一、SEBlock(通道注意力机制)
先在H*W维度进行压缩,全局平均池化将每个通道平均为一个值。
(B, C, H, W)---- (B, C, 1, 1)
利用各channel维度的相关性计算权重
(B, C, 1, 1) --- (B, C//K, 1, 1) --- (B, C, 1, 1) --- sigmoid
与原特征相乘得到加权后的。
import torch
import torch.nn as nnclass SELayer(nn.Module):def __init__(self, channel, reduction = 4):super(SELayer, self).__init__()self.avg_pool = nn.AdaptiveAvgPool2d(1) //自适应全局池化,只需要给出池化后特征图大小self.fc1 = nn.Sequential(nn.Conv2d(channel, channel//reduction, 1, bias = False),nn.ReLu(implace = True),nn.Conv2d(channel//reduction, channel, 1, bias = False),nn.sigmoid())def forward(self, x):y = self.avg_pool(x)y_out = self.fc1(y)return x * y二、CBAM(通道注意力+空间注意力机制)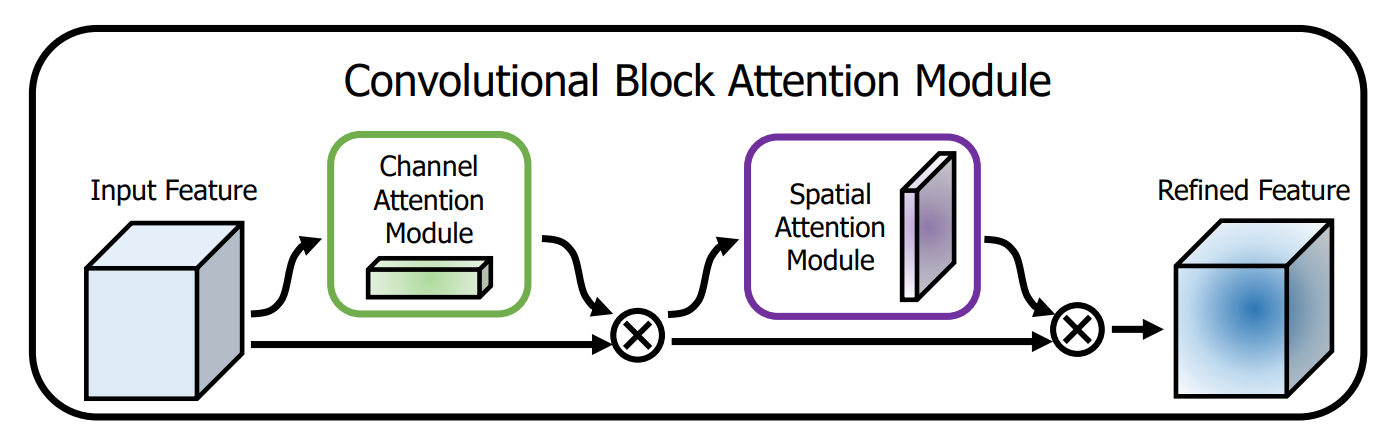
CBAM里面既有通道注意力机制,也有空间注意力机制。
通道注意力同SE的大致相同,但额外加入了全局最大池化与全局平均池化并行。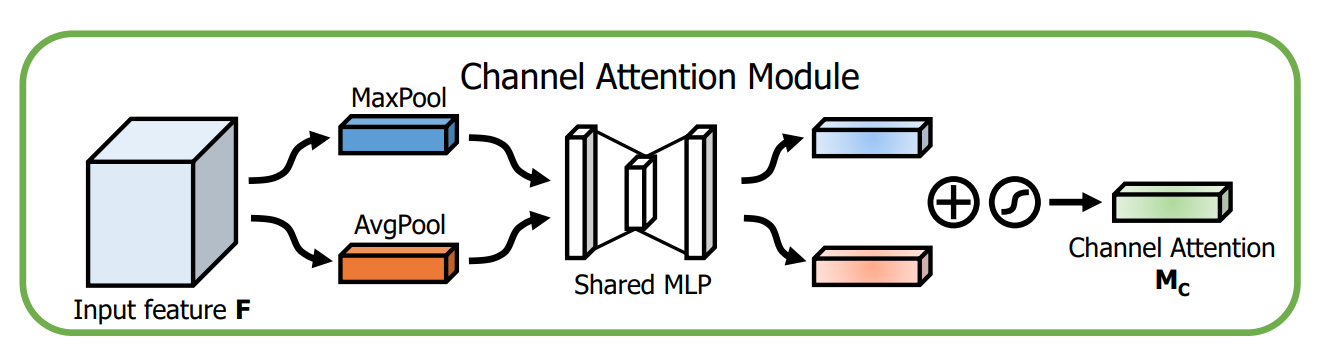
空间注意力机制:先在channel维度进行最大池化和均值池化,然后在channel维度合并,MLP进行特征交融。最终和原始特征相乘。 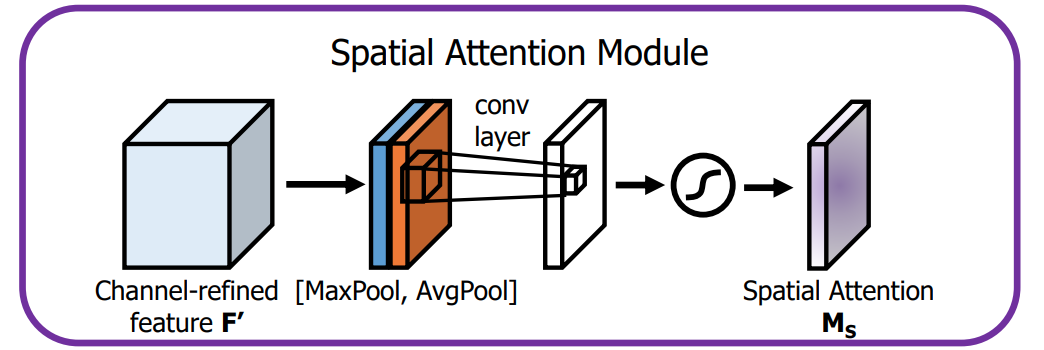
import torch
import torch.nn as nnclass ChannelAttention(nn.Module):def __init__(self, channel, rate = 4):super(ChannelAttention, self).__init__()self.avg_pool = nn.AdaptiveAvgPool2d(1)self.max_pool = nn.AdaptiveMaxPool2d(1)self.fc1 = nn.Sequential(nn.Conv2d(channel, channel//rate, 1, bias = False)nn.ReLu(implace = True)nn.Conv2d(channel//rate, channel, 1, bias = False) )self.sig = nn.sigmoid()def forward(self, x):avg = sefl.avg_pool(x)avg_feature = self.fc1(avg)max = self.max_pool(x)max_feature = self.fc1(max)out = max_feature + avg_featureout = self.sig(out)return x * outimport torch
import torch.nn as nnclass SpatialAttention(nn.Module):def __init__(self):super(SpatialAttention, self).__init__()//(B,C,H,W)---(B,1,H,W)---(B,2,H,W)---(B,1,H,W)self.conv1 = nn.Conv2d(2, 1, kernel_size = 3, padding = 1, bias = False)self.sigmoid = nn.sigmoid()def forward(self, x):mean_f = torch.mean(x, dim = 1, keepdim = True)max_f = torch.max(x, dim = 1, keepdim = True)cat = torch.cat([mean_f, max_f], dim = 1)out = self.conv1(cat)return x*self.sigmod(out)三、transformer里的注意力机制
