的值。指定的端口将被读取,所有引脚的电平将被返回。返回值中的每一位对应于端口上的一个引脚,例如,位7对应引脚7,位6对应引脚6,以此类推。

故可以用R_IOPORT_PortRead()函数进行读取IO口电平状态,该函数是把一个PORT口的16个端口一起读取出来。
ioport_size_t p_port_value_port_0;R_IOPORT_PortRead(&g_ioport_ctrl, BSP_IO_PORT_00, &p_port_value_port_0);if(p_port_value_port_0 &0b1)R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_09_PIN_13, BSP_IO_LEVEL_LOW);elseR_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_09_PIN_13, BSP_IO_LEVEL_HIGH);R_IOPORT_PinRead()函数原型
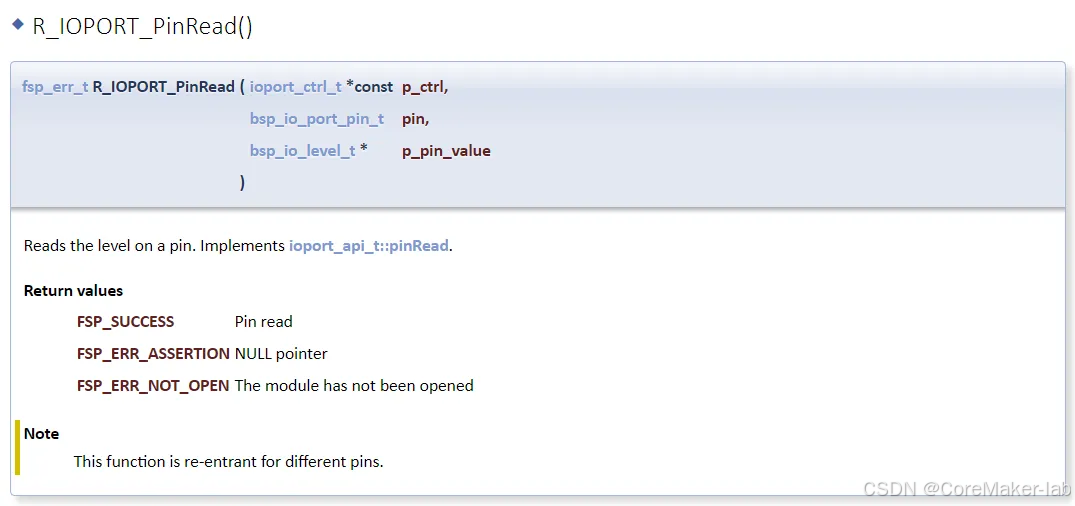
故可以用R_IOPORT_PinRead()函数进行读取IO口电平状态,该函数只能读取一个端口的电平。
bsp_io_level_t p_port_value_pin_001;R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_00_PIN_01, &p_port_value_pin_001);if(p_port_value_pin_001)R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_09_PIN_14, BSP_IO_LEVEL_LOW);elseR_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_09_PIN_14, BSP_IO_LEVEL_HIGH);代码
在hal_entry()中添加如下。
while(1){ioport_size_t p_port_value_port_0;R_IOPORT_PortRead(&g_ioport_ctrl, BSP_IO_PORT_00, &p_port_value_port_0);if(p_port_value_port_0 &0b1)R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_09_PIN_13, BSP_IO_LEVEL_LOW);elseR_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_09_PIN_13, BSP_IO_LEVEL_HIGH);bsp_io_level_t p_port_value_pin_001;R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_00_PIN_01, &p_port_value_pin_001);if(p_port_value_pin_001)R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_09_PIN_14, BSP_IO_LEVEL_LOW);elseR_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_09_PIN_14, BSP_IO_LEVEL_HIGH);}![[吾爱出品]CursorWorkshop V6.33 专业鼠标光标制作工具-简体中文汉化绿色版](https://i-blog.csdnimg.cn/direct/346117dfcd3a47d0871280fb9a1d7641.jpeg)


