Scaled Dot-Product Attention
该注意力机制的输入是QKV。
1.先Q,K相乘。
2.scale
3.softmax
4.求output

import torch
import torch.nn as nnclass ScaledDotProductAttention(nn.Module):def __init__(self, scale):super(ScaledDotProductAttention, self)self.scale = scaleself.softmax = nn.softmax(dim = 2)def forward(self, q, k, v):u = torch.bmm(q, k.transpose(1, 2))u = u / scaleattn = self.softmax(u)output = torch.bmm(attn, v)return outputscale = np.power(d_k, 0.5) //缩放系数为K维度的根号。
//Q (B, n_q, d_q) , K (B, n_k, d_k) V (B, n_v, d_v),Q与K的特征维度一定要一样。KV的个数一定要一样。MultiHeadAttention
将QKVchannel维度转换为n*C的形式,相当于分成n份,分别做注意力机制。
1.QKV单头变多头 channel ----- n * new_channel通过linear变换,然后把head和batch先合并
2.求单头注意力机制输出
3.维度拆分 将最终的head和channel合并。
4.linear得到最终输出维度

import torch
import torch.nn as nnclass MultiHeadAttention(nn.Module):def __init__(self, n_head, d_k, d_k_, d_v, d_v_, d_o):super(MultiHeadAttention, self)self.n_head = n_headself.d_k = d_kself.d_v = d_vself.fc_k = nn.Linear(d_k_, n_head * d_k)self.fc_v = nn.Linear(d_v_, n_head * d_v)self.fc_q = nn.Linear(d_k_, n_head * d_k)self.attention = ScaledDotProductAttention(scale=np.power(d_k, 0.5))self.fc_o = nn.Linear(n_head * d_v, d_0)def forward(self, q, k, v):batch, n_q, d_q_ = q.size()batch, n_k, d_k_ = k.size()batch, n_v, d_v_ = v.size()q = self.fc_q(q)k = self.fc_k(k)v = self.fc_v(v)q = q.view(batch, n_q, n_head, d_q).permute(2, 0, 1, 3).contiguous().view(-1, n_q, d_q)k = k.view(batch, n_k, n_head, d_k).permute(2, 0, 1, 3).contiguous().view(-1, n_k, d_k)v = v.view(batch, n_v, n_head, d_v).permute(2, 0, 1, 3).contiguous().view(-1. n_v, d_v) output = self.attention(q, k, v)output = output.view(n_head, batch, n_q, d_v).permute(1, 2, 0, 3).contiguous().view(batch, n_q, -1)output = self.fc_0(output)return output